In the realm of drone technology, while the direct application of set theory’s union operation might not be immediately apparent in the physical components of a drone, its underlying principles of combining and encompassing information are fundamental to many advanced functionalities. When we discuss how drones process data, integrate sensor inputs, or manage mission parameters, the conceptual framework of a union becomes highly relevant. Understanding this mathematical concept can illuminate how complex drone systems achieve sophisticated behaviors, particularly in areas like navigation, data fusion, and intelligent flight planning.
The Mathematical Foundation: Understanding Set Union
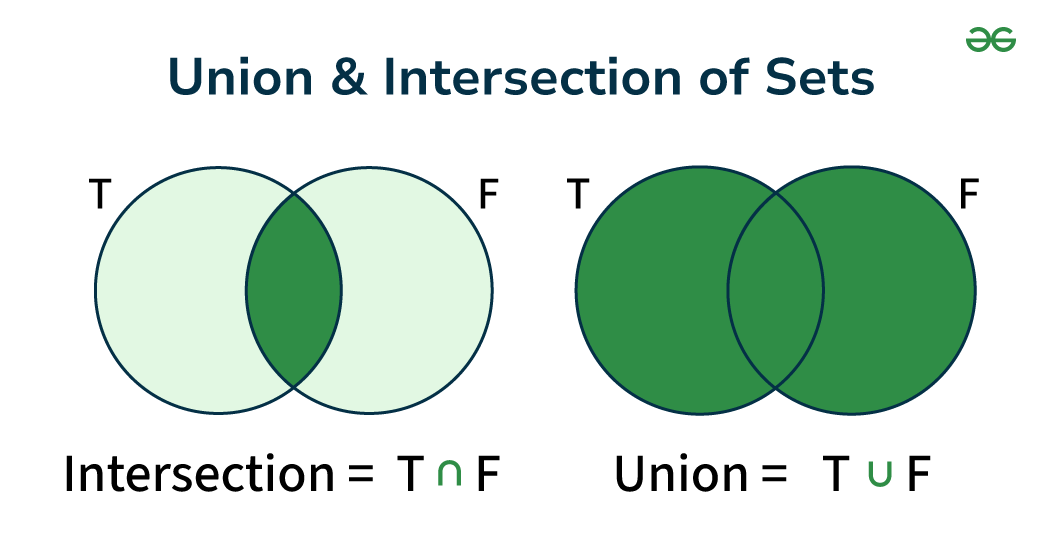
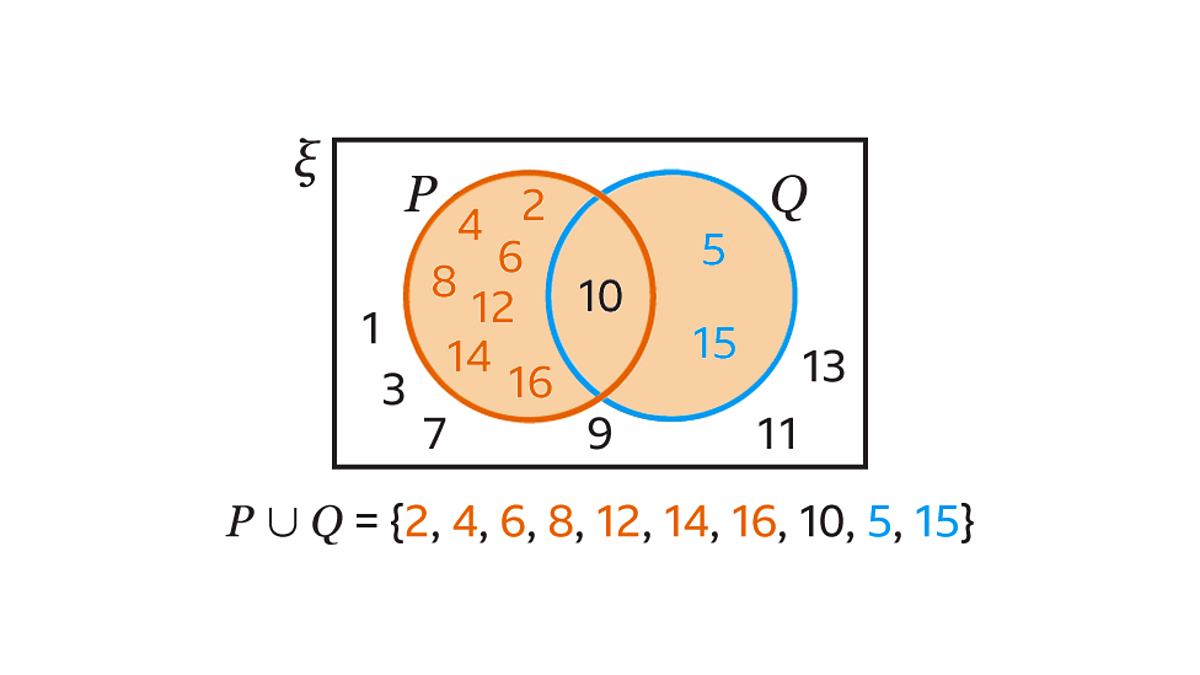
At its core, the union of two sets is a fundamental operation in set theory. It results in a new set that contains all the elements from both original sets, without any duplication. If we have two sets, A and B, their union (denoted as $A cup B$) is the set of all elements that are in A, or in B, or in both.
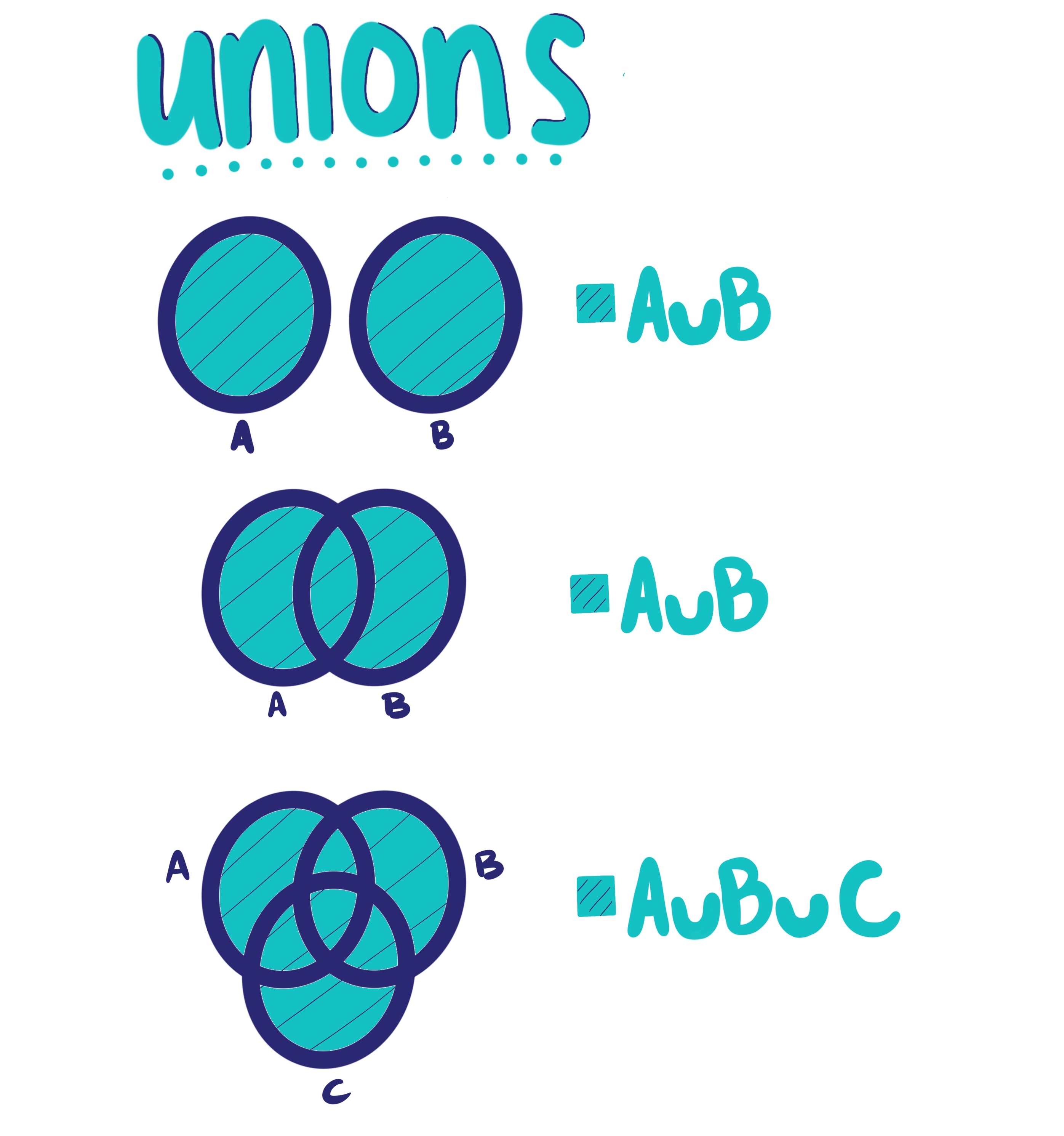
For instance, consider set A = {red, blue, green} and set B = {blue, yellow, orange}. The union of A and B, $A cup B$, would be {red, blue, green, yellow, orange}. The element ‘blue’ appears in both sets, but it is only listed once in the union. This principle of combining and encompassing distinct pieces of information is precisely what advanced drone systems perform, albeit in a digital and algorithmic fashion.
Applications in Drone Data Fusion and Sensor Integration
One of the most pertinent applications of the union concept in drone technology lies within data fusion and sensor integration. Modern drones are equipped with a multitude of sensors, each providing a unique perspective and type of data. These can include GPS receivers, Inertial Measurement Units (IMUs) comprising accelerometers and gyroscopes, barometers for altitude, magnetometers for heading, LiDAR scanners for environmental mapping, optical cameras for visual data, and thermal sensors for heat detection.
Each of these sensors can be thought of as contributing to a unique “set” of data points or readings at any given moment. For a drone to navigate accurately, understand its environment, and perform complex tasks, it needs to synthesize this disparate information into a coherent operational picture. The process of data fusion is analogous to taking the union of these individual sensor data sets.
GPS and IMU Data Combination
Consider a drone’s navigation system. The GPS provides global positioning coordinates, which are essential for determining the drone’s absolute location. However, GPS signals can be intermittent or suffer from multipath interference, leading to occasional inaccuracies. An IMU, on the other hand, provides high-frequency measurements of the drone’s acceleration and angular velocity. While the IMU is excellent at tracking short-term changes in motion and orientation, its measurements drift over time, leading to accumulated errors.
To achieve robust and accurate positioning, the drone’s flight controller fuses data from both the GPS and the IMU. The GPS data can be seen as one set of position and velocity information, and the IMU data, when integrated over time, contributes another set of motion parameters. The fusion algorithm effectively takes a “union” of this information, using the strengths of each sensor to compensate for the weaknesses of the other. The GPS acts as a periodic correction to the IMU’s drift, while the IMU provides smooth, high-rate motion data between GPS updates. This combined, richer dataset allows for a more stable, accurate, and responsive flight.
Environmental Sensing and Mapping
In the context of mapping and environmental sensing, the concept of union is even more evident. A drone equipped with LiDAR might generate a point cloud representing the 3D structure of its surroundings. Simultaneously, an optical camera captures high-resolution imagery of the same environment.
Let’s conceptualize the LiDAR point cloud as Set L, containing points $(x, y, z)$ representing surfaces and objects. The optical camera, in turn, generates a set of image pixels, Set P, each associated with a color value and a corresponding $(u, v)$ coordinate in the image plane. To create a georeferenced, visually rich 3D model, the drone’s software needs to integrate these two data streams.
The process involves projecting the LiDAR points into the camera’s image plane or, conversely, using the camera’s image data to colorize the 3D LiDAR point cloud. This creates a unified representation where each 3D point $(x, y, z)$ also carries color information from the optical image. This is akin to forming the union of two sets of information: the geometric data from LiDAR and the visual data from the camera. The resulting fused dataset is more informative than either individual dataset, enabling applications like detailed site surveying, infrastructure inspection, and virtual reality environment creation.
Autonomous Flight and Mission Planning: A Union of Objectives and Constraints
The “union of a set” also finds a conceptual parallel in the decision-making processes underlying autonomous flight and sophisticated mission planning. A drone’s mission is often defined by a set of objectives and a set of constraints.
Objectives
The objectives might include:
- Coverage: Surveying a specific geographical area.
- Inspection: Examining particular points of interest (e.g., structural defects on a bridge).
- Delivery: Transporting a payload to a designated location.
- Monitoring: Continuously observing a dynamic situation.
Constraints
The constraints, on the other hand, define the boundaries within which these objectives must be met:
- Flight Time: Battery limitations dictate how long the drone can operate.
- Geofencing: Forbidden zones or areas that must be avoided.
- Airspace Regulations: Altitude limits, proximity to airports, etc.
- Payload Capacity: Weight and volume limitations of what the drone can carry.
- Terrain: Obstacles and topography that must be navigated safely.
Autonomous flight systems aim to achieve the union of these objectives and constraints. The mission planner needs to generate a flight path that satisfies all the desired objectives while adhering to all the specified constraints. This is not simply about maximizing one aspect; it’s about finding a solution that encompasses the totality of what needs to be done and what must be avoided.
The algorithms used for path planning, such as optimization algorithms or search-based methods, effectively explore a solution space. Each potential flight path can be viewed as a “set” of waypoints, altitudes, and speeds. The algorithm searches for a path that belongs to the “set” of valid paths (satisfying constraints) and also achieves the “set” of desired outcomes (fulfilling objectives). The optimal flight plan is one that represents a successful union of all these requirements.
AI Follow Modes and Intelligent Obstacle Avoidance
Even simpler autonomous features, like AI follow modes or intelligent obstacle avoidance, can be understood through this lens. When a drone is in “follow me” mode, it aims to maintain a specific relative position to a target object (the objective). However, it must simultaneously adhere to a set of environmental constraints – avoiding collisions with trees, buildings, or other drones.
The drone’s perception system continuously identifies potential obstacles. Each detected obstacle can be considered an element that must not be part of the drone’s path. The flight control system’s task is to generate a path that is the “union” of the desired follow path and the exclusion of all detected obstacles. If the drone were to simply focus on following the target without considering obstacles, it would quickly crash. Conversely, if it only focused on avoiding obstacles without pursuing the follow objective, it wouldn’t be performing its intended function. The intelligent behavior emerges from the system’s ability to reconcile and combine these distinct sets of requirements.
Implications for System Design and Development
The conceptual understanding of the union of sets is not merely an academic exercise for drone developers; it directly influences how complex systems are architected and programmed.
Modular Design and System Integration
When designing advanced drone platforms, engineers often adopt a modular approach. Different subsystems (e.g., navigation, perception, control, communication) are developed independently but must seamlessly integrate. The data and commands exchanged between these modules can be thought of as elements belonging to specific data sets. The interfaces between modules are designed to allow for the efficient combination of this information, akin to forming a union. For instance, the command module might send control signals to the propulsion system. These signals are generated based on fused sensor data and mission commands. The propulsion system’s “set” of possible actions must be compatible with the commands provided by the control system.
Software Architecture
The software architecture of a drone’s flight control system often employs architectures like the Robot Operating System (ROS) or proprietary real-time operating systems. These systems are built around message-passing paradigms where different nodes (software processes) publish and subscribe to data streams. When a navigation node publishes GPS data and an IMU node publishes its readings, a sensor fusion node subscribes to both. It then processes these disparate streams, effectively taking their union of information to produce a single, refined state estimate. This modularity and inter-process communication are direct implementations of the principle of combining distinct sets of data to create a more comprehensive and useful output.
Future Innovations
As drone technology advances towards greater autonomy and intelligence, the principles of combining diverse information sets will become even more critical. Imagine drones operating in swarms, where each drone has its own set of sensor data and objectives, but the swarm as a whole must achieve a collective goal. Coordinating these individual “sets” of information and actions into a cohesive, synchronized “union” for the entire swarm is a significant challenge. Similarly, advanced AI applications like drone-based search and rescue or complex environmental monitoring will rely heavily on the ability to fuse vast and varied data streams, constantly updating and refining the drone’s understanding of its operational environment. The mathematical concept of the union of a set, though abstract, provides a foundational understanding of how these complex systems are built to integrate, synthesize, and act upon the totality of information available to them.