The ubiquitous presence of springs in countless mechanical systems, from the suspension in our vehicles to the delicate mechanisms within our smartphones, underscores their fundamental importance. In the realm of flight technology, particularly within the intricate designs of unmanned aerial vehicles (UAVs), understanding and accurately quantifying the properties of springs is not merely an academic exercise but a critical design consideration. The “spring constant,” often denoted by the symbol k, is a fundamental parameter that defines a spring’s stiffness – its resistance to deformation under an applied force. A thorough grasp of this concept is paramount for engineers designing stabilization systems, control surfaces, and even the payload integration mechanisms that enable UAVs to perform their diverse missions.
This article delves into the concept of the spring constant, its significance in the context of flight technology, and the methodologies employed for its determination. We will explore how variations in spring constant can directly impact a UAV’s flight characteristics, responsiveness, and overall operational efficiency.
The Fundamental Nature of the Spring Constant
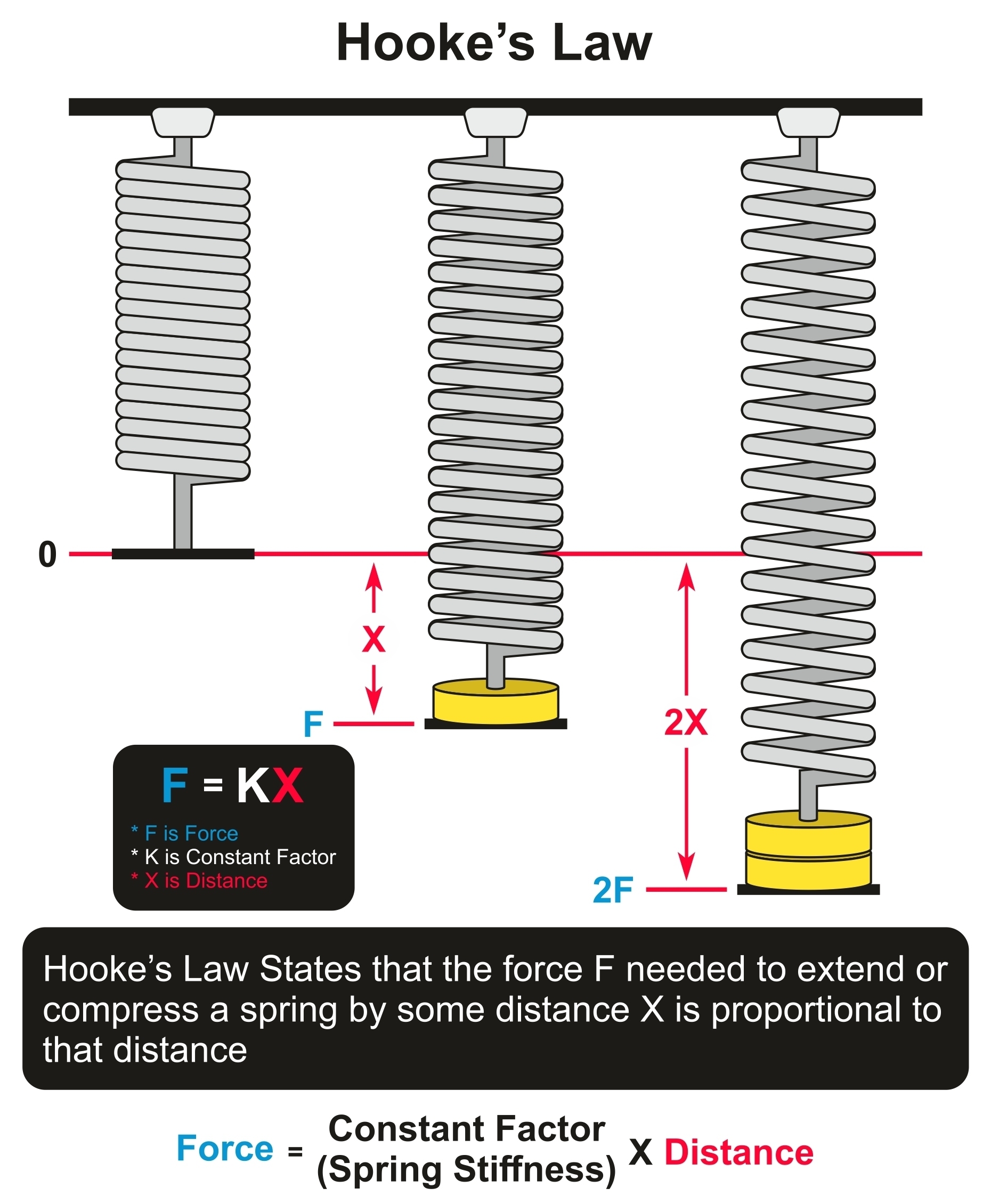
At its core, the spring constant is a proportionality constant that relates the force exerted by a spring to its displacement from its equilibrium position. This relationship is elegantly described by Hooke’s Law, a fundamental principle in physics named after Robert Hooke. Hooke’s Law states that the force F needed to extend or compress a spring by some distance x is proportional to that distance. Mathematically, this is expressed as:
$F = -kx$
The negative sign indicates that the force exerted by the spring is always in the opposite direction of the displacement. If you pull a spring further out (positive displacement), it pulls back (negative force). Conversely, if you push it further in (negative displacement), it pushes back outwards (positive force). The spring constant, k, is therefore a measure of the spring’s inherent stiffness. A higher value of k signifies a stiffer spring, requiring a greater force to produce the same amount of displacement. Conversely, a lower k value indicates a softer, more compliant spring.
Units and Measurement
The standard unit for the spring constant in the International System of Units (SI) is Newtons per meter (N/m). This means that for every meter of displacement from its equilibrium position, the spring exerts a force of k Newtons. In imperial units, it might be expressed in pounds per inch (lb/in).
Factors Influencing Spring Constant
Several physical properties of a spring dictate its spring constant:
- Material: The Young’s modulus of the material from which the spring is made is a primary determinant. Materials with higher Young’s moduli, such as spring steel, will generally result in stiffer springs.
- Wire Diameter: A thicker wire will inherently be more resistant to bending and stretching, leading to a higher spring constant.
- Coil Diameter: The diameter of the coils affects the lever arm through which forces are applied. A larger coil diameter generally leads to a lower spring constant for a given wire diameter and number of coils.
- Number of Active Coils: The more active coils a spring possesses, the more length is available for deformation, resulting in a lower spring constant.
- Spring Geometry: The overall shape and configuration of the spring (e.g., helical, conical, torsion) also play a role in determining its behavior and, consequently, its spring constant.
Significance in Flight Technology
In the sophisticated world of UAVs, springs are not mere passive components; they are integral to the dynamic behavior of the aircraft. The precise control and stability that modern UAVs exhibit are often the result of meticulously engineered systems, where the spring constant of various components plays a crucial role.
Stabilization Systems
One of the most critical applications of springs in flight technology is within stabilization systems, particularly in gimbals and camera mounts. Gimbals are designed to keep a camera level and steady despite the movements of the drone. They often employ motors and control algorithms, but the initial resistance to unwanted motion and the return to a stable position can be significantly influenced by integrated springs.
-
Damping and Oscillations: A spring with an inappropriate constant can lead to over-dampening or under-dampening of oscillations. If a spring is too stiff (high k), it might resist small, necessary movements, leading to jerky footage or inefficient stabilization. If it’s too soft (low k), it might allow excessive movement, failing to adequately dampen vibrations or external forces, thus compromising image quality and stability. The ideal spring constant balances responsiveness with stability, ensuring smooth operation.
-
Payload Integration: When attaching payloads, the spring’s ability to absorb shock and distribute load is vital. For instance, in systems that mount sensitive sensors or communication equipment, springs with carefully selected constants can mitigate the impact of rough landings or turbulent flight, protecting the delicate electronics.
Control Surface Actuation and Feedback
While many modern UAVs utilize direct motor control for their control surfaces (e.g., ailerons, elevators, rudders on fixed-wing drones), some systems might incorporate spring-based mechanisms for feedback or for passive aerodynamic adjustments. In such scenarios, the spring constant directly influences how quickly and forcefully a control surface can react to pilot input or environmental changes. A higher spring constant would mean a more rigid control surface, requiring more force to deflect, potentially leading to less responsive flight. A lower spring constant would allow for easier deflection, offering greater agility but potentially sacrificing precision at higher speeds or in gusty conditions.
Landing Gear and Shock Absorption
For larger or heavier UAVs, robust landing gear is essential to absorb the impact of landings and prevent damage to the airframe and its components. Springs are frequently employed within these landing gear systems to provide the necessary shock absorption.

-
Impact Dissipation: The spring constant of the landing gear springs directly determines how much force is transmitted to the drone’s structure during landing. A spring with an optimal k value will compress sufficiently to absorb the kinetic energy of the landing impact, gradually dissipating it, rather than transferring the full shock load. If the spring is too stiff, the impact forces could be detrimental. If it’s too soft, the landing gear might bottom out, offering insufficient protection.
-
Ground Handling: The spring constant also influences how the UAV handles on the ground. A well-tuned landing gear system with appropriate spring constants can allow the drone to roll smoothly over uneven terrain and maintain stability during taxiing.
Vibration Dampening
UAVs, by their very nature, generate vibrations from their propulsion systems. These vibrations can degrade sensor performance, interfere with control systems, and, in the case of cameras, result in blurry or unstable imagery. Springs are often incorporated into mounts for motors, batteries, and sensitive electronics specifically to dampen these vibrations.
- Frequency Response: The spring constant, along with the mass of the component being isolated, determines the natural resonant frequency of the vibration dampening system. Engineers aim to design these systems such that the natural frequency is significantly different from the dominant frequencies of the vibrations produced by the drone’s motors. A spring with the correct constant can effectively isolate the protected component from the disruptive vibrations.
Methods for Determining the Spring Constant
Accurately knowing the spring constant is crucial for effective design and optimization. Fortunately, several methods exist for its determination, ranging from simple experimental setups to more sophisticated analytical approaches.
Experimental Determination
The most straightforward method for determining the spring constant is through direct experimentation. This involves applying known forces to the spring and measuring the resulting displacements.
Hooke’s Law Experiment
- Setup: Securely attach the spring to a fixed point. Hang a known mass (which can be converted to a force using $F = mg$, where g is the acceleration due to gravity) from the free end of the spring. Ensure the spring is allowed to come to rest at its equilibrium position.
- Measurement: Measure the displacement of the free end of the spring from its initial unstretched or uncompressed position.
- Calculation: Repeat this process with several different masses, thereby applying a range of forces. For each force F and corresponding displacement x, the spring constant can be calculated using the rearranged Hooke’s Law formula: $k = F/x$. Averaging the values obtained from multiple measurements will yield a more reliable spring constant.
Using a Force Sensor and Displacement Transducer
A more precise experimental approach involves using a digital force sensor and a displacement transducer (like a linear encoder or a sophisticated motion capture system).
- Setup: Attach the spring between the force sensor and a mechanism that can precisely control and measure displacement (e.g., a motorized stage).
- Data Acquisition: Apply a controlled force using the force sensor or induce displacement using the stage and record corresponding force-displacement data.
- Analysis: Plot the force versus displacement data. The slope of this linear relationship will directly represent the spring constant k. This method allows for the capture of a continuous curve, revealing any non-linearities in the spring’s behavior, which can occur beyond its elastic limit.
Analytical Calculation
When the detailed specifications of a spring are known, its spring constant can be calculated analytically using established formulas. For a helical compression or extension spring, a common approximation for the spring constant is:
$k = frac{G d^4}{8 D^3 N}$
Where:
- $k$ is the spring constant
- $G$ is the shear modulus of the spring material
- $d$ is the diameter of the spring wire
- $D$ is the mean coil diameter
- $N$ is the number of active coils
Each of these parameters can be measured or obtained from material specifications. The shear modulus ($G$) is related to the material’s Young’s modulus ($E$) and Poisson’s ratio ($nu$) by $G = E / (2(1 + nu))$. This formula provides a theoretical estimate of the spring constant, which can then be validated through experimental testing.
Conclusion
The spring constant is a fundamental metric that dictates the stiffness and responsiveness of a spring. In the sophisticated domain of flight technology, understanding and accurately quantifying this parameter is not a trivial matter. It directly influences the performance of stabilization systems, the effectiveness of shock absorption in landing gear, and the overall dynamic behavior of UAVs. By employing rigorous experimental methods and leveraging analytical calculations, engineers can precisely determine the spring constant of critical components. This ensures that UAVs are designed for optimal stability, agility, and resilience, ultimately enabling them to perform their increasingly complex missions with greater precision and reliability. The humble spring, characterized by its seemingly simple spring constant, thus plays a pivotal role in the advancement of aerial robotics.