The concept of a “point of inflection” is a fundamental principle in calculus, describing a crucial turning point in the behavior of a function. While its origins lie in pure mathematics, understanding this concept is surprisingly relevant to several advanced areas within flight technology, particularly in the realm of dynamic system analysis, trajectory optimization, and the development of sophisticated control algorithms for unmanned aerial vehicles (UAVs). In essence, a point of inflection signifies where the curvature of a graph changes, moving from concave up to concave down, or vice versa. This subtle yet significant alteration in a function’s shape directly impacts how a system’s rate of change is evolving.
For flight technologists, this translates to understanding how a drone’s velocity, acceleration, or other performance metrics are changing over time or in response to control inputs. A drone’s flight path, its response to aerodynamic forces, or the way its stabilization system compensates for disturbances can all be characterized by functions that exhibit points of inflection. Identifying these points is not merely an academic exercise; it allows for more precise prediction of a UAV’s behavior, smoother control system design, and the optimization of flight maneuvers for efficiency and safety.
The Mathematical Foundation of Inflection Points
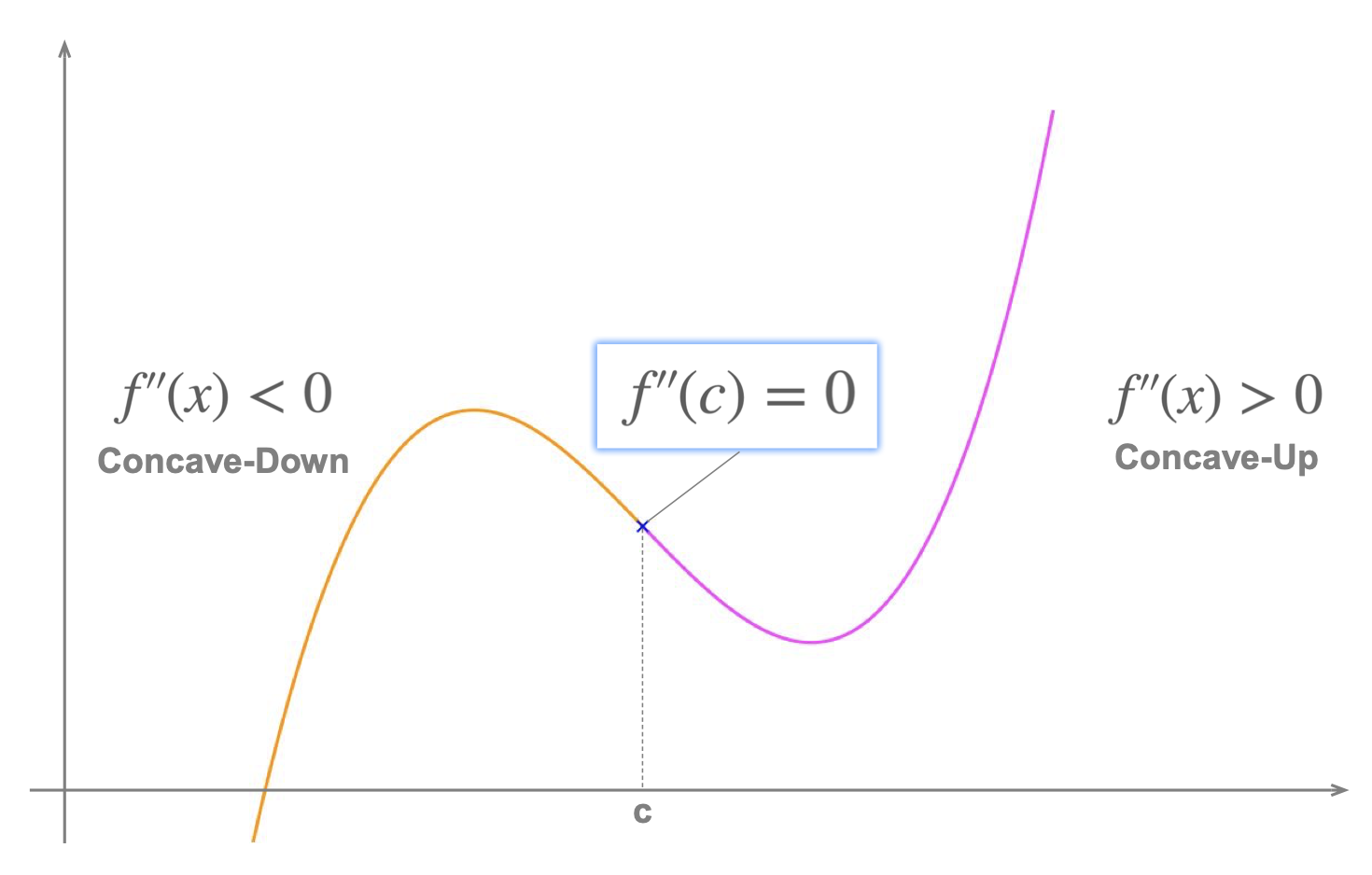
In calculus, a point of inflection is defined as a point on a curve where the second derivative of the function changes sign. Let’s consider a function $f(x)$. The first derivative, $f'(x)$, represents the instantaneous rate of change of the function (its slope), while the second derivative, $f”(x)$, represents the rate of change of the first derivative – essentially, how the slope is changing. This rate of change of the slope is what we refer to as concavity.
- Concave Up: When $f”(x) > 0$, the function is concave up, meaning the slope is increasing. The curve “holds water,” so to speak.
- Concave Down: When $f”(x) < 0$, the function is concave down, meaning the slope is decreasing. The curve “spills water.”
A point of inflection occurs at a value of $x$ where $f”(x) = 0$ or where $f”(x)$ is undefined, and the sign of $f”(x)$ changes around that point. This change in sign is the critical indicator. It means that the function transitions from accelerating its rate of change (concave up) to decelerating its rate of change (concave down), or vice versa.
Identifying Inflection Points
To find points of inflection for a function $f(x)$:
- Calculate the Second Derivative: Determine $f”(x)$.
- Find Critical Points for the Second Derivative: Solve $f”(x) = 0$ for $x$ and identify any points where $f”(x)$ is undefined. These are potential candidates for inflection points.
- Test for Sign Change: For each candidate point $c$, examine the sign of $f”(x)$ in intervals immediately to the left and right of $c$. If the sign of $f”(x)$ changes from positive to negative or negative to positive at $c$, then $(c, f(c))$ is a point of inflection.
Illustrative Example
Consider the function $f(x) = x^3$.
The first derivative is $f'(x) = 3x^2$.
The second derivative is $f”(x) = 6x$.
Setting $f”(x) = 0$, we get $6x = 0$, so $x=0$.
Now, we test the sign of $f”(x)$ around $x=0$:
- For $x < 0$ (e.g., $x = -1$), $f”(-1) = 6(-1) = -6$ (negative, concave down).
- For $x > 0$ (e.g., $x = 1$), $f”(1) = 6(1) = 6$ (positive, concave up).
Since the sign of $f”(x)$ changes at $x=0$, the point $(0, f(0)) = (0, 0)$ is a point of inflection for $f(x) = x^3$. This means that the slope of the tangent line to the curve is decreasing for $x<0$ and increasing for $x>0$, with $x=0$ being the transition point.
Inflection Points in UAV Dynamics and Control
The behavior of a drone is governed by complex physical principles, including aerodynamics, propulsion, and control system responses. Many of these dynamics can be modeled using differential equations whose solutions are functions exhibiting points of inflection.
Trajectory Planning and Optimization
When planning flight paths for drones, especially for complex aerial maneuvers or long-duration missions, optimizing the trajectory is crucial for fuel efficiency, reduced stress on components, and mission success. Trajectories are essentially functions of time, describing the drone’s position, velocity, and acceleration.
Consider the vertical velocity of a drone during a climb. Initially, the motors provide a strong upward thrust, resulting in rapidly increasing positive velocity (high positive acceleration). As the drone reaches a certain altitude or its ascent rate stabilizes, the acceleration might decrease. It’s possible that the acceleration could even become momentarily zero and then negative as the drone adjusts its thrust to maintain a constant velocity or prepare for a transition. The point where the acceleration changes from positive to negative (or vice versa) represents a point of inflection in the velocity profile. This signifies a shift from speeding up its ascent to slowing down its ascent.
Similarly, in horizontal flight, a drone might accelerate to a cruising speed and then decelerate to hover or land. The velocity function over time for such a maneuver will likely contain points of inflection. Flight path optimization algorithms aim to minimize energy expenditure, which often involves smoothing out these transitions. Understanding where the rate of change of acceleration (the jerk, which is the third derivative) is changing rapidly – often coinciding with inflection points in velocity or acceleration profiles – allows for the design of smoother, more energy-efficient paths. For instance, a path that avoids sharp changes in acceleration at inflection points can lead to a more comfortable and efficient flight.
Stabilization System Performance
Drone stabilization systems (gyroscopic stabilizers, accelerometers, flight controllers) are designed to counteract external disturbances and maintain a desired attitude or position. These systems operate in real-time, constantly adjusting control surfaces or motor speeds. The response of a drone to a gust of wind, for example, can be modeled as a dynamic system. The corrective action of the stabilization system, aiming to bring the drone back to its set point, will result in a time-varying response.
Imagine a drone experiencing a sudden pitch perturbation. The stabilization system will apply corrective torque. The angle of pitch over time in response to this perturbation, after the initial disturbance, might exhibit an inflection point. This point would signify where the rate at which the drone is returning to its stable attitude begins to slow down. Before the inflection point, the system is aggressively correcting the disturbance, leading to a rapid change in pitch angle. After the inflection point, the corrective action might be less aggressive, leading to a more gradual return to the desired attitude.
Analyzing the second derivative of the drone’s attitude (e.g., pitch angle) with respect to time can reveal these inflection points. Identifying these points helps in tuning the parameters of the stabilization system (like PID controllers). An inappropriately tuned system might exhibit oscillatory behavior around the point of inflection, or overshoot the stable state. By understanding the inflectional characteristics of the system’s response, engineers can design controllers that provide smoother, more stable, and faster recovery from disturbances.
Aerodynamic Behavior and Maneuverability
The aerodynamic forces acting on a drone are complex and depend on its shape, speed, and angle of attack. The relationship between control inputs (like elevator, aileron, or rudder deflection) and the resulting forces and moments can be highly non-linear. Certain flight regimes or control surface deflections can lead to conditions where the rate of change of aerodynamic forces is itself changing in a significant way.
Consider a maneuver where a drone rapidly changes its angle of attack. The lift and drag forces will change non-linearly with the angle of attack. If we plot lift force as a function of angle of attack, there might be points where the curve’s concavity changes. These points are analogous to inflection points and represent a change in how efficiently the angle of attack is generating lift. For example, beyond a certain angle of attack, the airflow can separate from the wing, drastically reducing lift and increasing drag. The transition into and out of this stall region would likely involve points of inflection in the lift and drag curves.
Understanding these non-linearities, especially at critical angles of attack or during high-G maneuvers, is vital for defining the operational envelope of a drone and ensuring its stability and control throughout all planned flight profiles. Designers use these insights to predict stall behavior, design for maximum maneuverability without compromising stability, and ensure that control inputs have predictable and manageable effects.
Advanced Applications in Flight Technology
The principles associated with inflection points extend to more advanced flight technology applications.
Autonomous Flight and Decision Making
Autonomous drones need to make sophisticated decisions in dynamic environments. This involves predicting the future state of the environment and their own state, as well as planning actions to achieve objectives. Trajectory prediction, for instance, often involves modeling the future motion of other aircraft or dynamic obstacles. If these objects are accelerating or decelerating, their velocity and position functions will have inflection points. Recognizing these points allows the autonomous system to anticipate changes in the object’s trajectory more accurately.
Furthermore, in path planning for complex tasks like search and rescue or environmental monitoring, drones might need to execute specific flight patterns. The efficiency and safety of these patterns are often related to how smoothly the drone transitions between different phases of the mission. For example, transitioning from a high-speed transit to a detailed survey pattern at low speed involves significant changes in acceleration. The functions describing these transitions can exhibit inflection points, and optimizing these transitions to be smooth and energy-efficient is a key aspect of autonomous flight system design.
Sensor Fusion and State Estimation
Modern drones rely on fusing data from multiple sensors (IMUs, GPS, barometers, vision sensors) to estimate their state (position, velocity, attitude). The algorithms used for state estimation often model the underlying physical processes. If the dynamics being modeled exhibit inflection points, the estimation algorithm needs to account for this. For instance, during periods of rapid acceleration or deceleration, the uncertainty in the estimated velocity might change differently than during periods of constant velocity. Understanding the inflectional nature of these dynamics helps in designing more robust and accurate state estimation filters.
Control System Robustness and Stability Analysis
In the formal analysis of control systems, concepts like phase margin and gain margin are used to assess stability. While not directly “points of inflection,” the underlying dynamic equations that govern a system’s response are often analyzed for their stability properties. For systems with non-linearities, such as those encountered in advanced flight control, the behavior around critical operating points might resemble the transition observed at an inflection point. Understanding these non-linear behaviors is crucial for ensuring that the control system remains stable across a wide range of operating conditions and disturbances.
Conclusion
The point of inflection, a concept born in the abstract world of calculus, plays a surprisingly practical role in the sophisticated field of flight technology. From optimizing the intricate dance of a drone’s trajectory to ensuring the robust performance of its stabilization systems and understanding complex aerodynamic behaviors, the identification and analysis of inflection points offer valuable insights. They represent critical transitions in the rate of change of a system’s dynamics, providing engineers with the analytical tools to predict behavior, enhance efficiency, and engineer safer, more capable unmanned aerial vehicles. As drone technology continues to advance into more autonomous and complex operational domains, a deep understanding of these mathematical underpinnings will remain indispensable.