Breadth-First Search (BFS) is a fundamental algorithm in computer science, a cornerstone for solving a wide array of problems, particularly those involving traversing or searching through data structures like graphs and trees. While the term “BFS” might initially sound abstract, its underlying principles are directly applicable and highly relevant to the intricate workings of modern flight technology, especially in areas like navigation, pathfinding, and intelligent autonomous operation. Understanding BFS is crucial for appreciating how drones and other aerial vehicles make decisions, plot courses, and avoid obstacles in complex environments.
In the realm of flight technology, BFS serves as a powerful engine for exploration and discovery. Imagine a drone needing to navigate from point A to point B in a cluttered urban environment. It’s not simply about drawing a straight line; it’s about finding the safest, most efficient, or shortest path while accounting for buildings, other aircraft, weather conditions, and restricted airspace. BFS provides a systematic way to explore all possible routes, layer by layer, ensuring that the optimal solution is found without getting lost in endless recursive loops.

The Core Principles of Breadth-First Search
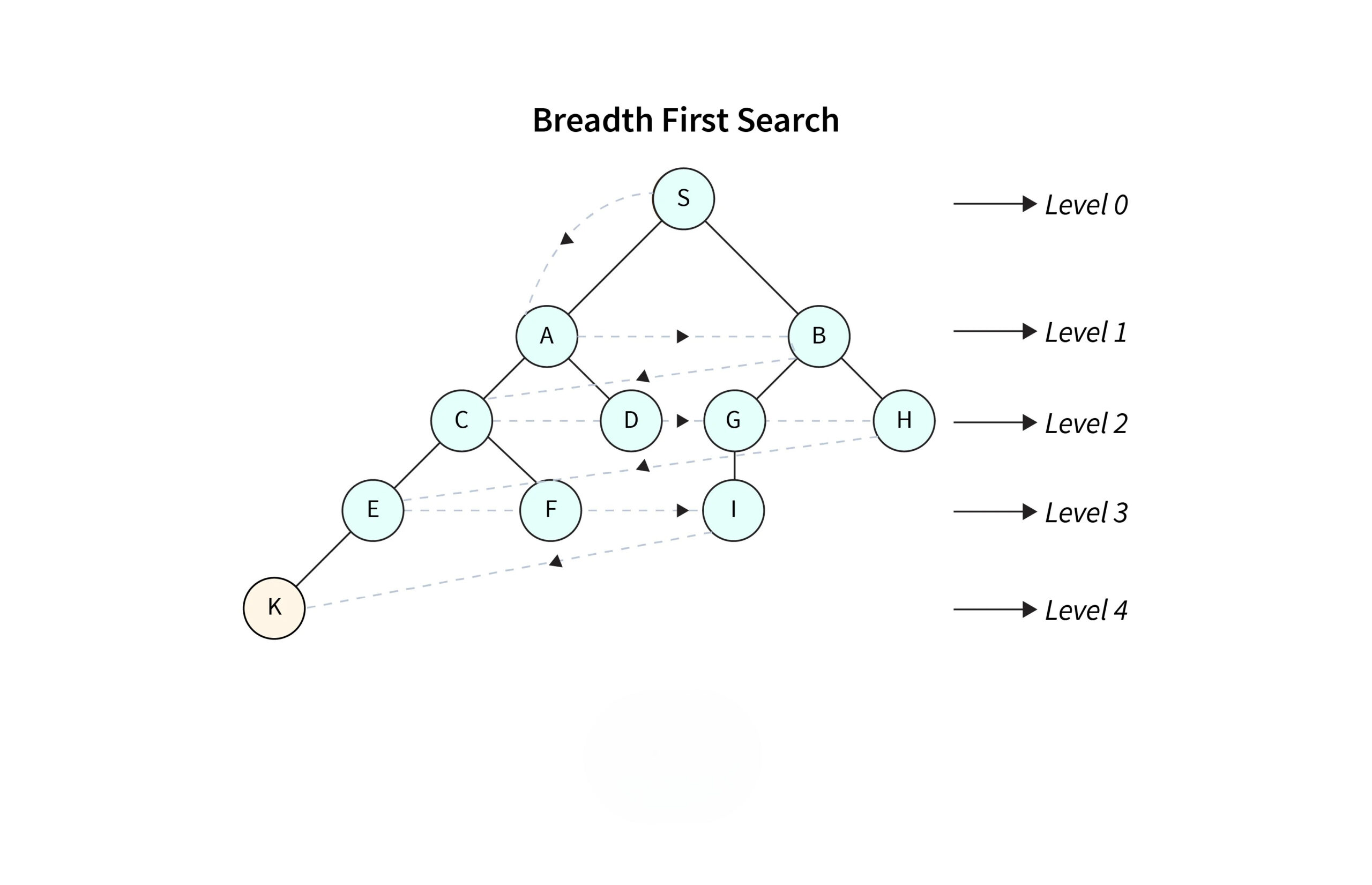
At its heart, BFS operates on the principle of exploring all neighbors at the current “depth” before moving on to the next level of neighbors. Think of it like ripples expanding on a pond; the disturbance spreads outwards evenly.
The Queue: The Engine of Exploration
The primary data structure that powers BFS is a queue. A queue operates on a First-In, First-Out (FIFO) principle. Items are added to the rear (enqueued) and removed from the front (dequeued).
How BFS Unfolds
- Initialization: The process begins with a starting node (or state). This node is added to the queue, and it’s marked as visited to prevent revisiting it.
- Exploration Layer by Layer: While the queue is not empty, the algorithm dequeues a node. This node represents a potential step or location in our search.
- Neighbor Discovery: The algorithm then examines all the unvisited neighbors of the dequeued node. These neighbors represent the immediate possible next steps or locations.
- Enqueue and Mark: Each unvisited neighbor is then enqueued and marked as visited. This ensures that these newly discovered locations are considered in the next “layer” of the search and won’t be processed again.
- Termination: The process continues until the queue is empty (meaning all reachable nodes have been explored) or until a target node (the destination) is found.
Applications in Flight Technology
The abstract concept of exploring nodes and their neighbors translates directly into practical applications for flight systems.
Pathfinding and Navigation
This is perhaps the most intuitive application of BFS in flight technology. When a drone needs to travel from its current location to a designated waypoint, it can be conceptualized as a graph problem.
- Nodes: Represent specific locations or waypoints in the environment. These could be GPS coordinates, points on a map, or even states within a simulated environment.
- Edges: Represent the traversable paths or connections between these nodes. These paths are constrained by physics, environmental factors, and the drone’s capabilities.
BFS systematically explores all possible paths from the starting node to the destination. It first checks all direct routes (neighbors of the start), then all routes that are one step further out, and so on. This guarantees that the shortest path (in terms of the number of “hops” or segments) will be found first. This is critical for mission planning, where efficiency and time are paramount. For instance, in a search and rescue operation, a drone needs to find the quickest way to cover a designated search area. BFS can help determine the most efficient survey pattern.
Obstacle Avoidance
In dynamic and complex environments, a drone must constantly be aware of potential obstacles and find safe ways to maneuver around them. BFS can be employed to find safe routes in real-time.
- State Representation: A “state” can represent the drone’s current position and orientation, along with the configuration of its surroundings (e.g., positions of obstacles).
- Transitions: A “transition” represents a permissible movement the drone can make to a new state without collision.
When an obstacle is detected or the drone enters an unknown area, it can initiate a BFS to find a safe passage. The algorithm explores available movement options, prioritizing those that maintain clearance from detected hazards. If the direct path is blocked, BFS will explore alternative routes, checking for paths that go around the obstacle. This is particularly important for autonomous drones operating in environments like dense forests, urban canyons, or during complex aerial maneuvers.
Mission Planning and Task Allocation
Beyond simple point-to-point navigation, BFS can also be used in more complex mission planning scenarios. Consider a drone tasked with multiple objectives or needing to collect data from various points.
- Task Graph: The relationships between different tasks or data collection points can be represented as a graph.
- Objective Prioritization: BFS can help determine the optimal order in which to complete tasks to minimize travel time or energy consumption, assuming tasks are of equal “weight” or distance.
While more advanced algorithms might be needed for scenarios with varying task priorities or complex dependencies, BFS provides a foundational understanding of exploring interconnected objectives.
Understanding Search Space
The concept of “search space” is fundamental in AI and robotics. For a drone, the search space encompasses all possible states it can be in, from its physical position and orientation to its operational parameters and the state of its environment. BFS is a systematic way to explore this space.
- Graph Representation: The search space can be abstracted as a graph where nodes are possible states and edges are transitions between states.
- Completeness: A key advantage of BFS is its completeness. If a solution (e.g., a path to a destination, a safe maneuver) exists within the search space, BFS is guaranteed to find it. This is a crucial property for reliable autonomous systems.
BFS vs. Other Search Algorithms
While BFS is powerful, it’s not the only search algorithm. Understanding its differences from other common algorithms, like Depth-First Search (DFS), highlights its specific strengths and weaknesses in flight technology contexts.
Depth-First Search (DFS)
DFS explores as far as possible along each branch before backtracking. Instead of a queue, DFS typically uses a stack (or recursion).
- Pros for Flight Tech: Can be more memory-efficient than BFS for very deep search spaces. In some scenarios, it might find a solution faster if that solution is located deep within the search tree.
- Cons for Flight Tech: Does not guarantee finding the shortest path. It can get “stuck” exploring a very long, unproductive path before discovering a much shorter alternative. In navigation, this could mean the drone takes a circuitous route unnecessarily.
For drone navigation, where finding the shortest or most efficient path is often a primary goal, BFS is generally preferred over DFS for its guaranteed optimality in terms of path length.
Dijkstra’s Algorithm and A* Search
These algorithms are more advanced and are often used for pathfinding when edge weights (representing cost, time, or energy) are involved, not just the number of steps.
- Dijkstra’s Algorithm: Finds the shortest path in a graph with non-negative edge weights. It’s essentially BFS with a priority queue that prioritizes nodes with the lowest cumulative cost.
- A* Search: An even more sophisticated algorithm that uses a heuristic function to estimate the cost from a node to the target. This guides the search more effectively towards the goal, making it much faster for many pathfinding problems.
While BFS provides the foundational understanding of layered exploration, Dijkstra’s and A* are often the go-to algorithms for real-world drone pathfinding due to their ability to handle varying costs and their enhanced efficiency. However, the principles of BFS are integral to understanding how these more complex algorithms explore the search space.
Practical Implications for Drone Autonomy
The application of BFS principles extends to the very core of drone autonomy, enabling increasingly sophisticated behaviors.
Intelligent Flight Controllers
Modern flight controllers, the brains of a drone, utilize sophisticated algorithms for navigation, stabilization, and mission execution. BFS, or algorithms derived from its principles, plays a role in:
- Waypoint Navigation: Planning and executing flights between a series of predefined waypoints, ensuring a logical and efficient sequence.
- Return-to-Home (RTH) Functions: Calculating a safe and direct path back to its takeoff point when battery levels are low or communication is lost.
- Geofencing: Establishing virtual boundaries. If a drone approaches a geofence, BFS-like algorithms can help plot the safest course to stay within the allowed area.
Mapping and Surveying
Drones equipped with advanced sensors are used for detailed mapping and surveying of terrain, infrastructure, and environmental sites.
- Coverage Path Planning: For area-coverage tasks (e.g., surveying a field for agriculture or inspecting a pipeline), BFS principles can inform algorithms that determine the most efficient pattern to ensure complete coverage with minimal overlap and travel. The algorithm can explore different traversal patterns layer by layer to find an optimal solution.
Swarm Robotics
In scenarios involving multiple drones working collaboratively, BFS can be adapted for coordination and task allocation within the swarm. While more complex distributed algorithms are typically employed, the underlying concept of systematically exploring possibilities and finding optimal arrangements is rooted in search principles like BFS.

Conclusion
Breadth-First Search, while a fundamental computer science algorithm, is a critical enabler for many advanced functionalities within modern flight technology. From charting the most efficient course through a complex airspace to ensuring a drone can safely navigate around unexpected obstacles, the principles of systematic, layered exploration are indispensable. As drones become more autonomous and operate in increasingly dynamic environments, a solid understanding of algorithms like BFS provides insight into the intelligent decision-making processes that govern their flight. It’s the silent engine driving efficient navigation, robust obstacle avoidance, and the reliable execution of complex aerial missions.