The Foundation of Collaborative Drone Software Development
In the rapidly evolving landscape of drone technology, innovation is synonymous with sophisticated software development. From advanced navigation algorithms that enable autonomous flight to intricate machine learning models powering AI follow modes and real-time mapping systems, the creation of these cutting-edge features is a deeply collaborative, iterative process. At the heart of managing this complexity and ensuring seamless teamwork among developers lies Git, the distributed version control system. Among its core commands, git add stands out as a fundamental utility, serving as the crucial first step in recording changes made to a drone’s software codebase. Without an effective way to track, manage, and merge modifications, developing the next generation of intelligent drone systems would be an arduous, if not impossible, task.
Why Version Control Matters for Drone Tech
The development of drone software, particularly within the “Tech & Innovation” sphere, is characterized by multiple developers contributing simultaneously to the same codebase. Imagine a team working on an autonomous drone platform: one engineer might be refining the obstacle avoidance system, another could be enhancing the GPS-based navigation, while a third is optimizing the payload management system for a remote sensing application. Without a robust version control system, coordinating these efforts would quickly descend into chaos, leading to lost work, conflicting changes, and significant delays.
Version control provides a historical record of every modification, allowing teams to revert to previous stable states, understand who made what changes and why, and seamlessly integrate diverse contributions. For safety-critical systems like autonomous drones, this traceability is not just convenient; it’s imperative for debugging, compliance, and continuous improvement. It ensures that every line of code deployed to a drone’s flight controller or mission planning software has been systematically tracked and reviewed, upholding the reliability and performance standards expected in advanced aerial platforms.
Git: The Backbone of Innovation
Git has emerged as the industry standard for version control due to its distributed nature, efficiency, and flexibility. Unlike centralized systems, every developer has a complete copy of the repository, enabling offline work and reducing dependency on a single server. This architecture is particularly beneficial for global teams collaborating on complex drone projects, allowing them to work asynchronously and merge their contributions effectively. Git facilitates branching and merging, critical features that allow developers to experiment with new features (like an experimental AI gesture control mode) in isolation without affecting the main stable codebase for drone operations. Once thoroughly tested and validated, these new features can be seamlessly integrated. For “Tech & Innovation” specifically, Git underpins the agile methodologies crucial for rapid prototyping, testing, and deployment cycles essential for staying ahead in drone technology.
Demystifying the git add Command
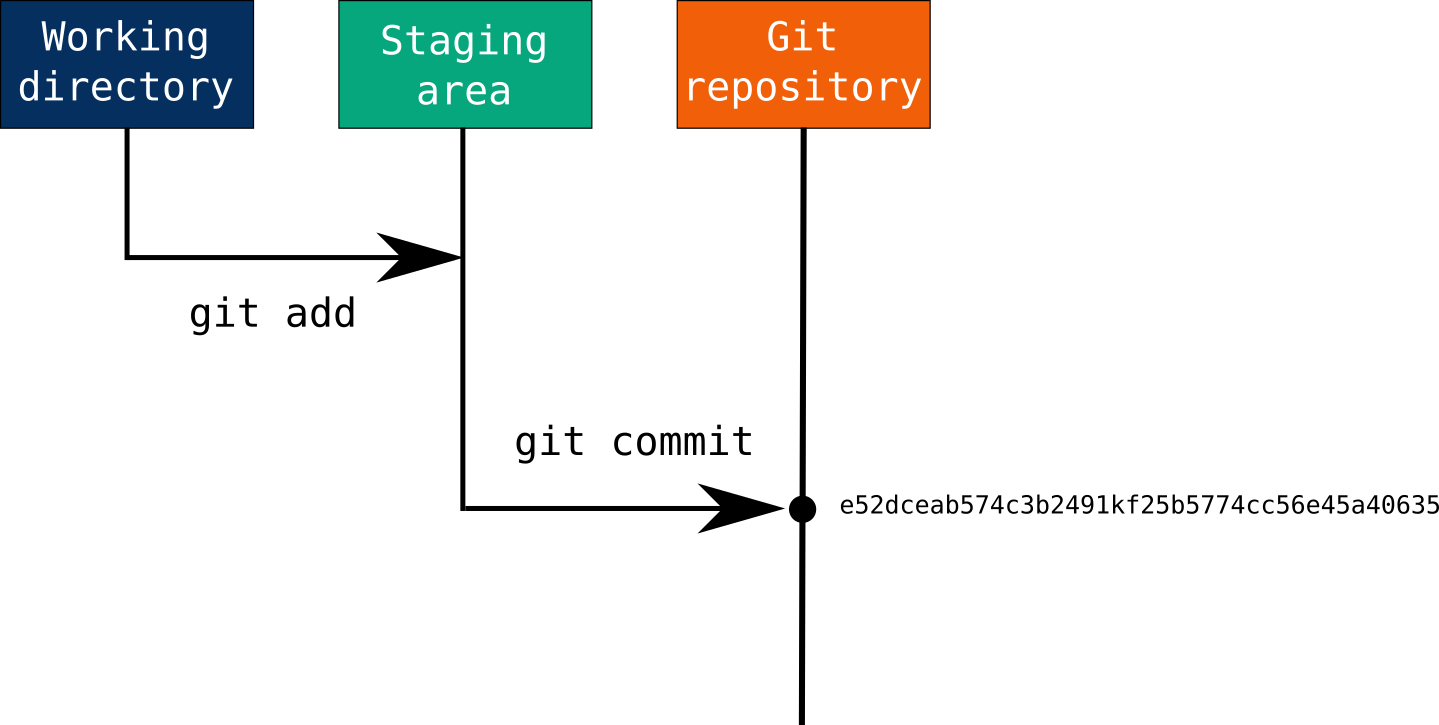
At its essence, git add is the command responsible for instructing Git to begin tracking changes to a file or set of files, staging them for the next commit. A “commit” in Git is a snapshot of your repository at a specific point in time, essentially saving your current progress. However, git add doesn’t directly create this snapshot; instead, it prepares the changes in what is known as the “staging area” or “index.”
Staging Changes for Drone Algorithms
The staging area is a unique intermediate step that differentiates Git from many other version control systems. Think of it as a waiting room where you meticulously select precisely which changes you want to include in your next commit. This granularity is invaluable in complex software projects like drone development. For instance, a developer might be working on several improvements to an autonomous drone’s pathfinding algorithm. They might have changed multiple lines in navigation_module.py, added a new configuration file mission_settings.json, and also made some unrelated comments in README.md.
With git add, the developer can selectively choose to stage only the changes related to the pathfinding algorithm and the new configuration file. They can leave the README.md changes unstaged, perhaps because those are still a work in progress or belong to a separate, less urgent commit. This selective staging allows for highly focused and logically coherent commits, making the project history cleaner and easier to understand, which is critical when debugging an unforeseen behavior in a drone’s flight during testing.
Tracking New Files and Modifications
git add performs several key functions:
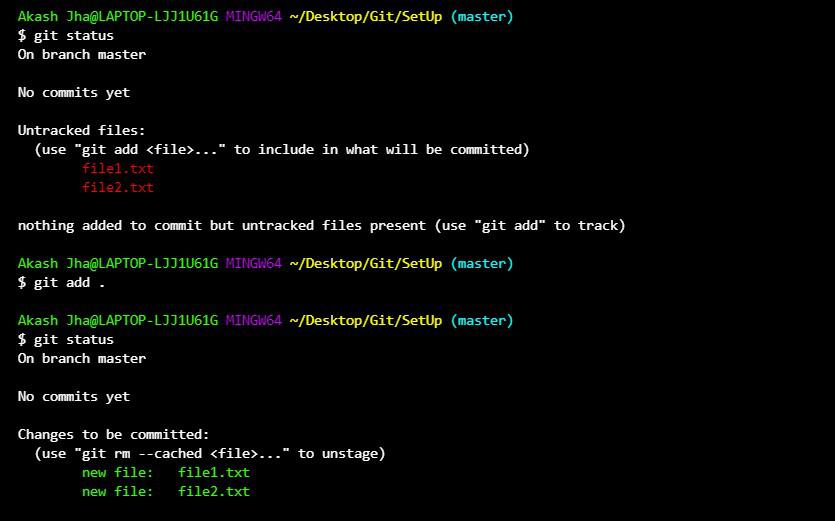
- Tracking New Files: When a developer creates a brand-new file, such as a new Python script for a drone’s object recognition library (
object_detector.py), Git doesn’t automatically know about it.git add object_detector.pyis the command that tells Git, “Hey, I’ve created this new file, and I want you to start tracking its changes.” Until this command is executed, the file remains “untracked” by Git. - Staging Modified Files: If a developer modifies an existing, already-tracked file (e.g., tweaking the parameters in
stabilization_system.cpp), Git registers that the file has changed. However, these modifications are initially in the “working directory” but not yet in the staging area.git add stabilization_system.cppbrings these modifications into the staging area, preparing them for the next commit. - Removing Files from Tracking (Indirectly): While
git rmis the direct command for removing tracked files, if a file is deleted from the working directory,git add -u(orgit add .in some contexts) can stage its deletion for the next commit. This ensures the repository’s history accurately reflects the removal of files that are no longer part of the drone’s software. - Staging Specific Changes (Patch Mode): For even finer control,
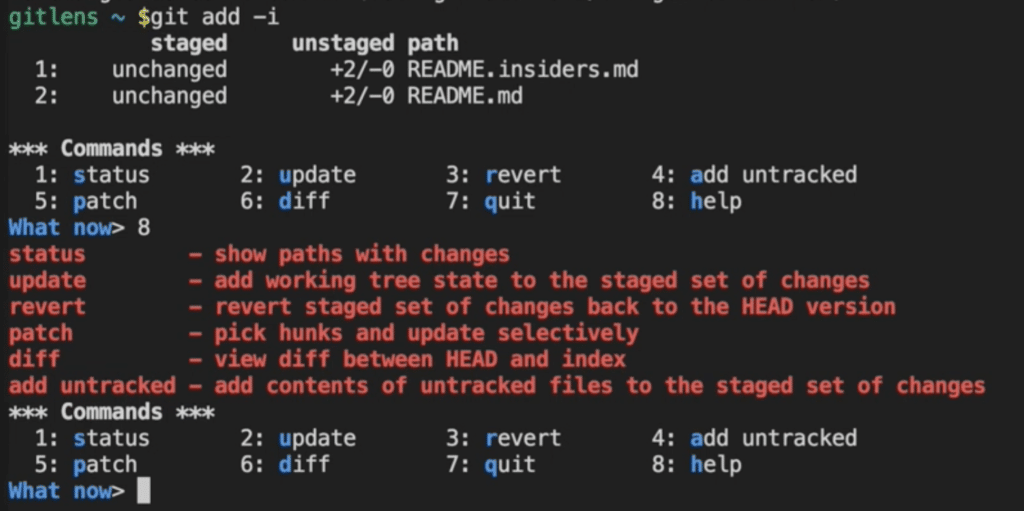
git add -p(orgit add --patch) allows developers to interactively review and stage specific “hunks” or sections of changes within a single file. This is immensely powerful when a file contains multiple, distinct modifications, and a developer only wants to commit a subset of them. For instance, ifflight_controller.ccontains both a bug fix for motor control and a new experimental feature for low-power mode,git add -penables staging only the bug fix for an immediate, critical commit.
Practical Applications in Drone Development Workflows
The judicious use of git add is integral to maintaining an efficient and reliable development workflow for drone-related innovations. Its flexibility allows teams to manage rapid iterations and complex integrations that are characteristic of advanced robotics and aerial systems.
Iterative Development for Autonomous Flight
Consider the development cycle for an autonomous flight system. Engineers might be constantly tweaking PID controllers, refining sensor fusion algorithms, or experimenting with new path planning strategies. Each change, however small, could have significant implications for flight stability and safety. With git add, a developer can make a series of small, logical changes:
- Adjust PID gains in
autopilot.cpp. - Test the drone’s response.
- If successful,
git add autopilot.cppand commit with a clear message like “Refactor: Optimized PID gains for hover stability.” - Then, they might introduce a new obstacle detection routine in
collision_avoidance.py. - After initial testing,
git add collision_avoidance.pyand commit with “Feature: Implemented preliminary LiDAR-based obstacle detection.”
This iterative process, facilitated by granular commits prepared with git add, creates a clean, searchable history. If a subsequent change introduces a bug (e.g., the drone starts drifting after the obstacle detection update), developers can easily pinpoint the exact commit that introduced the issue and revert or fix it without losing progress on other, unrelated features. This level of control is paramount when developing safety-critical software for drones.
Managing Configurations for Sensor Integration
Modern drones integrate a multitude of sensors: GPS, IMU, LiDAR, optical cameras, thermal cameras, and more. Each sensor often requires specific configuration files, calibration data, and integration scripts. As new sensors are added, or existing ones are updated (e.g., a new firmware for a thermal camera), the associated configuration files must be managed carefully.
When integrating a new high-resolution camera for mapping applications, a developer might:
- Add new driver files (
camera_driver.cpp). - Create a new configuration file (
camera_config.yaml) with resolution and frame rate settings. - Modify an existing file (
sensor_manager.h) to include the new camera in the sensor lineup.
Using git add, the developer can stage all these related files together. This ensures that the commit represents a complete and functional change (“Feature: Integrated new 4K mapping camera”) rather than fragmented pieces across multiple commits, which would complicate future debugging or feature rollback. It maintains the integrity of the sensor suite’s software definition, crucial for consistent performance in aerial mapping and remote sensing tasks.
Best Practices for git add in Tech & Innovation Projects
Mastering git add extends beyond merely knowing the command; it involves adopting best practices that contribute to a robust, understandable, and maintainable codebase, especially vital for complex drone systems.
Granular Commits for Clarity
One of the most significant advantages of the staging area is the ability to craft granular commits. Instead of adding all changes with git add . and committing everything at once, developers should strive to make commits that represent a single, logical unit of work. For example, if a developer is fixing a bug in the AI follow mode, adding a new telemetry logging feature, and refactoring some utility functions, these should ideally be three separate commits.
git add ai_follow_bug_fix.pythengit commit -m "Fix: Resolved unexpected jitter in AI follow mode."git add telemetry_logger.cppthengit commit -m "Feature: Added real-time telemetry logging for flight diagnostics."git add util_functions.h util_functions.cppthengit commit -m "Refactor: Improved readability of common utility functions."
This practice makes the project history much easier to navigate, simplifies code reviews (as reviewers can focus on one logical change at a time), and facilitates precise rollbacks if a specific feature or fix introduces an unforeseen issue. For drone software, where stability and predictable behavior are paramount, clear and atomic commits reduce the risk of introducing new errors and accelerate the debugging process.
Reviewing Staged Changes
Before committing, it is always a best practice to review what has been staged. The command git diff --staged (or git diff --cached) displays the differences between the staging area and the last commit. This allows developers to catch unintended changes, ensure that only relevant modifications are included in the upcoming commit, and verify that the code meets quality standards.
For instance, a developer might have inadvertently staged a temporary debug print statement or an incomplete configuration setting. Reviewing staged changes with git diff --staged provides a final sanity check, preventing these minor errors from being permanently recorded in the project history. In drone development, where a small configuration error could lead to suboptimal flight performance or even safety concerns, this review step is an indispensable part of the development workflow. By consciously using git add and reviewing staged changes, development teams contribute to a higher quality, more reliable, and ultimately more innovative drone ecosystem.