In the intricate world of flight technology, particularly concerning unmanned aerial vehicles (UAVs) like drones, the term “oscillating” refers to a critical phenomenon that dictates a system’s stability, performance, and ultimate reliability. Far from being a benign tremor, oscillation signifies a repetitive, often undesired, fluctuation around an equilibrium point. For complex airborne platforms, understanding and managing oscillation is paramount, as it directly impacts everything from precise navigation and stable camera footage to the longevity of components and the safety of flight operations. It’s a challenge inherent in feedback control systems, where the very mechanisms designed to maintain stability can, if improperly implemented or encountering unforeseen variables, inadvertently induce instability in the form of sustained or growing oscillations.
The Core Concept of Oscillation in Flight Dynamics
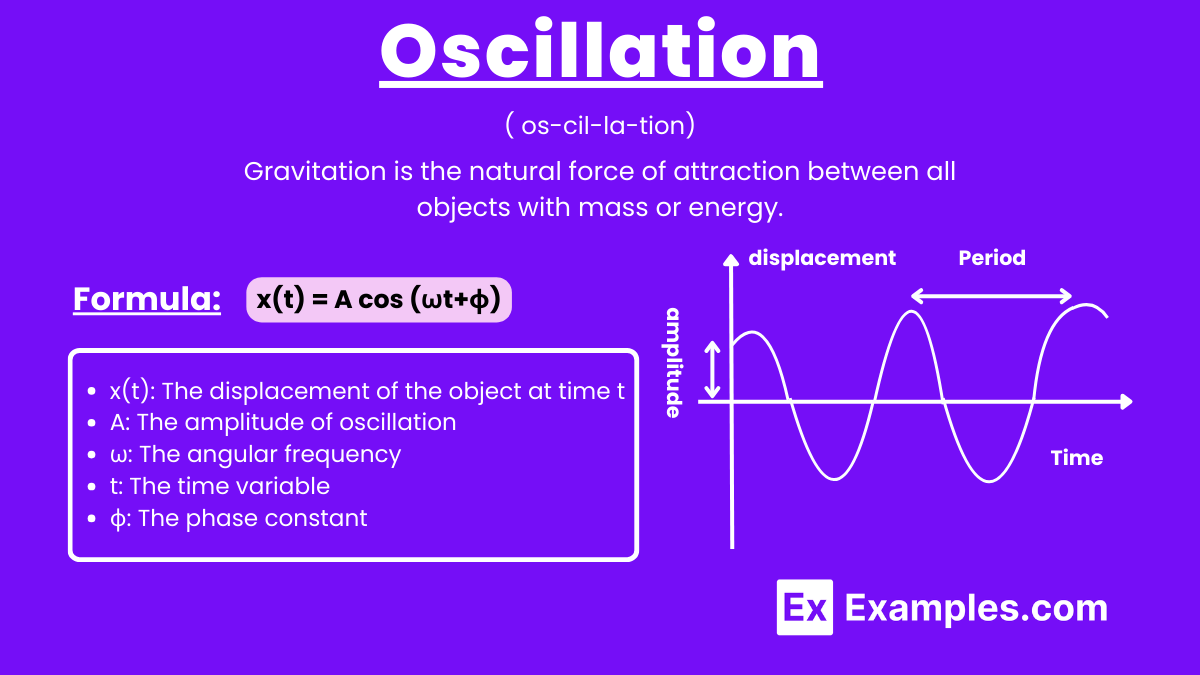
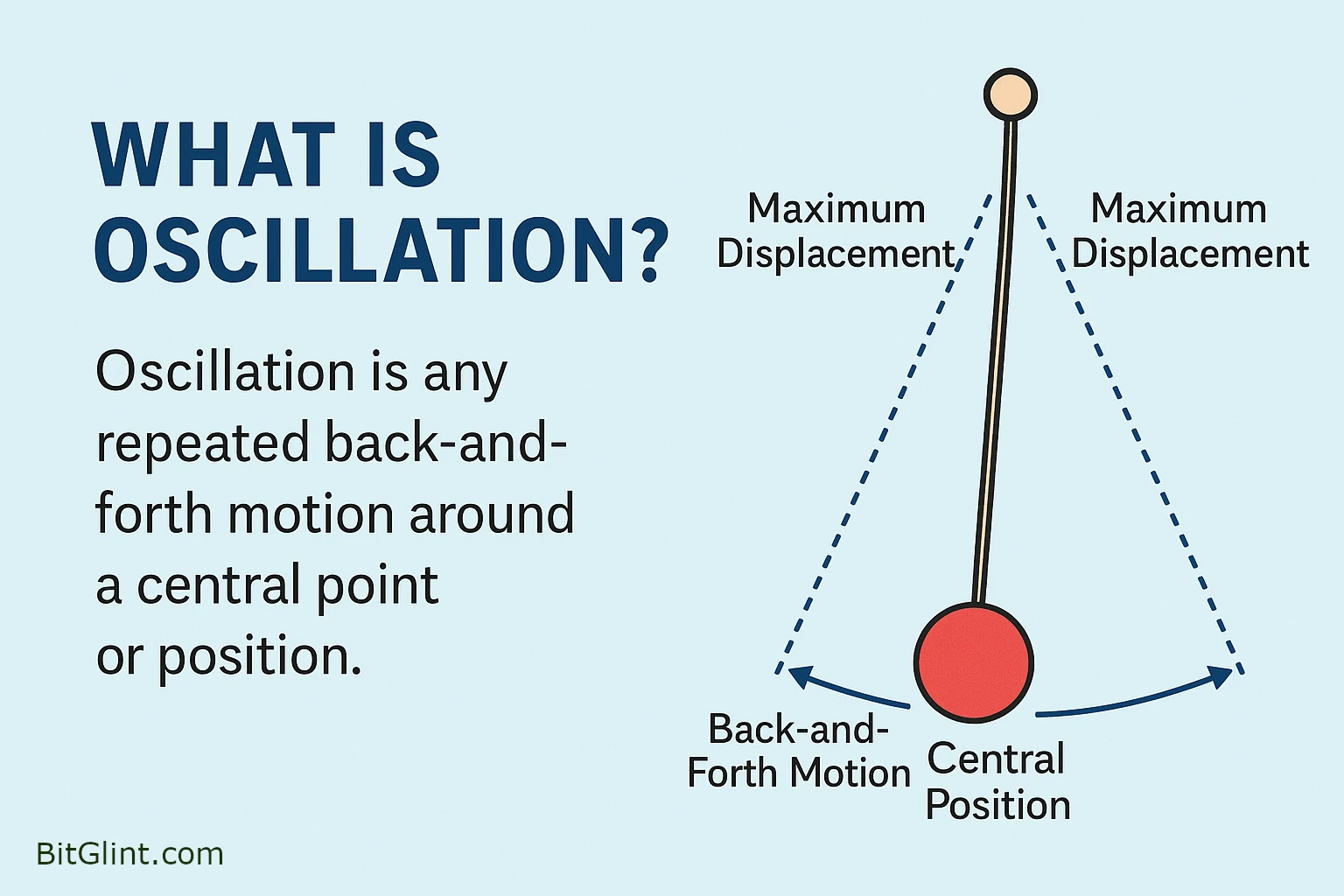
Oscillation, at its heart, describes any periodic motion or fluctuation. In the context of flight dynamics and drone technology, it typically manifests as an unwanted, rhythmic variation in attitude (pitch, roll, yaw), altitude, speed, or even the position of a control surface or gimbal. This dynamic behavior signals a system that is struggling to achieve or maintain a steady state, constantly overshooting and then correcting, leading to a perpetual cycle of deviation.
Defining Periodic Motion and System Instability
A system is said to be oscillating when its state variables (e.g., angular velocity, position) repeatedly move back and forth around a set point or desired trajectory. These oscillations can be stable (damped, eventually settling down), sustained (continuing indefinitely at a constant amplitude), or unstable (growing in amplitude until the system fails or becomes uncontrollable). For flight systems, especially drones that rely on continuous adjustments to maintain a hover or follow a path, stable oscillation is merely inefficient, but sustained or unstable oscillation is catastrophic.
The root cause often lies in the system’s response to disturbances or control inputs. An ideal flight system responds smoothly and quickly to regain equilibrium. However, if the corrective forces are too aggressive, too delayed, or misaligned with the actual system state, they can push the system past equilibrium, necessitating another correction in the opposite direction, thus creating a cycle. This inherent challenge is a hallmark of all feedback control systems, which drones extensively employ.
Feedback Loops and Resonant Frequencies
At the core of drone flight technology are sophisticated feedback control loops. Sensors (gyroscopes, accelerometers, magnetometers, barometers, GPS) continuously measure the drone’s actual state. This measured state is compared to the desired state (e.g., a commanded hover position or a specific flight path). The flight controller then calculates an error and issues commands to the motors or actuators to reduce this error. This continuous cycle of sensing, comparing, and correcting forms a feedback loop.
Oscillation frequently arises when the feedback loop exhibits particular characteristics:
- Excessive Gain: If the controller’s response to an error is too strong (high gain), it might overcorrect, leading to an overshoot. This overcorrection then becomes the new “error” for the system, prompting an equally strong correction in the opposite direction, perpetuating the cycle.
- Phase Lag: Delays within the feedback loop – perhaps due to sensor processing time, computational latency in the flight controller, or the physical response time of the motors and propellers – can cause the corrective action to arrive too late. By the time the correction is applied, the system has already moved past the ideal point, making the correction effectively destabilizing.
- Resonance: Every physical system has natural frequencies at which it prefers to vibrate. If the frequency of the oscillatory behavior induced by the control system matches or is close to one of the drone’s structural resonant frequencies, the oscillations can be amplified dramatically, leading to severe instability, structural damage, and potential system failure.
Understanding these concepts is crucial for designing and tuning flight technology that ensures smooth, stable, and reliable operation.
Causes of Oscillation in Drone Flight Technology
Oscillation in drones can stem from a multitude of factors, ranging from the fundamental tuning of control algorithms to subtle mechanical imperfections and environmental interactions. Identifying the specific cause is often the first step in effective mitigation.
PID Controller Tuning and Gain Settings (P, I, D terms)
The Proportional-Integral-Derivative (PID) controller is the workhorse of most drone flight control systems. It calculates control outputs based on the present error (Proportional), the accumulation of past errors (Integral), and the prediction of future errors (Derivative). Each of these three “gains” (P, I, D) must be precisely tuned for optimal performance.
- High P-gain (Proportional): Too high a P-gain means the controller reacts very strongly to any immediate error. While this makes the drone responsive, excessive P-gain can lead to overshooting the target and oscillating rapidly around the setpoint.
- High D-gain (Derivative): The D-term dampens oscillations by reacting to the rate of change of the error. However, if the D-gain is too high, it can amplify sensor noise, leading to very high-frequency vibrations and instability.
- High I-gain (Integral): The I-term helps eliminate steady-state errors over time. If too high, it can cause slow, long-period oscillations or “hunting” around the setpoint as it overcorrects for accumulated past errors.
Improperly tuned PID gains are a leading cause of oscillations, manifesting as wobbles, jerks, or constant corrections that prevent smooth flight.
Mechanical Factors (Vibrations, Propeller Imbalance, Frame Flex)
Beyond the software, physical attributes of the drone itself significantly contribute to oscillatory behavior.
- Motor and Propeller Imbalance: Even slight imbalances in motors or propellers create vibrations that propagate through the frame. These vibrations can be picked up by sensitive accelerometers and gyroscopes, introducing noise into the feedback loop that the flight controller misinterprets as actual movement, leading to incorrect corrections and oscillations.
- Frame Flex and Resonance: If the drone’s frame is not rigid enough, or if its design allows for specific components to vibrate at certain frequencies, it can become a conduit for resonance. Frame flex can introduce structural delays and amplify vibrations, making it challenging for the flight controller to accurately perceive and stabilize the drone.
- Loose Components: Any loose component – motors, cameras, battery, or even wires – can vibrate independently or create secondary oscillations that interfere with sensor readings and overall stability.
Environmental Disturbances and Sensor Noise
The external environment and the quality of sensor data play a critical role.
- Wind and Air Currents: External forces like wind gusts can push a drone off its commanded position. The flight controller’s response to correct for these disturbances can, if not properly damped, induce oscillations as it constantly battles changing conditions.
- Sensor Noise: All sensors have a degree of inherent noise. If this noise is not adequately filtered, the flight controller might attempt to “correct” for phantom movements, leading to high-frequency, jittery oscillations that consume power and wear out components.
- Magnetic Interference: Magnetometers, crucial for yaw stability, can be affected by electromagnetic interference from power lines, motors, or internal electronics, leading to erratic yaw movements or slow, meandering oscillations.
Software Glitches and Latency Issues
Software is the brain of the drone, and its imperfections can manifest as oscillation.
- Computational Delays/Latency: The time it takes for sensors to acquire data, for the flight controller to process it, and for the motor controllers to respond introduces latency into the feedback loop. Excessive latency can delay corrective actions, causing the drone to overshoot and leading to oscillations.
- Bugs in Firmware: Errors in the flight controller’s firmware or operating system can lead to incorrect calculations, misinterpretation of sensor data, or improper control outputs, all of which can result in unstable, oscillatory flight.
- Sampling Rate Discrepancies: If different sensors are sampled at different rates, or if the control loop operates asynchronously, it can introduce timing inaccuracies that destabilize the control system and promote oscillation.
Impact of Oscillation on Drone Performance and Safety
The implications of an oscillating drone extend far beyond mere annoyance. They fundamentally compromise the drone’s capabilities, reduce its lifespan, and pose significant safety risks.
Reduced Stability and Control Precision
The most immediate effect of oscillation is a degradation of flight stability and control precision. A drone that is constantly wobbling or vibrating cannot maintain a stable hover, fly a straight line, or execute precise maneuvers. This makes it challenging to pilot, especially in demanding environments or for tasks requiring fine control.
Degradation of Sensor Data and Navigation Accuracy
Oscillations introduce noise into sensor readings. A vibrating gyroscope might report erratic angular velocities, and a shaking accelerometer might provide noisy gravity vectors. This corrupted data feeds directly into the navigation system, leading to inaccurate position estimates, drift, and unreliable GPS lock, ultimately compromising the drone’s ability to navigate precisely or hold a specific geographic location.
Component Wear and Structural Fatigue
The continuous, repetitive stresses induced by oscillation put immense strain on mechanical and electronic components. Motors, bearings, and propellers experience accelerated wear. Electronic components can vibrate loose or fail prematurely. The drone’s frame itself can suffer from structural fatigue, potentially leading to catastrophic failure mid-flight, especially if the oscillations are high-amplitude or resonate with structural frequencies.
Compromised Payload Operation (e.g., Camera Gimbals)
For applications like aerial filmmaking, photography, or inspection, payload stability is paramount. An oscillating drone transfers these movements to its mounted camera or sensor platform, even if the payload is on a gimbal. While gimbals compensate for some motion, severe oscillations can exceed their stabilization limits, resulting in shaky, blurred, or unusable footage and data. This directly impacts the quality and utility of the drone’s primary function in many commercial applications.
Safety Hazards and Potential for Catastrophic Failure
Ultimately, uncontrolled or severe oscillation is a significant safety hazard. A drone losing stability can become unpredictable, veer off course, or crash. This poses a risk to nearby people, property, and the drone itself. In critical applications, such as cargo delivery, surveying over sensitive areas, or operating near manned aircraft, such failures can have severe consequences, including significant financial losses and potential legal repercussions.
Mitigating Oscillation Through Advanced Flight Technology
Addressing oscillation requires a multi-faceted approach, combining sophisticated algorithms, robust engineering, and intelligent system design. Modern flight technology employs numerous strategies to dampen or eliminate oscillatory behavior.
Advanced Control Algorithms (Adaptive PID, LQR, H-infinity)
While PID is fundamental, advanced control algorithms offer superior performance in complex and dynamic environments.
- Adaptive PID: These controllers can dynamically adjust their P, I, and D gains in real-time based on flight conditions, payload changes, or environmental disturbances, maintaining optimal stability across varying scenarios.
- Linear-Quadratic Regulator (LQR): LQR controllers minimize a cost function that considers both the system’s state deviation and the control effort. This allows for a more balanced approach to stability, often resulting in smoother, less oscillatory responses compared to fixed-gain PID.
- H-infinity Control: H-infinity controllers are designed to be robust against model uncertainties and external disturbances. They are particularly effective in challenging environments where precise system models are hard to obtain or where significant unmodeled dynamics exist, providing superior stability guarantees.
- Model Predictive Control (MPC): MPC predicts future system behavior and optimizes control inputs over a future time horizon, taking into account constraints. This predictive capability allows for smoother transitions and proactive oscillation prevention.
Vibration Isolation and Damping Mechanisms
Mechanical solutions are critical for preventing external vibrations from affecting the flight controller.
- Anti-Vibration Mounts: Flight controllers, IMUs (Inertial Measurement Units), and sensitive payloads are often mounted on specialized dampening materials (e.g., silicone gel, rubber grommets) to absorb vibrations originating from motors and propellers.
- Vibration-Damping Frames: Drone frames can be designed with materials and geometries that inherently absorb and dissipate vibrational energy, preventing resonance and transmission to sensitive electronics.
- Dynamic Balancers: Specialized propeller and motor balancers can precisely identify and correct imbalances, significantly reducing the primary source of high-frequency vibrations.
Enhanced Sensor Fusion and Filtering Techniques
The quality of sensor data is paramount.
- Kalman Filters and Complementary Filters: These advanced filtering techniques combine data from multiple sensors (e.g., gyroscopes, accelerometers, magnetometers, GPS) to provide a more accurate and noise-free estimate of the drone’s state. By intelligently weighting and fusing sensor data, they can effectively reduce the impact of individual sensor noise and provide a cleaner signal to the flight controller, thus reducing oscillations.
- Digital Signal Processing (DSP): Implementing robust digital filters within the flight controller’s firmware can suppress specific frequency ranges of noise and vibrations before they even reach the control algorithms, preventing them from inducing oscillatory responses.
Real-time Diagnostics and Predictive Maintenance
Advanced drones incorporate systems for monitoring their own health.
- Telemetry and Logging: Continuous logging of sensor data, motor outputs, and controller responses allows for post-flight analysis to identify patterns of oscillation and pinpoint their causes.
- Real-time Anomaly Detection: Algorithms can monitor flight parameters in real-time, detecting unusual vibration patterns or control deviations that might indicate incipient oscillation or component failure, prompting warnings or automated corrective actions.
- Predictive Maintenance: By analyzing accumulated flight data, systems can predict when components might be approaching the end of their useful life or when tuning might be required, proactively addressing potential sources of oscillation before they become critical.
Robust Frame Design and Propeller Balancing
Fundamental mechanical integrity cannot be overlooked.
- Stiff and Lightweight Materials: Using high-quality, rigid materials like carbon fiber for the drone frame minimizes flex and prevents the frame from contributing to oscillations.
- Aerodynamic Propeller Design: Well-designed, balanced propellers not only reduce vibrations but also ensure efficient thrust, minimizing the need for the flight controller to overcompensate for inefficient lift.
The Future of Stable Flight: Towards Perfect Equilibrium
The pursuit of perfectly stable, oscillation-free flight is an ongoing endeavor, pushing the boundaries of engineering and artificial intelligence. The next generation of flight technology aims for systems that are not just stable but also intrinsically adaptable and resilient.
AI and Machine Learning for Self-Tuning Systems
Artificial intelligence and machine learning are revolutionizing how drones achieve and maintain stability. Instead of relying on manual PID tuning, AI can observe flight characteristics, learn system dynamics, and automatically adjust control parameters in real-time to eliminate oscillations across varying flight conditions, payloads, and even component degradation. Machine learning models can be trained on vast datasets of flight data to recognize and instantly counteract incipient oscillatory behavior, leading to truly adaptive and self-optimizing flight controllers. This represents a significant leap towards truly autonomous and perfectly balanced flight.
Fault-Tolerant Control Systems
Beyond simply preventing oscillation, future flight technology will incorporate advanced fault-tolerant control. These systems are designed to maintain stable flight even in the presence of component failures, such as a damaged propeller, a failing motor, or a compromised sensor. By continuously monitoring the health of all subsystems and dynamically reconfiguring control strategies, a fault-tolerant drone could detect the onset of oscillation due to a partial failure and actively compensate, preventing a crash and allowing for a safe return or continued operation. This level of robustness is crucial for mission-critical applications and enhances overall safety.

Hardware-Software Co-Design for Intrinsic Stability
The future lies in a holistic approach where hardware and software are no longer designed in isolation but as a cohesive, integrated system. This “co-design” philosophy aims to build intrinsic stability into the drone from the ground up. This involves:
- Optimized Component Integration: Designing motors, ESCs (Electronic Speed Controllers), and flight controllers that are perfectly matched and communicate with minimal latency.
- Structural-Control System Synergy: Creating airframes whose natural frequencies are well-separated from potential control loop frequencies, and where structural damping is maximized.
- Distributed Sensing and Processing: Employing a network of sensors and micro-controllers distributed throughout the drone to provide redundant data and localized processing, reducing reliance on a single point of failure and improving response times to disturbances that might induce oscillation.
By weaving together these advanced technological threads, the industry is steadily moving towards a future where oscillating flight is a relic of the past, and drones operate with unprecedented levels of smoothness, reliability, and precision, redefining what is possible in aerial mobility and data acquisition.