The operating system kernel is the heart of any computer system, from the most powerful supercomputers to the smallest microcontrollers found in advanced drones. In the context of unmanned aerial vehicles (UAVs) and specifically the sophisticated flight controllers and onboard computers that power them, understanding the role of the OS kernel is crucial for appreciating the technology’s capabilities and limitations. While not a direct component of the flight itself, the kernel underpins the software that manages flight, navigation, sensor processing, and communication for drones.
The Kernel’s Fundamental Role in Drone Systems
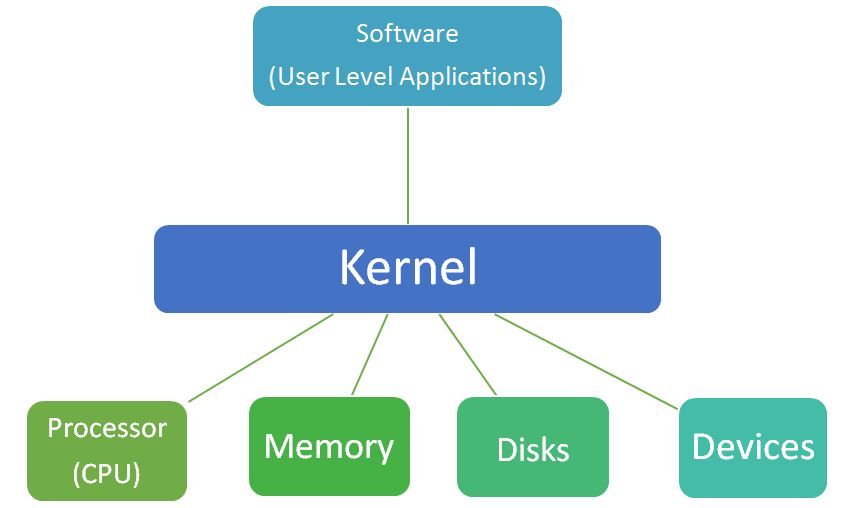
At its core, the OS kernel is a program that has complete control over everything in the system. It acts as an intermediary between the hardware and the software applications that run on the drone’s processing unit. For a drone, this means managing the delicate balance between real-time flight control, sensor data interpretation, communication with the ground station, and potentially advanced features like obstacle avoidance or autonomous navigation.

Resource Management
One of the primary responsibilities of the kernel is managing the system’s resources. This includes the central processing unit (CPU), memory (RAM), and input/output (I/O) devices.
CPU Scheduling
On a drone, the CPU is a highly contested resource. Critical tasks like reading accelerometer and gyroscope data, calculating attitude control, and sending commands to motor controllers require immediate attention. The kernel’s CPU scheduler is responsible for allocating processing time to different tasks, ensuring that high-priority, time-sensitive operations receive the necessary attention without delay. A well-designed scheduler is vital for maintaining stable flight and responsiveness. In real-time operating systems (RTOS), which are often employed in drone flight controllers, the scheduler is typically preemptive and priority-based, guaranteeing that the most critical tasks are always executed.
Memory Management
The kernel also manages the drone’s RAM. This involves allocating memory to different processes, ensuring that one process doesn’t interfere with another’s memory space, and freeing up memory when it’s no longer needed. This is particularly important in drones that might be running complex algorithms for computer vision, mapping, or AI-based flight modes. Efficient memory management prevents crashes and ensures that the system has enough available memory for its operations.
Input/Output (I/O) Management
The kernel handles communication between the CPU and all the peripheral hardware. For a drone, this includes a vast array of sensors (GPS, IMU, barometric pressure, lidar, cameras), actuators (motors), communication modules (Wi-Fi, radio transmitters), and storage devices. The kernel provides standardized interfaces for software to interact with these devices, abstracting away the complexities of the underlying hardware. For instance, when a camera module captures an image, the kernel ensures that the data is correctly transferred to memory and made available to the image processing software.
Process Management and Inter-Process Communication
The kernel is also responsible for creating, managing, and terminating processes – the running instances of programs. In a drone’s embedded system, these processes might range from the low-level firmware that directly controls motor speeds to higher-level applications that interpret sensor data or manage mission planning.
Process Creation and Termination
When a new function is initiated, such as engaging an autonomous flight mode, the kernel creates new processes or threads to handle the associated tasks. Conversely, when a mode is disengaged or an application closes, the kernel cleans up the associated resources. This dynamic management is essential for the flexibility and adaptability of modern drone systems.
Inter-Process Communication (IPC)
Processes often need to communicate with each other to share data and coordinate their actions. For example, the GPS process might need to send location data to the navigation process, which then informs the flight control process. The kernel provides mechanisms for IPC, such as pipes, message queues, and shared memory, enabling seamless collaboration between different software components. This is fundamental for integrated functionalities like “follow me” modes, where the flight controller needs continuous updates from the vision system tracking the subject.
System Calls and the User Space/Kernel Space Divide
A fundamental concept related to the kernel is the division between user space and kernel space. The kernel runs in a privileged mode (kernel space), with direct access to all hardware and memory. Applications, on the other hand, run in user space, with restricted access.
The Role of System Calls
When a user-space application needs to perform a privileged operation, such as reading data from a sensor or sending a command to a motor, it cannot do so directly. Instead, it makes a system call to the kernel. The kernel then performs the requested operation on behalf of the application and returns the result. This separation provides a critical layer of security and stability. It prevents rogue or buggy applications from crashing the entire system or accessing sensitive hardware directly.
For a drone, this means that even a complex AI algorithm attempting to process video feed cannot directly interfere with the low-level flight control routines managed by the kernel, ensuring flight safety. The system call interface is the gateway through which all hardware interactions and system services are accessed, making it a pivotal component of the operating system’s architecture.
Kernel Types and Their Relevance to Drones
Different types of operating system kernels are used in embedded systems, and the choice has significant implications for drone performance.
Monolithic Kernels
In a monolithic kernel architecture, all operating system services, including process management, memory management, device drivers, and system call handling, run in a single, large program in kernel space. While this can lead to higher performance due to direct function calls, a bug in one part of the kernel can bring down the entire system. Some simpler drone flight controllers might utilize a monolithic kernel for its speed and efficiency.
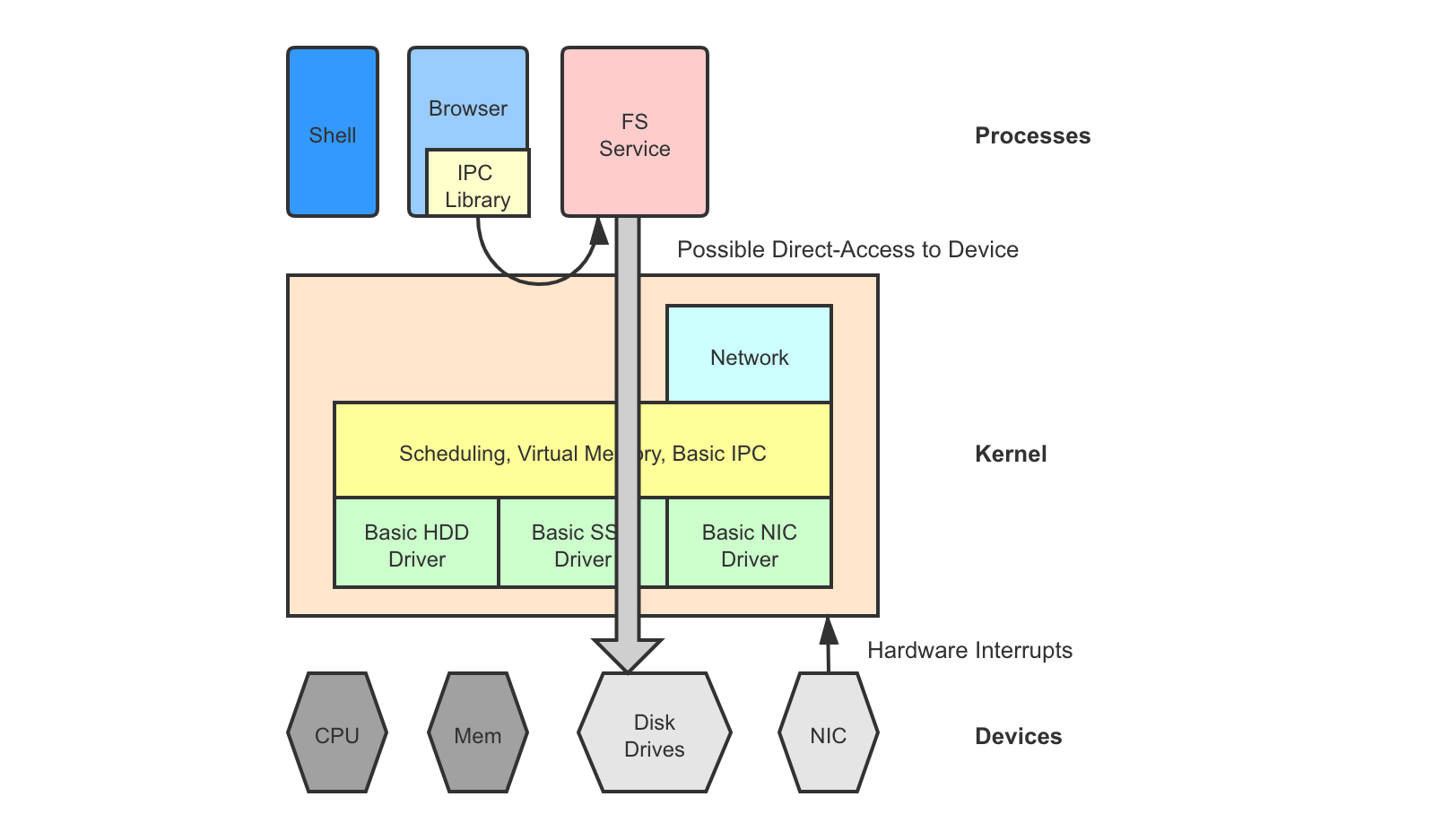
Microkernels
A microkernel architecture, in contrast, aims to keep the kernel as small as possible, providing only the most essential services like inter-process communication, basic memory management, and low-level scheduling. Other services, such as device drivers and file systems, run as user-space processes. This makes the system more modular and resilient, as a failure in a user-space process is less likely to affect the entire kernel. However, it can introduce overhead due to frequent context switching and IPC.
Hybrid Kernels
Many modern operating systems, including those used in more advanced drone platforms, employ a hybrid kernel approach. This combines aspects of both monolithic and microkernels, running essential services in kernel space for performance while moving some less critical components to user space for modularity and stability. This often strikes a good balance for complex embedded systems like those found in professional drones.
Real-Time Operating Systems (RTOS) Kernels
For drones, particularly for flight control, real-time capabilities are paramount. A Real-Time Operating System (RTOS) kernel is designed to process data and events within strict time constraints. This means that tasks are executed with predictable latency and jitter, which is essential for maintaining stable flight, precise navigation, and rapid response to changing conditions. RTOS kernels are characterized by their deterministic scheduling algorithms and minimal overhead, ensuring that critical flight commands are executed precisely when needed.
The Kernel’s Indirect Impact on Drone Capabilities
While the pilot directly interacts with the drone’s flight controller software, and the drone designer specifies the hardware, the kernel is the unseen architect that makes it all possible. It’s the foundation upon which features like:
- Advanced Stabilization: The kernel ensures that sensor data is processed with the low latency required for smooth, stable flight, even in windy conditions.
- Autonomous Navigation: Complex algorithms for pathfinding, waypoint following, and geofencing rely on the kernel for reliable access to GPS, IMU, and other navigation sensors.
- Computer Vision and AI: Image processing for object detection, tracking, and obstacle avoidance depends on the kernel’s ability to efficiently manage the flow of data from cameras and other sensors to the processing units.
- Communication Reliability: The kernel manages the communication stacks that allow the drone to maintain a stable connection with the ground station for telemetry and control.
In essence, the OS kernel is the silent, indispensable enabler of all the sophisticated functionalities that define modern drones. Its efficient and robust operation is a prerequisite for safe, reliable, and advanced aerial operations.