The intricate dance of movement, balance, and spatial awareness that defines our interaction with the world is largely orchestrated by a sophisticated, often overlooked sensory system: proprioception. While the term “proprioceptor” may sound like a concept alien to engineering and flight, its fundamental function—the ability of an organism to sense its own body’s position, movement, and effort—is not just mirrored but critically essential in the realm of flight technology. For unmanned aerial vehicles (UAVs), particularly drones, replicating this biological “self-awareness” through advanced sensors and algorithms is paramount to achieving stable flight, precise navigation, and autonomous capabilities. Understanding the function of proprioceptors, therefore, provides a profound insight into the core principles governing modern flight stabilization and control systems.

The Biological Blueprint: Understanding Proprioception
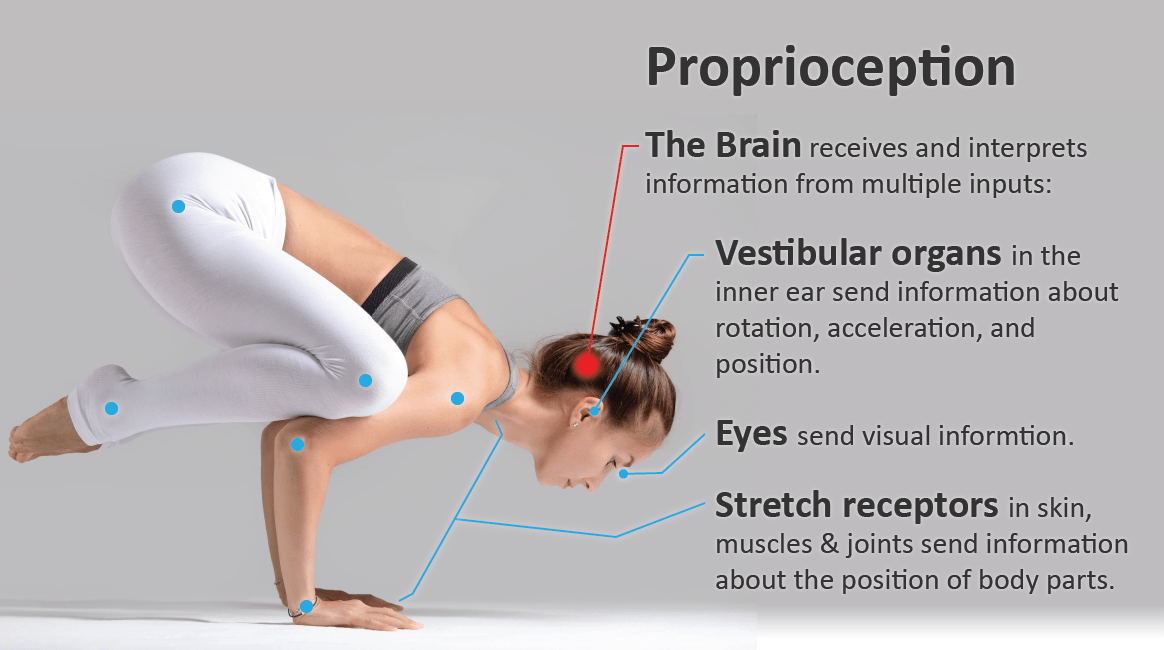
At its heart, proprioception is the body’s sixth sense, providing continuous, subconscious feedback about where our body parts are in space, how they are moving, and how much force they are exerting. Unlike exteroceptors, which sense external stimuli (like sight or sound), or interoceptors, which monitor internal organ states, proprioceptors focus entirely on the musculoskeletal system.
Definition and Core Role
Proprioception can be defined as the sense of the relative position of neighboring parts of the body and the strength of effort being employed in movement. It’s what allows us to touch our nose with our eyes closed, maintain balance on an uneven surface, or ride a bicycle without constantly looking down at our feet. This constant stream of information is crucial for motor control, coordination, and maintaining posture, enabling complex actions without conscious thought dedicated to each muscle contraction or joint angle. Without proprioception, even simple movements would require immense conscious effort and visual guidance, leading to clumsy and inefficient actions.
Types of Biological Proprioceptors
Biological systems employ several specialized types of proprioceptors, each attuned to different aspects of movement and position:
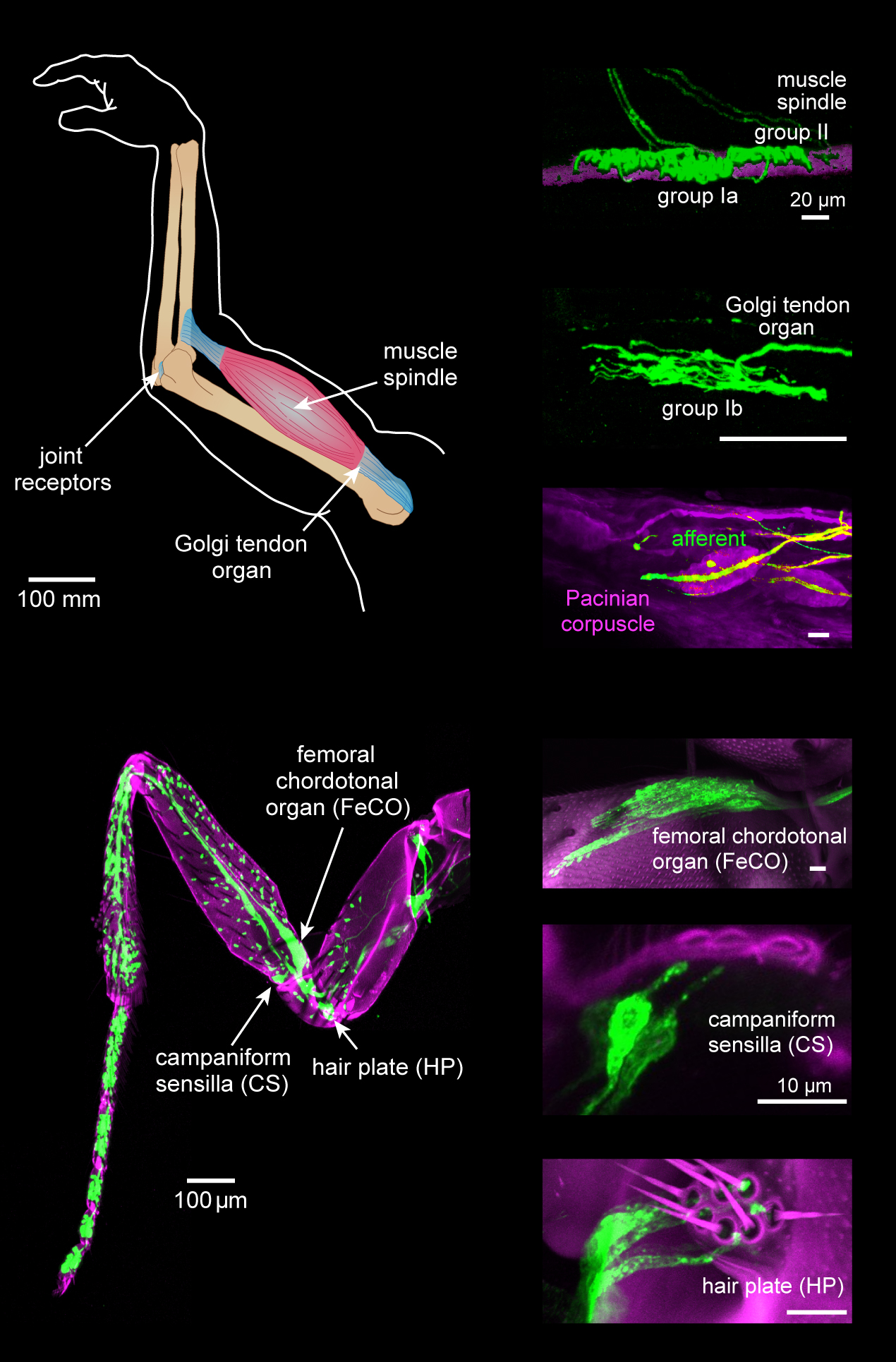
- Muscle Spindles: Located within the belly of skeletal muscles, these receptors detect changes in muscle length and the rate of change in length. They are crucial for the stretch reflex, helping to prevent overstretching and maintaining muscle tone. In essence, they tell the brain how stretched or contracted a muscle is.
- Golgi Tendon Organs (GTOs): Situated within the tendons, where muscle fibers connect to bone, GTOs monitor muscle tension or force. When a muscle contracts forcefully, GTOs send signals to the spinal cord, potentially inhibiting further contraction to prevent injury. They provide feedback on the effort being exerted.
- Joint Receptors: Found in and around joint capsules, these receptors respond to mechanical deformation of the joint capsule and ligaments. They provide information about joint position, movement direction, and movement speed. There are various types, including Ruffini endings, Pacinian corpuscles, and free nerve endings, each sensitive to different stimuli like pressure, vibration, and extreme joint angles.
Together, these proprioceptors create a sophisticated internal mapping system, continuously feeding data to the central nervous system, which then integrates this information with input from other senses (like vision and vestibular balance) to generate a comprehensive understanding of the body’s state and its interaction with gravity and the environment.
From Biology to Bytes: Proprioceptive Principles in Flight Technology
The fundamental requirement for any flying object, particularly an autonomous one, is to know its own state in space. How fast is it moving? In what direction? What is its orientation relative to the ground? Is it tilting? Is it accelerating? These are precisely the questions that biological proprioceptors answer for living organisms, and their functional equivalents are foundational to modern flight technology.
The Need for Self-Awareness in Flight
Imagine trying to fly a drone without any feedback on its current tilt, rotation, or acceleration. It would be impossible to maintain stability, execute precise maneuvers, or even stay aloft for more than a few seconds. Drones, like biological organisms, need an internal sense of “self” to navigate and control their movement. This self-awareness prevents chaotic, uncontrolled flight and enables sophisticated actions, from hovering precisely to following complex trajectories. The challenges of combating turbulence, wind gusts, and gravitational forces necessitate a constant, real-time understanding of the aircraft’s dynamic state.
Accelerometers and Gyroscopes: The Digital Kinesthesia
In the realm of flight technology, the primary sensors that emulate the function of biological proprioceptors are Inertial Measurement Units (IMUs), which typically comprise accelerometers and gyroscopes, often complemented by magnetometers.
- Accelerometers: These sensors measure linear acceleration along three axes (X, Y, Z). They detect changes in velocity, including the acceleration due to gravity. Functionally, accelerometers provide information analogous to the sense of effort or force that Golgi Tendon Organs provide, or the change in position that is inferred from muscle spindle data. By integrating acceleration data over time, a flight controller can estimate velocity and, with further integration, displacement. However, accumulated errors (drift) make raw accelerometer data unreliable for long-term position tracking.
- Gyroscopes (or Gyros): These devices measure angular velocity, or the rate of rotation, around one or more axes. A 3-axis gyroscope, common in drones, tells the flight controller how fast the drone is pitching (tilting forward/backward), rolling (tilting side-to-side), and yawing (rotating horizontally). Gyroscopes are the digital counterparts to joint receptors, providing critical feedback on the orientation and rotational movement of the aircraft. They are essential for maintaining stable flight, as they instantly detect any deviation from a desired attitude caused by external forces like wind.
Together, the accelerometer and gyroscope data are fused and processed by the flight controller’s algorithms to provide a comprehensive picture of the drone’s instantaneous orientation, movement, and acceleration. This “kinesthetic sense” is the bedrock of drone stabilization.
Advanced Stabilization and Navigation: The Core Application
The information gathered by these “proprioceptive” sensors is not merely raw data; it’s the foundation for the sophisticated control loops that define modern flight technology.
Maintaining Level Flight and Responding to Disturbances
One of the most immediate applications of IMU data is flight stabilization. When a drone is in the air, forces like wind gusts, air density changes, and even minute imbalances in propeller thrust can cause it to tilt, drift, or rotate unexpectedly. The gyroscopes detect these rotational deviations almost instantly. The flight controller then uses this information to make rapid, compensatory adjustments to the motor speeds, ensuring the drone maintains its desired orientation (e.g., level hover). Similarly, accelerometers provide data on linear movements, allowing the drone to correct for unwanted lateral or vertical drift. This continuous feedback loop, often operating thousands of times per second, is directly analogous to how our nervous system uses proprioceptive feedback to maintain balance and posture, making unconscious, micro-adjustments to muscle tension.
Precision Positioning and Trajectory Control
Beyond basic stabilization, proprioceptive-like sensors are crucial for precision navigation and executing complex flight paths. While GPS provides global position, it can be slow to update and lacks precision in localized environments or indoors. IMUs, in contrast, provide high-frequency, relative movement data. By fusing GPS data with IMU data (often through Kalman filters or similar sensor fusion algorithms), drones can achieve much more accurate and robust positioning, a process known as Inertial Navigation System (INS) or Attitude and Heading Reference System (AHRS). This fused data allows for:
- Precise Hovering: Maintaining a fixed position with minimal drift, even in challenging conditions.
- Waypoint Navigation: Following pre-programmed routes with high accuracy.
- Smooth Trajectory Following: Executing complex curves and maneuvers required for aerial cinematography or inspection.
- Relative Movement Detection: Crucial for landing systems, where precise knowledge of the drone’s descent rate and lateral movement relative to the ground is vital.
The ability to accurately sense internal movement and orientation is what allows a drone to know where it is going, where it should be, and to correct deviations with extraordinary speed and precision.
Enhancing Autonomous Flight and Obstacle Avoidance
As flight technology evolves towards greater autonomy, the functional role of proprioceptors becomes even more critical, integrating with other sensory inputs for intelligent decision-making.
Environmental Interaction and Real-time Adaptation
Autonomous flight relies on a drone’s ability to understand its environment and adapt its flight path in real-time. While cameras (visual odometry) and lidar/radar (distance sensing) provide external environmental data (exteroception), the IMU’s proprioceptive data is indispensable for understanding the drone’s own reaction to environmental stimuli. For instance, if an obstacle avoidance system detects an impending collision, the drone needs to execute an evasive maneuver. The IMU provides the immediate feedback on how effectively that maneuver is being performed—is the drone tilting fast enough? Is it changing direction as intended? This internal feedback ensures that the drone’s commanded actions are actually executed, allowing for closed-loop control of evasive actions and adaptive flight paths.
Moreover, for advanced applications like mapping and remote sensing, maintaining a stable and predictable flight path is paramount for data quality. Proprioceptive sensing ensures that the sensors mounted on the drone are oriented correctly and moving smoothly, optimizing data acquisition.
Future Directions: Bio-Inspired Robotics and Dexterity
The parallels between biological proprioception and artificial sensors hint at future advancements in flight technology. Bio-inspired robotics often seeks to emulate the robustness and adaptability of natural systems. Just as humans can perform complex tasks without constantly looking at their limbs, future autonomous drones could leverage enhanced proprioceptive capabilities for more agile, dexterous, and resilient flight. This could include:
- Adaptive Morphology: Drones that can change their shape or wing configuration in flight, requiring a profound “sense” of their own structural integrity and position of movable parts.
- Soft Robotics in Aviation: Incorporating flexible materials that deform, requiring internal strain sensors acting as advanced proprioceptors to understand their own state.
- Enhanced Human-Drone Interaction: Drones that can respond to subtle changes in their own flight dynamics, allowing for more intuitive and natural control, perhaps even mimicking human pilots’ proprioceptive understanding of their aircraft.
The ultimate goal is to create drones that are not just externally aware, but profoundly self-aware, allowing for truly intelligent and autonomous operation in complex, dynamic environments.
The Indispensable Role of Internal Sensing in Aviation
In conclusion, the function of proprioceptors, whether biological or artificial, is to provide an internal sense of position, movement, and effort. In the context of flight technology, particularly for drones, this translates into the indispensable role of Inertial Measurement Units (IMUs) and related sensor fusion systems. These components serve as the aircraft’s internal “nervous system,” continuously feeding critical data on orientation, rotation, and acceleration to the flight controller. This constant self-awareness is the bedrock upon which stability, precise navigation, autonomous capabilities, and advanced environmental interaction are built. As we push the boundaries of aerial robotics, the principles gleaned from biological proprioception will continue to inspire and guide the development of ever more sophisticated and intelligent flight systems.