The Instantaneous Rate of Change
At its core, a derivative in calculus represents the instantaneous rate of change of a function at a specific point. Imagine you’re observing the flight path of a drone. The drone’s position isn’t static; it’s constantly changing over time. If you want to know how fast the drone is moving at a particular moment, you’re looking for its instantaneous velocity. This is precisely what a derivative helps us calculate.
Consider a function $f(x)$ that describes a certain quantity. The derivative of this function, denoted as $f'(x)$ or $frac{dy}{dx}$, quantifies how much the output of the function, $y$, changes in response to an infinitesimally small change in its input, $x$. In the context of drone flight, if $f(t)$ represents the drone’s altitude at time $t$, then $f'(t)$ would represent its vertical velocity at that exact moment.
Understanding the Limit Definition
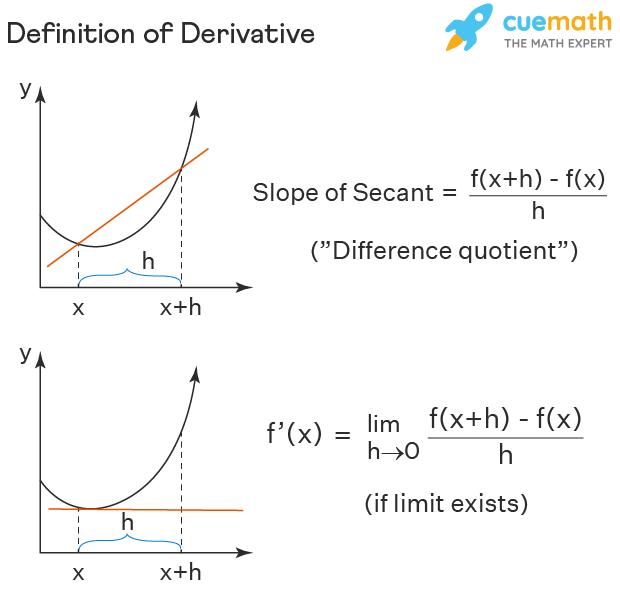
The formal definition of a derivative relies on the concept of a limit. For a function $f(x)$, its derivative at a point $a$ is defined as:
$f'(a) = lim_{h to 0} frac{f(a+h) – f(a)}{h}$
Let’s break this down. The term $frac{f(a+h) – f(a)}{h}$ represents the average rate of change of the function between the point $a$ and a point infinitesimally close to it, $a+h$. As $h$ approaches zero ($h to 0$), this average rate of change becomes the instantaneous rate of change, which is the derivative.
For our drone example, let $f(t)$ be the drone’s altitude at time $t$. The term $frac{f(t+Delta t) – f(t)}{Delta t}$ is the average rate of change of altitude over a small time interval $Delta t$. As $Delta t$ gets smaller and smaller, approaching zero, this average rate becomes the instantaneous vertical velocity of the drone at time $t$.
Visualizing the Derivative: The Tangent Line
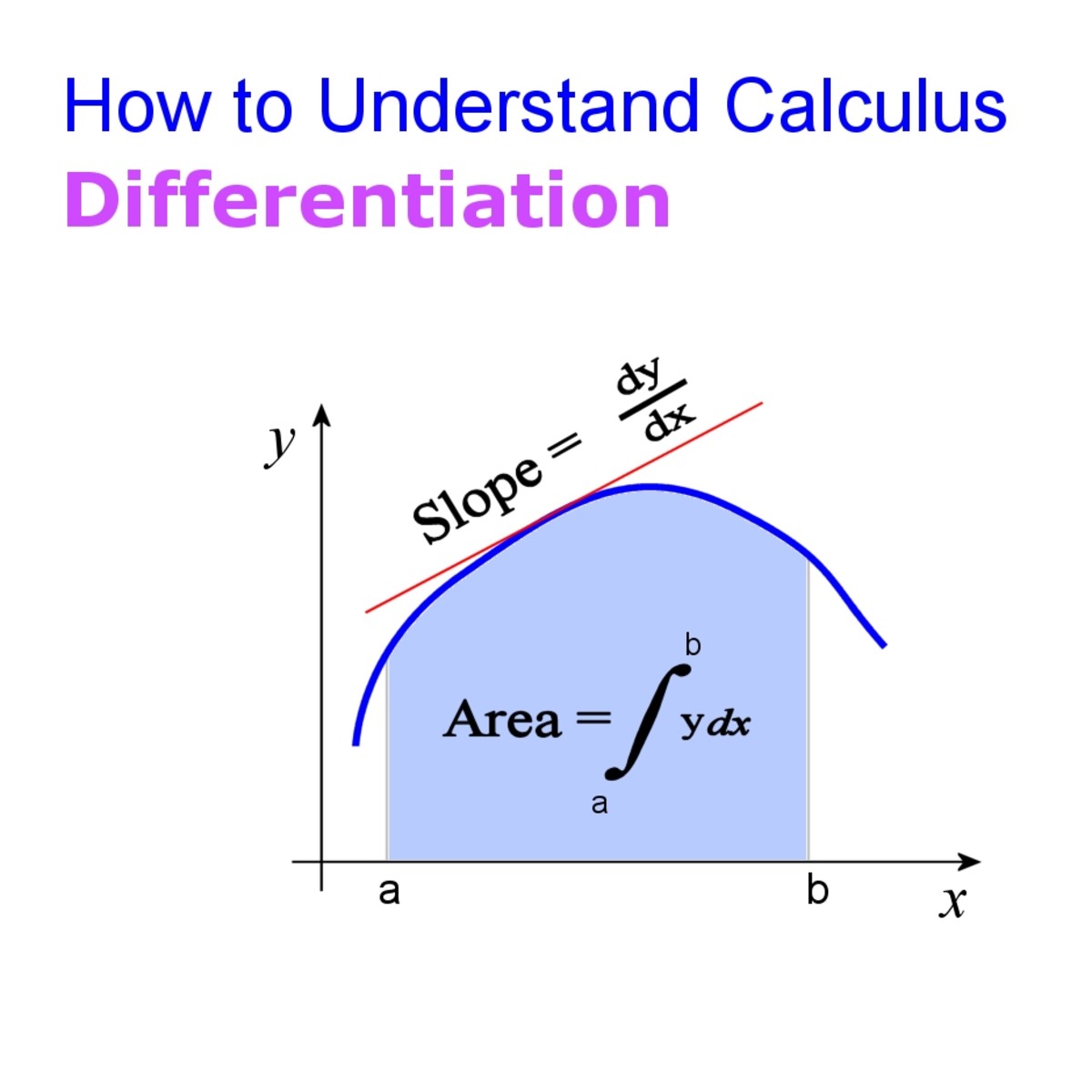
Geometrically, the derivative of a function at a point is the slope of the tangent line to the graph of the function at that point.
Imagine plotting the altitude of a drone over time. The resulting curve represents its flight path. If you pick a specific point in time on this curve, the tangent line is a straight line that just “kisses” the curve at that single point, sharing its slope at that exact location. The slope of this tangent line is the value of the derivative at that time.
A steep upward slope of the tangent line indicates a rapid increase in altitude (climbing fast). A downward slope signifies a descent (descending). A horizontal tangent line would mean the drone is momentarily holding its altitude. This visual interpretation makes the abstract concept of instantaneous rate of change more tangible.
Applications in Flight Technology
The concept of derivatives is not merely an abstract mathematical curiosity; it forms the bedrock of many critical systems in modern flight technology, particularly for drones. Understanding and calculating derivatives allows for precise control, navigation, and stabilization.
Velocity and Acceleration
As mentioned, the derivative of position with respect to time gives us velocity. For a drone, this applies to its position in three-dimensional space. If we have a function $mathbf{r}(t) = langle x(t), y(t), z(t) rangle$ representing the drone’s position vector at time $t$, then its velocity vector is:
$mathbf{v}(t) = mathbf{r}'(t) = langle x'(t), y'(t), z'(t) rangle$
Here, $x'(t)$, $y'(t)$, and $z'(t)$ represent the instantaneous rates of change of the drone’s position along the x, y, and z axes, respectively.
Furthermore, the derivative of velocity with respect to time gives us acceleration. Acceleration is crucial for understanding how forces are affecting the drone’s motion.
$mathbf{a}(t) = mathbf{v}'(t) = mathbf{r}”(t) = langle x”(t), y”(t), z”(t) rangle$
The acceleration vector dictates how the drone’s velocity is changing. For instance, applying thrust to the motors directly influences the drone’s acceleration. Control systems use these derivatives to command motor speeds and angles to achieve desired trajectories and maintain stability.
Stabilization Systems
Drone stabilization systems are perhaps the most direct beneficiaries of differential calculus. Gyroscopes and accelerometers provide raw data about the drone’s orientation and movement. However, this data needs to be processed to counteract external forces like wind or to recover from disturbances.
- Attitude Control: A drone’s attitude refers to its orientation (pitch, roll, yaw). If a gust of wind causes the drone to tilt (change its pitch or roll), sensors detect this deviation. The stabilization system calculates the rate of change of this tilt (angular velocity) using derivatives. This rate of change information is fed into a Proportional-Integral-Derivative (PID) controller.
- PID Controllers: PID controllers are ubiquitous in control systems. They use three components:
- Proportional (P): Responds to the current error (how far the drone is from its desired orientation).
- Integral (I): Accumulates past errors to eliminate steady-state errors.
- Derivative (D): Responds to the rate of change of the error. This component is crucial for damping oscillations and preventing overshooting. By looking at how quickly the drone is deviating, the derivative term can anticipate the future error and apply counter-forces before the deviation becomes too large. This is where the derivative’s predictive power is invaluable.
Without the ability to calculate the rate of change of attitude deviations (the derivative of the error), stabilization systems would be sluggish and prone to oscillations, leading to an unstable flight.
Navigation and Trajectory Planning
While GPS provides position data, precise navigation often requires more than just knowing “where you are.” It involves understanding “how you are getting there.”
- Path Following: When a drone is programmed to follow a specific flight path, control systems need to ensure it stays on course. If the drone deviates from the planned path, the system calculates the error in its position and velocity relative to the desired path. The derivative of this error helps in adjusting the control inputs to steer the drone back onto the intended trajectory.
- Smooth Maneuvers: Planning a smooth ascent, descent, or turn involves ensuring that velocity and acceleration profiles are continuous and well-behaved. Calculus allows engineers to define these smooth trajectories. For example, defining a smooth vertical ascent might involve ensuring the vertical velocity ($h'(t)$) increases gradually and the vertical acceleration ($h”(t)$) also changes smoothly, preventing jerky movements that could destabilize the drone or create undesirable cinematic effects.
Advanced Concepts and Further Exploration
The power of derivatives extends beyond simple rates of change. They are foundational to understanding more complex phenomena and developing sophisticated algorithms.
Higher-Order Derivatives
We’ve discussed first derivatives (velocity from position, rate of change of error) and second derivatives (acceleration from velocity). However, we can continue taking derivatives.
- Third Derivative (Jerk): The third derivative of position with respect to time is known as “jerk.” Jerk measures the rate of change of acceleration. While often overlooked in simpler applications, jerk is important in applications where smooth motion is paramount, such as high-speed robotic arm movements or ensuring passenger comfort in autonomous vehicles. For drones, controlling jerk can lead to exceptionally smooth aerial footage by minimizing abrupt changes in acceleration.
- Fourth Derivative (Snap/Jounce): The fourth derivative, snap or jounce, measures the rate of change of jerk. While rarely encountered in basic drone control, these higher-order derivatives play roles in advanced control theory and simulations where very fine-grained motion control is required.
Derivatives in Optimization
Many tasks in drone operation involve optimization – finding the best way to achieve a goal. Derivatives are indispensable tools for this.
- Mapping and Surveying: When drones are used for aerial mapping, algorithms often aim to minimize flight time or maximize coverage efficiency. Optimization techniques, which rely heavily on derivatives, are used to find the most efficient flight paths. For example, finding the optimal angle for a camera to capture a specific area with minimal overlap might involve finding the minimum of a cost function, a process where derivatives are used to locate the minimum.
- Resource Management: In fleet management or battery life optimization, derivatives can help determine the optimal operating parameters to maximize mission duration or minimize energy consumption.
Numerical Differentiation
In real-world drone systems, we don’t always have a perfect, continuous mathematical function describing every aspect of motion. Instead, we have discrete sensor readings taken at specific time intervals. Numerical differentiation techniques are used to approximate derivatives from this discrete data.
- Finite Differences: The simplest form of numerical differentiation is using finite differences. For example, approximating the velocity at time $ti$ might involve using the positions at $ti$ and $t{i+1}$: $v(ti) approx frac{s(t{i+1}) – s(ti)}{t{i+1} – ti}$. More sophisticated methods, like central differences, can provide better approximations.
- Filtering and Smoothing: Raw sensor data can be noisy. Before applying numerical differentiation, data is often passed through filters (like a Kalman filter) to smooth it out, ensuring that the calculated derivatives are more reliable and less susceptible to noise-induced fluctuations.
In essence, derivatives provide the language and the tools to understand and control the dynamic world of drone flight. From the fundamental concept of how quantities change moment by moment to their application in sophisticated control systems and optimization algorithms, calculus, and specifically the derivative, is an invisible yet indispensable force behind every stable, precise, and capable drone.