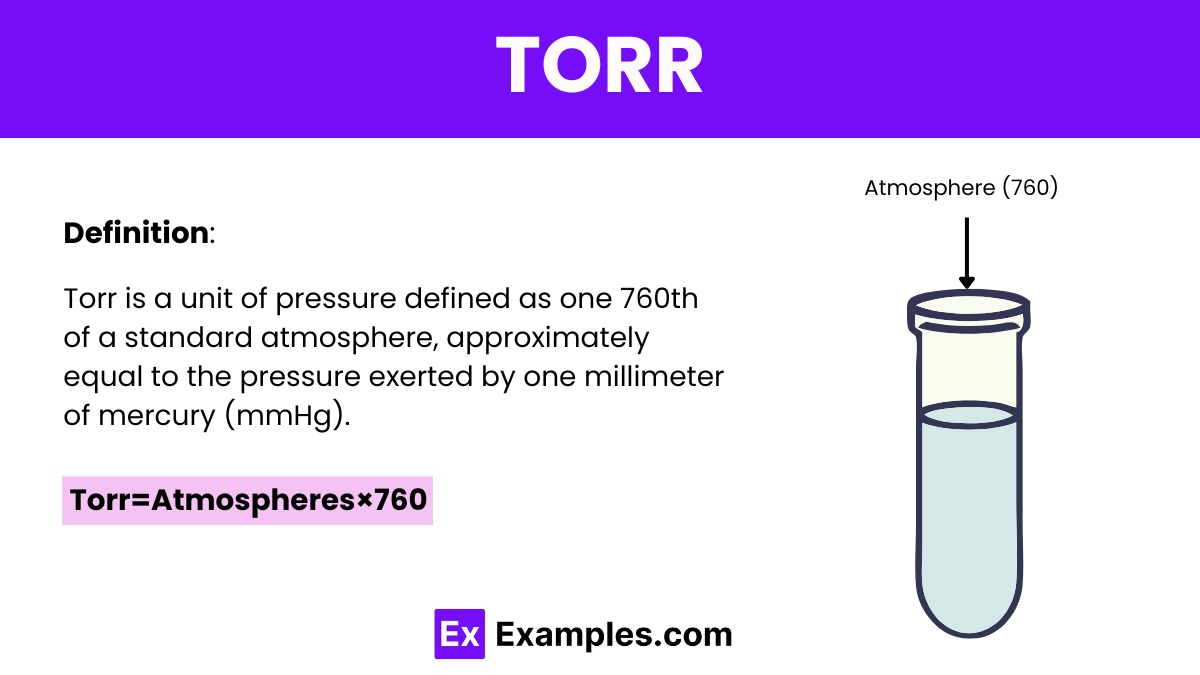
The term “TORR” in the context of drone technology typically refers to a flight controller firmware that has gained significant traction within the FPV (First-Person View) drone community. It’s not a specific drone model or a hardware component in itself, but rather the sophisticated software that governs how a drone flies, responds to inputs, and interacts with its environment. Understanding TORR is crucial for anyone looking to build, tune, or deeply customize their FPV racing or freestyle drones, as it offers a level of control and configurability that often surpasses proprietary flight controller software.
The Essence of Flight Control Firmware
At its core, a flight controller (FC) is the brain of a drone. It’s a small circuit board packed with sensors like gyroscopes, accelerometers, magnetometers, and barometers. These sensors provide real-time data about the drone’s orientation, movement, and altitude. The FC’s firmware then processes this data and sends commands to the electronic speed controllers (ESCs), which in turn regulate the speed of the motors. This continuous loop of sensing, processing, and commanding is what allows a drone to stabilize itself in the air, respond to pilot inputs, and execute complex maneuvers.
From Raw Data to Controlled Flight
The process begins with the gyroscopes and accelerometers, which detect any deviation from the desired attitude. If the drone tilts, these sensors register the change. The FC’s firmware compares this real-time data to the target attitude (e.g., level flight, or a specific roll or pitch commanded by the pilot). Based on this comparison, the firmware calculates the necessary adjustments to motor speeds. For example, if the drone tilts to the right, the firmware will increase the speed of the left motors and decrease the speed of the right motors to counteract the tilt and bring it back to level.
Barometers and GPS modules (if equipped) contribute to altitude and position hold, respectively. The barometer measures air pressure to infer altitude, while GPS triangulates the drone’s position using signals from satellites. The firmware integrates this data to maintain a stable altitude and prevent the drone from drifting.
The Role of PID Loops
A fundamental concept in flight control firmware is the Proportional-Integral-Derivative (PID) control loop. This algorithm is the workhorse behind achieving stable and responsive flight. The PID controller works by continuously calculating an “error” value – the difference between the desired state (e.g., level flight) and the current state (e.g., tilted drone). It then applies three types of corrections based on this error:
- Proportional (P): This component provides a correction proportional to the current error. The larger the error, the stronger the corrective action. It’s the primary driver of stabilization.
- Integral (I): This component accounts for past errors. It sums up the error over time. If there’s a persistent small error that the P term isn’t fully correcting, the I term will gradually increase the correction to eliminate it. This helps to overcome steady-state errors, like those caused by wind or slight motor imbalances.
- Derivative (D): This component predicts future errors based on the current rate of change of the error. It aims to dampen oscillations and prevent overshooting the target. If the drone is rapidly approaching its target attitude, the D term will reduce the corrective action to avoid overcorrection and subsequent oscillation.
Tuning these PID values is a critical aspect of FPV drone building. Incorrect PID values can lead to a drone that is sluggish, wobbly, prone to oscillations, or even uncontrollable. Different drone builds, motor types, propeller sizes, and flying styles require different PID configurations.
TORR’s Place in the Firmware Landscape
Before TORR, and even alongside it, there have been other prominent flight controller firmwares. Betaflight, Kiss, and iNav are perhaps the most well-known. Each has its strengths and target audience. Betaflight, for example, is widely adopted for its extensive configurability and open-source nature, making it a favorite among hobbyists and racers who want to fine-tune every aspect of their drone’s behavior. Kiss is known for its simplicity and robust performance, often favored by those who prioritize a plug-and-play experience with excellent flight characteristics. iNav, on the other hand, is geared towards GPS-enabled drones for navigation and autonomous flight.
TORR emerged within this ecosystem, often building upon the foundational concepts of existing firmwares while introducing its own unique approaches and optimizations. Its development is frequently community-driven, with enthusiasts contributing code, testing new features, and sharing their findings.
Key Features and Philosophies of TORR
While specific features can evolve with new releases, TORR is often characterized by:
- Focus on Performance and Responsiveness: TORR is frequently praised for its ability to deliver exceptionally crisp and direct flight characteristics. This is particularly important for FPV pilots who demand immediate feedback and precise control for high-speed racing and acrobatic freestyle maneuvers.
- Advanced Filtering Algorithms: Modern FPV drones operate at very high motor RPMs, which can generate significant vibrations. These vibrations can be picked up by the FC’s sensors, leading to erroneous readings and destabilizing the flight. TORR often implements sophisticated filtering algorithms to effectively isolate the gyro and accelerometer data from these vibrations, resulting in a cleaner and more stable flight. This advanced filtering can also allow pilots to run higher throttle curves and motor outputs without encountering unwanted oscillations.
- Customizable Dynamics: While PID loops are a universal concept, TORR may offer more granular control over how these loops are implemented and interact with other flight dynamics parameters. This allows experienced tuners to sculpt the drone’s feel in the air, making it feel “locked in,” “floaty,” or anything in between, according to their preference.
- Efficient Resource Management: Flight controller hardware, while increasingly powerful, still has limitations in processing power and memory. TORR, like other high-performance firmwares, is designed to be efficient, ensuring that computational resources are utilized effectively to provide fast and reliable control.
- Community-Driven Development: The open-source nature of many popular firmwares means that development is often a collaborative effort. TORR benefits from this, with a dedicated community of users and developers who contribute to its ongoing improvement, bug fixes, and feature additions. This often leads to rapid iteration and adaptation to new hardware and piloting techniques.
Tuning and Configuration with TORR
The true power of a firmware like TORR lies in its configurability. Unlike a pre-built drone with proprietary software, using TORR on a custom-built FPV quadcopter allows for a deep level of personalization.
The Flight Controller Software Interface
Most modern flight controller firmwares, including TORR, are configured using a graphical user interface (GUI) application. This is typically a desktop application that connects to the flight controller via USB. The GUI provides access to a vast array of settings, categorized for ease of use.
Key Configuration Areas
- Ports Tab: Here, you define which serial ports on the FC are used for communication with other components, such as the receiver (for radio control signals), GPS module, and VTX (video transmitter).
- Configuration Tab: This is where fundamental settings are adjusted, including the accelerometer and gyroscope calibration, motor output direction, ESC protocol selection (e.g., DSHOT, Multishot), and arming settings.
- Receiver Tab: This tab allows you to verify that your radio transmitter’s control inputs (throttle, roll, pitch, yaw) are being correctly received by the drone and mapped to the appropriate channels.
- Modes Tab: This is crucial for assigning different flight modes and functionalities to switches on your radio transmitter. Common modes include Arm/Disarm, Angle Mode (self-leveling), Acro Mode (manual control), Horizon Mode (a hybrid), and various OSD (On-Screen Display) toggles.
- Motors Tab: This tab allows you to test each motor individually and verify their direction of rotation. It’s also where you can observe the output signal to each motor, which is useful for diagnostics.
- PID Tuning Tab: This is arguably the most important and complex tab for achieving optimal flight performance. It’s where you adjust the P, I, and D values for each axis (roll, pitch, yaw), as well as other related parameters like feedforward and filtering settings.
- OSD Tab: This allows you to customize the information displayed on your FPV feed, such as battery voltage, flight time, RSSI (Received Signal Strength Indicator), and more.
The Art of PID Tuning
PID tuning is a process that requires patience, a systematic approach, and often, a good understanding of how your drone behaves. TORR, with its advanced filtering capabilities, can sometimes allow for more aggressive PID settings, leading to a very locked-in feel.
Common Tuning Strategies:
- Basic Tuning: Start with default PID values known to be stable for similar builds. Test flight in a safe, open area, focusing on how the drone responds to stick inputs. Observe for oscillations, sluggishness, or wobbles.
- P-Term Adjustment: Gradually increase the P-term until you notice slight oscillations or a “bouncy” feel. Then, back it off slightly. A well-tuned P-term provides responsiveness without being overly aggressive.
- D-Term Adjustment: Increase the D-term to dampen oscillations and improve the drone’s ability to snap back to its desired attitude. However, too much D-term can lead to motor heating and a “jittery” feel, especially at higher throttle.
- I-Term Adjustment: The I-term is typically adjusted last. It helps to eliminate small, persistent errors. Too much I-term can cause “drifting” or “losing trim” over time.
TORR, like other advanced firmwares, may offer advanced features that assist with tuning, such as:
- Dynamic Filtering: Adjusting filtering parameters on the fly based on motor RPM or other flight data.
- Feedforward Control: A mechanism that anticipates the required motor response based on stick inputs, further improving responsiveness.
- RPM Filtering: Specific filters designed to target and eliminate oscillations caused by motor vibrations at their operating frequencies.
The TORR Ecosystem and Community
The TORR firmware doesn’t exist in a vacuum. It is part of a vibrant and interconnected FPV community.
Hardware Compatibility
TORR is typically flashed onto specific flight controller boards that are compatible with it. These are often custom-built FPV quadcopters, ranging from small 2-inch cinematic drones to larger 5-inch or 7-inch racing and freestyle machines. The choice of flight controller hardware is critical, as it needs to have sufficient processing power and the right sensor suite to run TORR effectively.
Community Resources
The FPV community is a treasure trove of knowledge. For TORR users, this translates to:
- Online Forums and Discussion Boards: Platforms where users can ask questions, share their builds and tuning profiles, and troubleshoot issues.
- YouTube Tutorials: Numerous content creators produce in-depth guides on flashing TORR, configuring it, and tuning PID loops. These visual guides are invaluable for beginners.
- GitHub Repositories: The source code for TORR is often hosted on platforms like GitHub, allowing developers to contribute and users to access the latest code.
- Discord Servers: Many FPV communities and specific firmware projects have dedicated Discord servers for real-time communication and support.
The Future of TORR and Flight Control
As drone technology continues to advance, so too will flight controller firmware. We can expect to see:
- Enhanced AI and Machine Learning Integration: Future firmwares may leverage AI to automate complex tasks like PID tuning, obstacle avoidance, and even flight path optimization.
- More Sophisticated Sensor Fusion: Better integration of data from a wider array of sensors (e.g., LiDAR, optical flow) to enable more precise navigation and environmental awareness.
- Improved Efficiency and Performance: Continuous optimization of code to extract maximum performance from existing and future hardware.
- Greater Accessibility: Efforts to make complex configurations more user-friendly without sacrificing the deep customization options that experienced pilots value.
In conclusion, TORR represents a significant contribution to the FPV drone landscape, offering a powerful and highly configurable flight control solution. For pilots seeking the ultimate in responsiveness, precision, and customization, understanding and utilizing firmwares like TORR is not just an option, but a gateway to unlocking the full potential of their aerial machines.