In the complex symphony of modern flight technology, understanding fundamental physics principles is paramount. Among these, projectile motion stands out as a critical concept, not just for traditional ballistics but profoundly influencing the design, navigation, and stabilization of advanced unmanned aerial vehicles (UAVs), commonly known as drones. Far from being a mere academic exercise, projectile motion dictates how a drone moves under the influence of gravity, affecting everything from its stable hover to the precise delivery of a payload, and even its controlled descent. For engineers, pilots, and innovators in flight technology, a deep grasp of this principle is indispensable for pushing the boundaries of what drones can achieve.
The Fundamentals of Projectile Motion in Aviation
At its core, projectile motion describes the path an object takes when thrown or projected into the air, subject only to the force of gravity and, in real-world scenarios, air resistance. While a drone is actively powered and controlled, understanding this baseline behavior is crucial for anticipating its movement when power fluctuates, during controlled maneuvers, or when interacting with its environment.
Defining the Core Principles
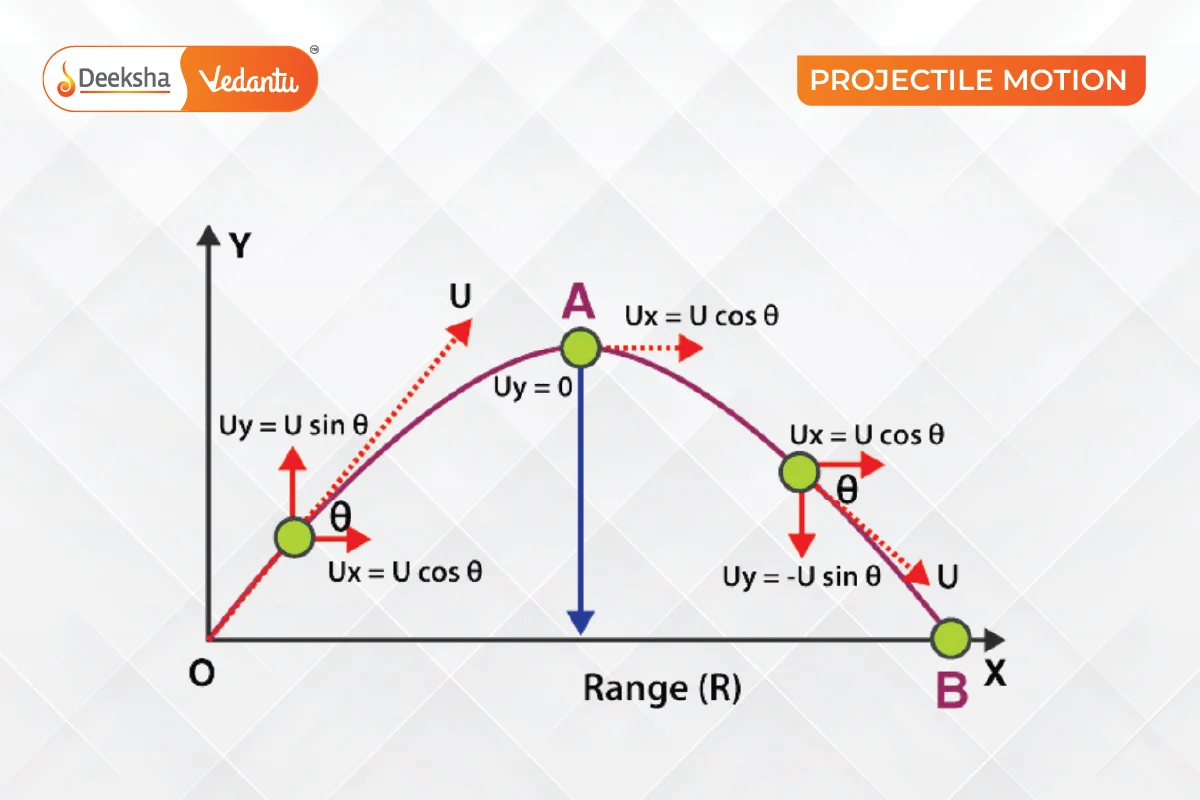
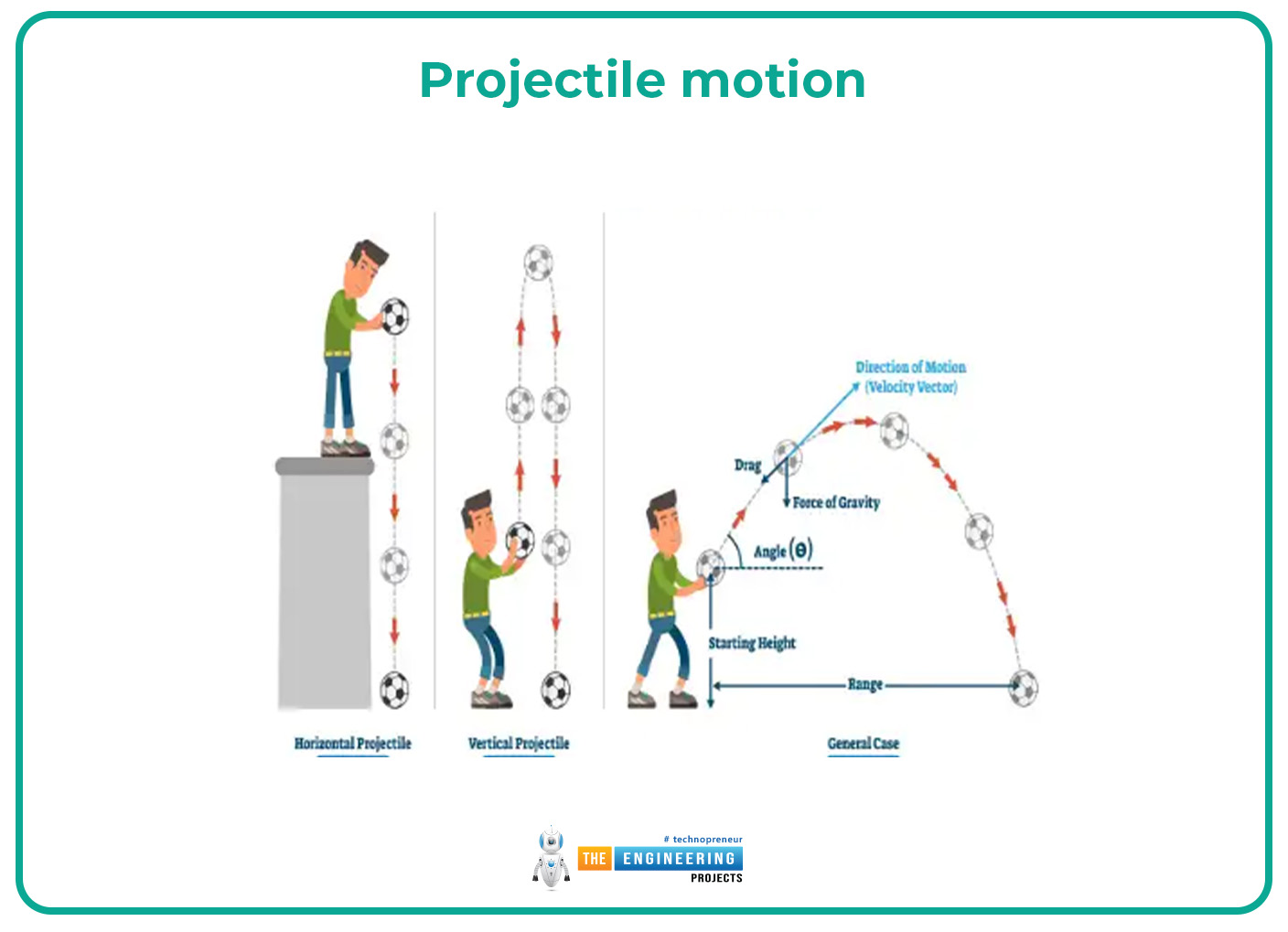
Projectile motion is typically analyzed by breaking it down into two independent components: horizontal and vertical. The horizontal motion, assuming no air resistance or thrust, is constant velocity motion, meaning the object moves at a steady speed in a straight line. The vertical motion, however, is influenced directly by gravity, causing the object to accelerate downwards. This results in a parabolic trajectory in an idealized vacuum. For drones, this idealized model serves as a baseline from which to calculate necessary thrust adjustments and trajectory corrections. Every time a drone shifts its position, gains or loses altitude, or maintains a hover, its flight controller is implicitly or explicitly compensating for the forces described by projectile motion.
Gravity’s Unseen Hand: Vertical and Horizontal Components
Gravity plays the central role in the vertical component of projectile motion, imparting a constant downward acceleration. This acceleration, approximately 9.81 meters per second squared (m/s²), dictates how quickly an object will fall and profoundly influences a drone’s ascent, descent, and hover capabilities. Without continuous upward thrust, a drone would immediately succumb to gravity, following a ballistic trajectory.
In the horizontal plane, if we momentarily ignore air resistance, there are no forces acting on the projectile, meaning its horizontal velocity remains constant. This independence of horizontal and vertical motion is a cornerstone of understanding. A drone’s navigation system must constantly calculate its desired horizontal position while simultaneously managing its vertical position against the pull of gravity. Any error in these calculations, or inadequate thrust response, can lead to deviations from the intended flight path. For instance, in an emergency, if a drone loses power, its subsequent descent path can be accurately modeled as a complex projectile motion problem, factoring in its initial velocity and the forces of drag.
Air Resistance: The Real-World Factor
While the vacuum model provides a useful theoretical foundation, real-world drone flight takes place within the Earth’s atmosphere, where air resistance (or drag) is a significant factor. Air resistance is a force that opposes motion through the air, increasing with the object’s speed and its frontal area. For drones, this means that their aerodynamic profile, weight, and speed all influence the actual trajectory.
Air resistance complicates the simple parabolic path, often making the actual trajectory shorter and less symmetrical. In drone flight technology, this factor cannot be ignored. Flight controllers and navigation systems incorporate sophisticated models to account for drag, ensuring stable flight and accurate path following, especially at higher speeds or in windy conditions. Without these compensations, a drone’s planned trajectory would consistently undershoot or overshoot its target, rendering precise navigation impossible. Understanding drag is also critical for designing efficient drone frames and propellers, minimizing energy expenditure and maximizing flight time.
Navigating the Skies: Projectile Motion and Drone Flight Paths
The principles of projectile motion are not just theoretical curiosities; they are foundational to every aspect of a drone’s operational flight, from its automated take-off sequence to precision tasks and emergency procedures.
From Take-off to Landing: Trajectory Prediction
For a drone, every planned movement, whether a simple hover, a straight-line translation, or a complex curve, is a carefully choreographed dance with gravity and thrust. Advanced navigation systems rely heavily on predictive modeling that incorporates projectile motion to anticipate the drone’s future position. When a drone ascends, it must generate sufficient upward thrust to overcome gravity and achieve a desired vertical velocity. During horizontal flight, the flight controller dynamically adjusts propeller speeds to maintain altitude against gravity while simultaneously propelling the drone forward.
Landing procedures are perhaps the most direct demonstration of controlled projectile motion. A drone doesn’t simply turn off its motors and fall; it executes a controlled descent, modulating its thrust to counteract gravity and reduce its vertical velocity to zero at the point of touch-down. Sophisticated algorithms ensure a smooth, stable, and accurate landing, often compensating for wind gusts and other environmental factors that could alter its projectile path. Without an accurate understanding of how gravity affects the drone’s mass and how thrust counteracts it, autonomous take-offs and landings would be perilous, if not impossible.
Precision Payload Delivery: The Art of the Drop
One of the most compelling applications of drones, particularly in logistics and emergency services, is precision payload delivery. This task directly embodies the principles of projectile motion. When a drone is tasked with dropping a package onto a target, it must calculate the exact release point, factoring in its own speed, altitude, the package’s weight, and anticipated air resistance. The package, once released, becomes an independent projectile.
The drone’s navigation system, often augmented with GPS and inertial measurement units (IMUs), must solve a complex ballistic problem in real-time. It predicts the package’s trajectory from the moment of release to impact, accounting for variables like wind speed and direction. This involves precise timing and positioning to ensure the payload lands accurately. Any miscalculation in the initial conditions – such as release altitude or horizontal velocity – will lead to the package missing its mark. This application highlights the sophisticated interplay between flight technology and the immutable laws of physics.

Emergency Descents and Controlled Falls
Even in less ideal scenarios, projectile motion remains a crucial consideration. In the event of a critical system failure, such as a motor malfunction or complete power loss, a drone’s flight controller (if still operational) might initiate an emergency descent. While uncontrolled freefall is a possibility, advanced systems aim for a “controlled fall” – managing the drone’s orientation and potentially deploying parachutes or using remaining thrust to reduce impact energy.
In such a scenario, the drone’s descent path is a form of projectile motion, albeit often uncontrolled or semi-controlled. Engineers use projectile motion models to design drone structures that can withstand anticipated impact forces and to inform safety protocols. For example, understanding terminal velocity (the maximum speed an object reaches when falling, where drag equals gravity) is vital for assessing potential damage upon impact and designing safety features to mitigate risks to people or property below. This highlights how fundamental physics informs both routine operations and critical safety mechanisms within flight technology.
Stabilization and Control: Counteracting Gravitational Forces
The very ability of a drone to maintain a stable hover or execute controlled maneuvers is a continuous battle against the forces described by projectile motion. Stabilization systems are the technological frontline in this ongoing engagement.
IMUs and Flight Controllers: Sensing and Correcting
The heart of a drone’s stabilization system lies in its Inertial Measurement Unit (IMU) and flight controller. The IMU, typically comprising accelerometers and gyroscopes, constantly senses the drone’s orientation, angular velocity, and linear acceleration in three-dimensional space. These sensors detect even the slightest deviation from the desired attitude – whether due to wind, an unbalanced payload, or the inherent pull of gravity.
The flight controller, acting as the drone’s brain, processes this data in real-time. It uses sophisticated algorithms to compare the drone’s current state with its desired state and then calculates the necessary corrective actions. For instance, if the IMU detects a slight downward acceleration due to a loss of thrust or a sudden downdraft, the flight controller will instantly command the motors to increase RPM, generating more upward thrust to counteract gravity and restore the desired altitude. This continuous feedback loop is what allows drones to appear to defy gravity, maintaining remarkable stability even in challenging conditions.
Dynamic Thrust Allocation for Stability
Maintaining stability against gravity is not just about generating enough total thrust; it’s about dynamically allocating thrust across multiple propellers. In a quadcopter, for example, each of the four motors can be individually controlled. If the drone starts to tilt due to gravity pulling one side down faster, the flight controller can increase thrust on the lower side and decrease it on the higher side, creating a torque that rights the drone.
This dynamic thrust allocation is a continuous process. Every microsecond, the flight controller is evaluating sensor data, calculating gravitational forces, and adjusting motor outputs to ensure the drone maintains its intended attitude and position. This is particularly critical when a drone is carrying an unevenly distributed payload or operating in turbulent air. The ability to precisely control individual propeller thrust based on real-time physics calculations is a hallmark of advanced drone flight technology.
GPS and Advanced Navigation: Guiding Against Gravity
While IMUs handle instantaneous stabilization, GPS (Global Positioning System) and other advanced navigation aids provide the broader contextual awareness needed for precise trajectory control over longer distances. GPS allows a drone to know its absolute position on Earth, enabling it to follow pre-programmed flight paths, maintain a fixed position (GPS hold), or return to its launch point with high accuracy.
However, GPS only provides horizontal and vertical coordinates. It doesn’t inherently account for the forces of gravity or air resistance. This is where the integration with IMUs and flight controllers becomes crucial. The flight controller uses GPS data to understand where the drone is relative to where it should be, and then applies its understanding of projectile motion to generate the necessary thrust vectors to close the gap. For instance, if a drone is programmed to fly a straight line between two points, the flight controller must constantly factor in the effect of gravity to maintain altitude and make forward progress, using GPS to verify its horizontal path. Without this integrated approach, merely having GPS coordinates would not be enough to achieve stable, precise, and autonomous flight.
Advanced Applications and Future Implications
The principles of projectile motion, deeply embedded in flight technology, are continuously being leveraged and refined to enable increasingly sophisticated drone applications and innovations.
Autonomous Flight and Predictive Modeling
The future of drone technology lies in greater autonomy, where UAVs can operate with minimal human intervention. This requires highly sophisticated predictive modeling capabilities, which are intrinsically linked to projectile motion. Autonomous drones must be able to plan optimal flight paths, anticipate environmental factors like wind, and dynamically adjust their trajectories in real-time.
For example, in obstacle avoidance, an autonomous drone doesn’t just react to an object; it predicts its own future position and the obstacle’s future position, using physics models to plot a safe evasion course. In advanced navigation, machine learning algorithms are being trained on vast datasets of flight trajectories, incorporating projectile motion principles to build more robust and efficient flight models. This allows drones to perform complex tasks like navigating challenging terrains, executing intricate aerial maneuvers, and coordinating with other drones, all while inherently accounting for the laws of motion under gravity.
Precision Agriculture and Environmental Monitoring
In fields like precision agriculture and environmental monitoring, drones are used to collect data, spray crops, or deploy sensors over vast areas. These applications demand exceptional accuracy, where understanding projectile motion is critical. When a drone sprays a field, the dispersal pattern of the liquid is a complex projectile motion problem influenced by droplet size, drone altitude, speed, and wind. Precision is key to minimizing waste and maximizing effectiveness.
Similarly, in environmental monitoring, drones might deploy small sensors or data loggers into specific locations. The accuracy of these deployments relies on the drone’s ability to precisely calculate the ballistic trajectory of the dropped item. The intersection of advanced sensor technology, GPS, and a deep understanding of physics allows drones to become invaluable tools for detailed environmental analysis and targeted resource management.
The Edge Cases: Ballistics and Beyond
While modern drones are designed for controlled flight, understanding projectile motion also extends to more specialized or extreme scenarios. Research into drone ballistics might involve the precise launch of objects from drones or even the design of drones capable of withstanding significant external forces or operating in extreme environments where conventional flight principles are challenged.
Furthermore, as drone technology merges with other fields like space exploration, the understanding of projectile motion in different gravitational fields becomes paramount. From designing lunar landers that resemble advanced drones to planning missions where payloads are deployed in microgravity, the foundational physics remains relevant. The continuous evolution of flight technology will undoubtedly find new and innovative ways to apply and overcome the fundamental principles of projectile motion, pushing the boundaries of what unmanned systems can achieve in our atmosphere and beyond.