In the interconnected landscape of modern technology, particularly within the burgeoning field of aerial robotics and advanced imaging systems, the concept of Remote Procedure Call (RPC) servers plays a critical, albeit often unseen, role. While not directly a piece of hardware like a drone’s gimbal or a sensor’s optics, an RPC server acts as the invisible conductor orchestrating communication between disparate software components, enabling complex functionalities that are essential for everything from autonomous flight to sophisticated data acquisition. Understanding what an RPC server is and how it operates is fundamental to appreciating the underlying architecture of many innovative technological systems.
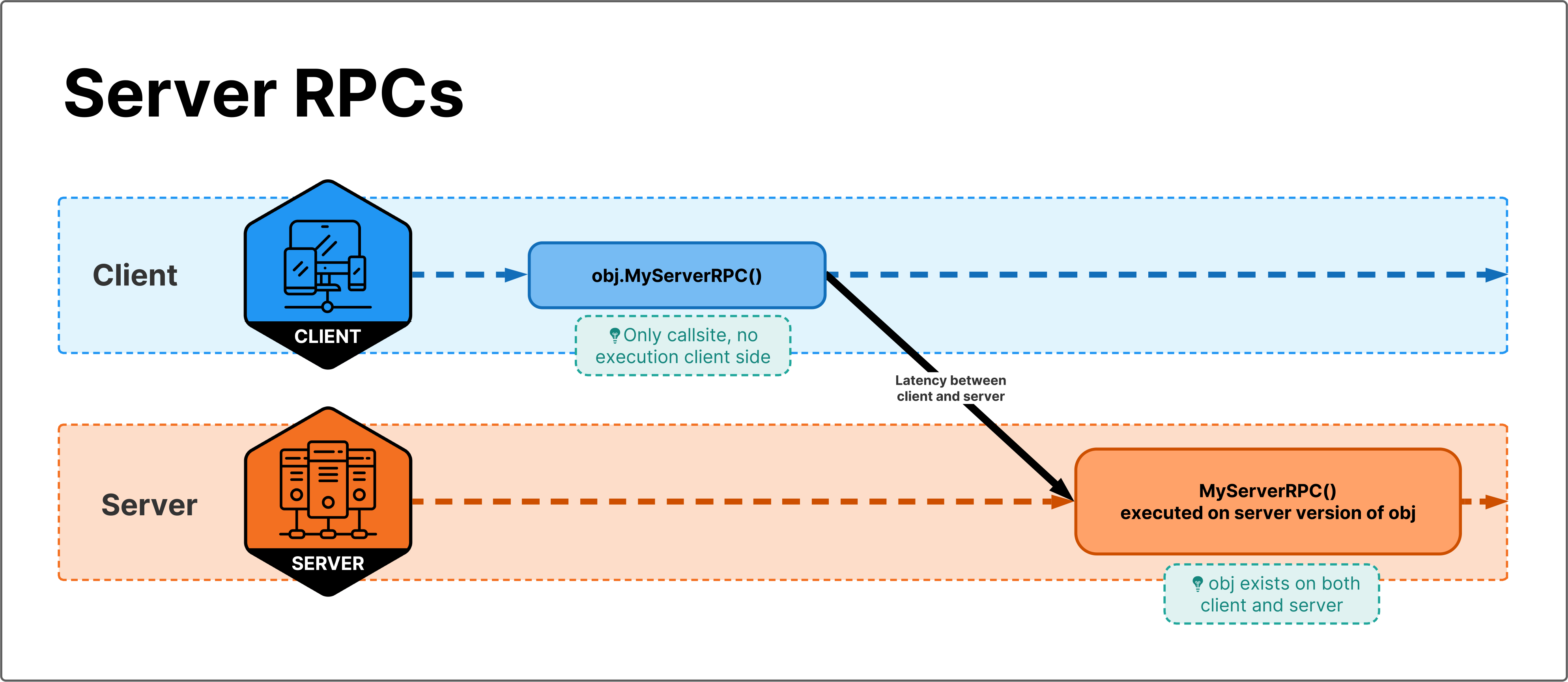
RPC, in its essence, is a protocol that allows a program running on one computer to execute a procedure (a function or method) on another computer as if it were a local call. This abstraction is incredibly powerful. Instead of developers needing to manage the intricacies of network communication – establishing connections, serializing data, sending requests, and handling responses – RPC handles all of that behind the scenes. The calling program simply “calls” a function, and the RPC framework takes care of the rest, ensuring the function executes on the designated remote server and its results are returned seamlessly.
The Core Functionality of an RPC Server
At its heart, an RPC server is a piece of software designed to listen for and respond to requests from RPC clients. These clients are other software programs, potentially running on different machines or even different processes on the same machine, that need to access functionality or data housed within the server. The server exposes a set of defined procedures or functions that clients can invoke. When a client makes an RPC call, it sends a request message to the server. This message typically includes the name of the procedure to be executed and any parameters required by that procedure.
The RPC server receives this request, decodes it, and then executes the specified procedure locally. Once the procedure has completed its execution, the server packages the results (or any error information) into a response message and sends it back to the client. The client then receives this response, unpacks it, and uses the results as if the procedure had run locally. This entire process is designed to be transparent to the application developer, allowing them to focus on the business logic rather than the distributed computing challenges.
How RPC Works: A Step-by-Step Breakdown
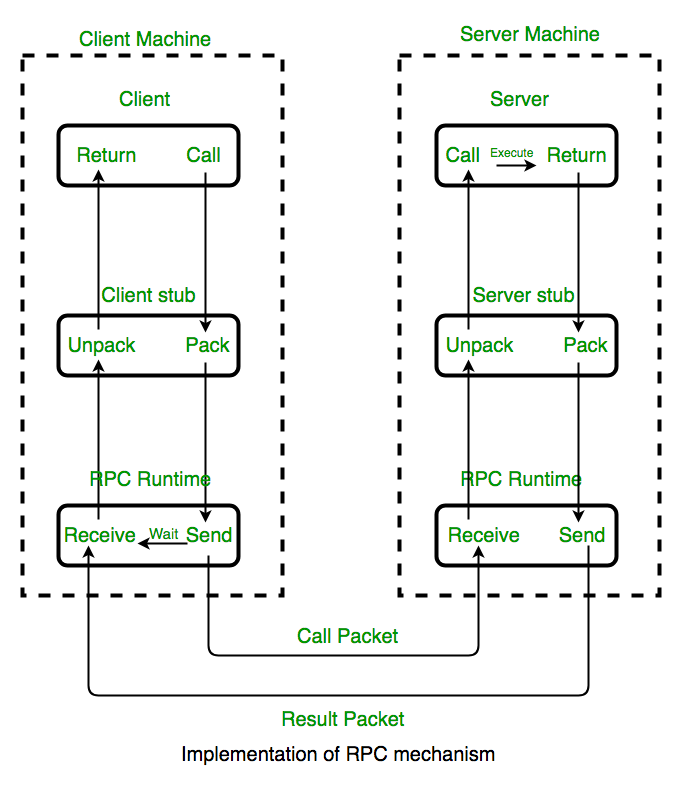
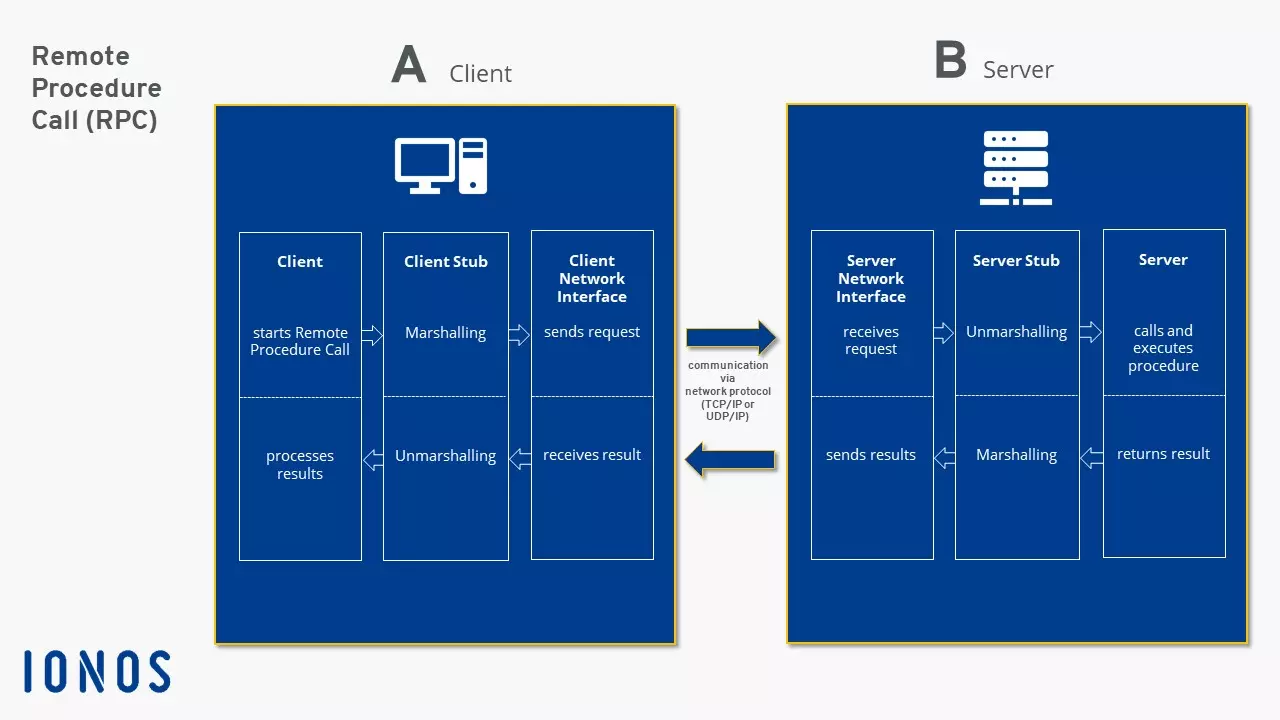
The underlying mechanism of RPC involves several key stages to facilitate this inter-process communication:
-
Client Stub: When an application intends to call a remote procedure, it doesn’t directly interact with the network. Instead, it calls a “stub” function that resides within the client’s address space. This client stub acts as a local proxy for the remote procedure.
-
Marshalling/Serialization: The client stub takes the procedure name and its arguments, converts them into a standardized format (like JSON, Protocol Buffers, or XML), and packages them into a network message. This process is known as marshalling or serialization. The goal is to transform data structures into a byte stream that can be transmitted across a network.
-
Client Runtime (Transport Layer): The client stub then passes this message to the client’s RPC runtime library. This library is responsible for managing the network connection and sending the message to the RPC server over the network, typically using protocols like TCP/IP or UDP.
-
Server Runtime: On the server side, the RPC runtime library receives the incoming network message. It then unpacks the message and identifies the requested procedure and its arguments.
-
Server Stub (Skeleton): The server runtime passes the decoded request to a “skeleton” function (sometimes also referred to as a server stub) associated with the requested procedure. This skeleton acts as the entry point for the remote procedure on the server.
-
Procedure Execution: The server skeleton then calls the actual implementation of the procedure on the server.
-
Unmarshalling/Deserialization (Server Side): Once the procedure has finished executing on the server, its return values (or any error information) are packaged by the server skeleton. This data is then serialized (marshalled) into a network message by the server runtime.
-
Response Transmission: The server runtime sends the response message back to the client over the network.
-
Client Runtime (Receiving): The client runtime receives the response message and passes it to the client stub.
-
Unmarshalling/Deserialization (Client Side): The client stub unmarshalls (deserializes) the response message, extracting the return values.
-
Return to Client Application: The client stub then returns these values to the original calling application, making it appear as though the procedure was executed locally.
RPC Servers in Drone and Flight Technology Applications
The principles of RPC are particularly relevant in the context of drones and advanced flight technology. Consider the complexity of a modern unmanned aerial vehicle (UAV). A drone is not a single monolithic entity; it’s a system comprised of numerous interconnected components, each often running its own software.
For instance, the flight controller module might manage navigation and stability. The gimbal controller might handle camera positioning. The onboard computer might be responsible for advanced processing like AI-driven object detection or waypoint planning. If these components are running on separate processors or even different boards, they need a robust way to communicate. This is where RPC servers and clients become indispensable.
Autonomous Flight and Mission Planning
In autonomous flight, a mission planner might reside on a ground control station (GCS) or a powerful onboard computer. This planner needs to send commands to the drone’s flight controller, such as “fly to coordinates X, Y, Z” or “execute this predefined flight path.” The flight controller, in turn, needs to report its status, current position, battery level, and any sensor readings back to the GCS or the onboard computer for monitoring and further decision-making. An RPC server running on the flight controller could expose functions like setWaypoint(x, y, z), getStatus(), or getBatteryLevel(). The mission planning software on the GCS would act as the RPC client, calling these functions remotely.
Real-time Data Streaming from Sensors and Cameras
Similarly, imagine a drone equipped with high-resolution cameras and various sensors (LiDAR, thermal imagers, ultrasonic sensors). The data generated by these devices is often processed onboard or streamed back to a ground station for analysis. An RPC server could be implemented on the processing unit responsible for camera control. It might offer functions like setCameraAngle(pitch, yaw), startRecording(), or captureImage(). The client application, perhaps a pilot’s interface or an automated image processing pipeline, would call these functions to manage the camera system.
For sensor data, an RPC server on the sensor processing module could expose functions like getLatestLidarScan(), getThermalImage(), or getGPSCoordinates(). The client could then request this data in real-time, allowing for applications like obstacle avoidance, terrain mapping, or detailed aerial inspections. The ability to request specific data points or initiate specific data capture events via RPC significantly streamlines the development of complex, data-intensive drone applications.
Interfacing with Onboard AI and Machine Learning
As drones become more intelligent, incorporating AI for tasks like object recognition, tracking, and scene understanding, RPC servers are crucial for enabling these sophisticated capabilities. An AI module running onboard might offer a suite of machine learning models. An RPC server could expose functions such as detectObjects(imageFrame), trackTarget(targetID), or classifyScene(sensorData). A separate component, perhaps the flight controller itself, could then act as an RPC client, querying the AI module for information to inform its flight decisions. For example, the flight controller might call detectObjects and, if a person is detected, automatically adjust the flight path or initiate a tracking sequence.
Advantages of Using RPC in Flight Systems
The adoption of RPC servers in flight technology offers several compelling advantages:
Decoupling and Modularity
RPC promotes a modular design. Different software components can be developed and deployed independently, as long as they adhere to the agreed-upon RPC interface. This decoupling makes systems easier to maintain, update, and scale. A change to the internal implementation of a procedure on the server doesn’t necessarily require changes to the client, provided the interface (function signature and expected return values) remains the same.
Abstraction of Network Complexity
Developers are shielded from the low-level complexities of network programming. They can write code that appears to be making local function calls, while the RPC framework handles the underlying network communication, serialization, and deserialization. This significantly reduces development time and the potential for network-related bugs.
Resource Efficiency
RPC can be more efficient than other communication methods in certain scenarios. By allowing direct calls to remote procedures, it avoids the overhead associated with setting up and tearing down long-lived network connections for every single interaction. The use of efficient serialization formats can also minimize the amount of data that needs to be transmitted over the network, which is particularly important for bandwidth-constrained drone communications.
Scalability and Distribution
RPC naturally supports distributed architectures. As drone systems grow in complexity, incorporating more sensors, processing units, and control modules, RPC allows these components to be distributed across multiple machines or processors while still communicating seamlessly. This enables the creation of more powerful and feature-rich aerial platforms.
Popular RPC Frameworks
While the concept of RPC is generic, several popular frameworks implement these principles, each with its own strengths and specific use cases. For applications in flight technology, choices might include:
- gRPC (gRPC Remote Procedure Calls): Developed by Google, gRPC is a high-performance, open-source universal RPC framework. It uses Protocol Buffers as its interface definition language and HTTP/2 for transport. gRPC is known for its efficiency, strong performance, and support for features like bidirectional streaming, load balancing, and authentication. Its use in embedded systems and microservices makes it a strong candidate for drone applications.
- Apache Thrift: Another popular open-source framework, Thrift supports a wide range of programming languages and offers a robust set of features for building scalable and high-performance services. It also uses an IDL to define interfaces and supports various transport protocols.
- ZeroMQ (ØMQ) / ZAP (ZeroMQ RPC Protocol): While not a traditional RPC framework in the strict sense, ZeroMQ is a powerful messaging library that can be used to build RPC-like communication patterns. It offers a flexible socket API and can be used to create highly scalable and resilient distributed systems. RPC patterns can be built on top of its messaging capabilities.
The choice of framework often depends on factors such as the required performance, the programming languages used in the system, the complexity of the data being exchanged, and the need for specific features like streaming or authentication.
Conclusion
In summary, an RPC server is a fundamental architectural component that enables distributed software systems to communicate effectively. By allowing a program to execute a procedure on a remote machine as if it were local, RPC abstracts away network complexities, promotes modularity, and facilitates the creation of sophisticated, interconnected systems. In the rapidly evolving world of drones and flight technology, where complex functionalities like autonomous navigation, real-time sensor data processing, and advanced AI capabilities are paramount, RPC servers act as the vital conduits that make these innovations possible. Understanding their role is key to appreciating the intricate software engineering that underpins the capabilities of modern aerial vehicles.