The relentless march of innovation in drone technology, from sophisticated AI follow modes to complex autonomous flight systems and precision remote sensing, hinges critically on the underlying computational power of their embedded processors. At the heart of achieving this robust performance and efficiency lies a fundamental concept in computer architecture: pipelining. Far from being a mere technical detail, pipelining is a strategic design paradigm that enables processors to execute instructions with remarkable speed and throughput, making it indispensable for the real-time decision-making and data processing required by cutting-edge drone applications.
The Essence of Pipelining: Parallel Execution for Enhanced Throughput
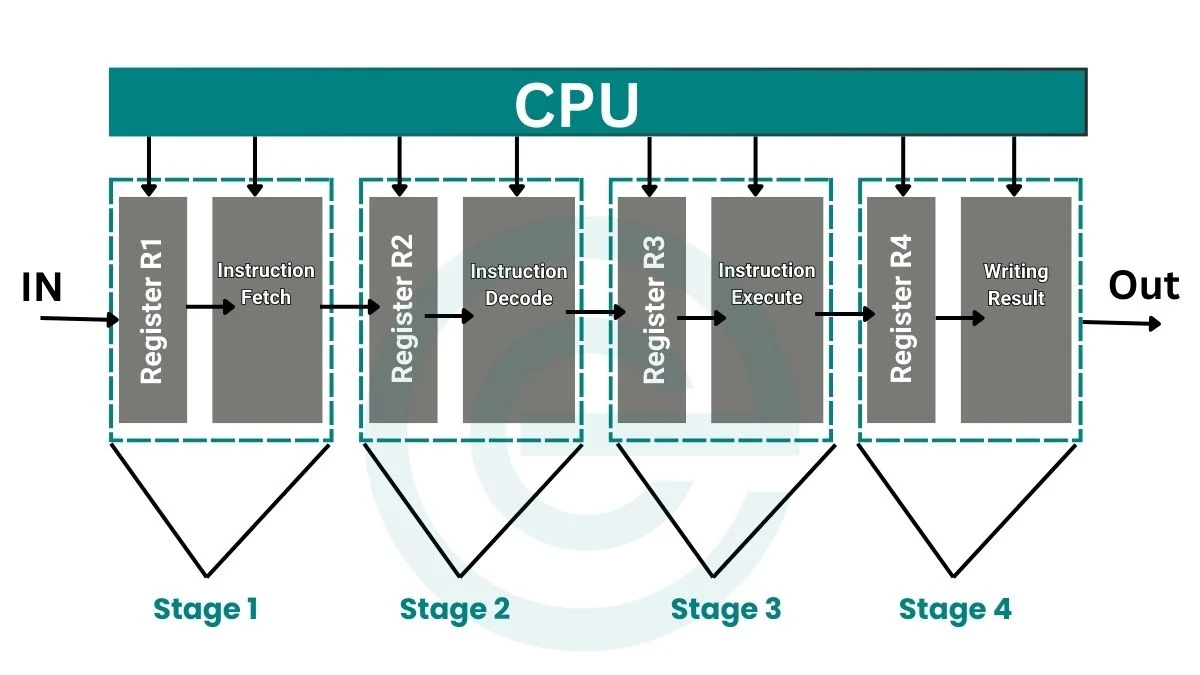
Pipelining in computer architecture is akin to an assembly line in a manufacturing plant. Instead of waiting for one product (or instruction) to complete its entire journey through the factory before starting the next, multiple products are in various stages of completion simultaneously. In a processor, an instruction typically goes through several distinct stages, such as fetching the instruction, decoding it, executing the operation, and writing the results back to memory or registers. Without pipelining, a processor would execute all stages of one instruction before moving on to the first stage of the next instruction. This sequential approach, while simple, is inherently inefficient.
Pipelining breaks down the instruction execution process into a series of smaller, sequential sub-operations or stages, with each stage handled by a dedicated hardware unit. As an instruction completes one stage, it moves to the next, freeing up the preceding stage to begin processing the subsequent instruction. This parallel processing of different stages of multiple instructions allows for a significant increase in the number of instructions completed per unit of time, known as throughput. For drones engaging in complex tasks like real-time object detection for obstacle avoidance or executing intricate flight path algorithms, this enhanced throughput is not just a luxury; it’s a necessity for safe, reliable, and intelligent operation.
Deconstructing the Pipelined Processor Flow
A typical instruction pipeline might have stages such as:
- Instruction Fetch (IF): Retrieves the next instruction from memory.
- Instruction Decode (ID): Interprets the instruction and fetches any required operands from registers.
- Execute (EX): Performs the arithmetic or logical operation specified by the instruction.
- Memory Access (MEM): Reads from or writes to memory if the instruction requires it.
- Write Back (WB): Stores the result of the instruction back into a register.
In a non-pipelined system, all five stages would complete for instruction A before instruction B even begins its IF stage. With a 5-stage pipeline, however, by the time instruction A reaches the MEM stage, instruction B could be in the EX stage, instruction C in the ID stage, instruction D in the IF stage, and instruction E could be starting its journey. This continuous flow drastically reduces the overall time taken to complete a batch of instructions, providing the computational horsepower needed for autonomous navigation and sophisticated sensor data fusion in drones.
The Performance Dividend: Powering Advanced Drone Capabilities
The primary benefit of pipelining is a substantial increase in the processor’s instruction throughput, leading directly to higher overall performance. This performance dividend is crucial for the demanding computational loads characteristic of advanced drone applications falling under the “Tech & Innovation” umbrella.
Real-Time Processing for Autonomous Flight and Obstacle Avoidance
Autonomous flight systems require instantaneous processing of sensor data—from LiDAR, cameras, ultrasonic sensors, and GPS—to construct an environmental model, plan trajectories, and execute flight controls. Any delay can have critical safety implications. Pipelined processors ensure that these complex algorithms, which involve millions of instructions per second, are executed with the speed necessary for real-time decision-making. For instance, an AI-powered obstacle avoidance system needs to continuously analyze incoming visual or depth data, identify potential collisions, and recalculate flight paths within milliseconds. The rapid succession of instruction execution facilitated by pipelining directly contributes to this responsiveness, allowing drones to navigate dynamic environments safely and effectively.
Fueling AI Follow Mode and Computer Vision
AI follow mode, object tracking, and advanced computer vision tasks are highly computationally intensive. These applications involve processing high-resolution video streams, performing intricate neural network inferences, and often tracking multiple targets simultaneously. Processors with deep pipelines can handle the sheer volume of data and complex calculations involved in these AI workloads more efficiently. By executing more instructions per clock cycle, pipelining allows the drone’s onboard computer to run sophisticated machine learning models faster, translating to smoother tracking, more accurate object recognition, and a richer interactive experience for the user.

Enhancing Efficiency for Mapping and Remote Sensing
Drone-based mapping and remote sensing involve collecting vast amounts of data—photogrammetry, multispectral imagery, thermal data—and often performing initial processing onboard before transmission. Generating high-resolution maps or performing real-time analytics on sensor data demands significant processing power. Pipelining ensures that the drone can rapidly process these large datasets, stitching images, applying calibration models, or even identifying anomalies on the fly. This efficiency can reduce the time required for missions, improve data quality by processing closer to the source, and enable more complex, multi-sensor data fusion for comprehensive environmental analysis.
Navigating the Challenges: Hazards and Optimization in Drone Architectures
While pipelining offers immense benefits, it also introduces complexities and potential pitfalls that processor designers must address. These are typically categorized as “hazards” and require sophisticated hardware and software solutions to maintain the pipeline’s efficiency.
Structural Hazards
These occur when two different instructions require the same hardware resource at the same time. For example, if two instructions simultaneously need to access the same memory bank. In drone processors, careful design of memory hierarchies and multi-port registers mitigates structural hazards, ensuring that critical flight control instructions are not stalled by less time-sensitive data processing tasks.
Data Hazards
A data hazard arises when an instruction depends on the result of a previous instruction that has not yet completed its execution and written its result. For example, if instruction B needs the output of instruction A, but instruction A is still in the execution stage of the pipeline. To combat this, techniques like “forwarding” (or “bypassing”) are employed, where the result of an instruction is sent directly to the input of a subsequent instruction that needs it, without waiting for the result to be written back to a register. This immediate data transfer is crucial for the tight feedback loops inherent in drone stabilization and control systems.
Control Hazards (Branch Hazards)
Control hazards occur when the processor encounters a branch instruction (e.g., an if-else statement) that changes the normal sequential flow of instruction execution. If the pipeline has already fetched and started processing instructions assuming the branch won’t be taken, and then the branch is taken, those speculative instructions must be flushed, wasting cycles. Drone processors, especially those handling real-time flight logic, employ advanced branch prediction techniques to guess the outcome of a branch and fetch instructions accordingly. If the prediction is wrong, a penalty is incurred, but correct predictions minimize stalls, maintaining the fluidity of control algorithms. Sophisticated embedded architectures for drones might also use techniques like speculative execution to further mask these latencies, allowing the drone’s flight controller to react to sudden changes with minimal lag.
Optimizing pipelined architectures for drone applications often involves a trade-off between pipeline depth (more stages for higher theoretical throughput) and complexity (increased hazard management). Drone-specific embedded processors are often designed with moderate pipeline depths, robust hazard detection, and efficient caching mechanisms to strike an optimal balance between performance, power consumption, and reliability—critical factors for airborne platforms.

The Future of Pipelining in Drone Tech & Innovation
As drones become even more autonomous, intelligent, and capable of executing complex missions in dynamic environments, the demands on their onboard computing systems will only intensify. The need for faster data processing, more sophisticated AI algorithms, and higher fidelity sensor fusion will continue to push the boundaries of embedded processor design. Pipelining, as a foundational principle, will evolve alongside these demands, with advancements in areas like out-of-order execution, deeper pipelines, and specialized instruction sets tailored for AI and digital signal processing workloads.
The efficiency and performance gains provided by pipelining are not merely academic; they are the bedrock upon which the next generation of drone innovations will be built. From drones that can autonomously navigate complex urban canyons to those performing highly precise environmental monitoring or participating in synchronized swarm operations, the ability of their processors to execute instructions with speed and parallel efficiency, thanks to pipelining, is a critical enabler. It ensures that the drone’s brain can keep pace with its mission, transforming raw data into intelligent action, and driving the very essence of tech and innovation in the unmanned aerial vehicle sector.