In the rapidly evolving world of uncrewed aerial vehicles (UAVs), commonly known as drones, precision, stability, and autonomous capability are not mere features but fundamental requirements. Beneath the sleek casings and whirring propellers lies a sophisticated interplay of physics and engineering, largely governed by a core mathematical concept: the vector quantity. Without a deep understanding and precise application of vector quantities, the intricate dance of a drone navigating complex airspace, stabilizing against gusts of wind, or executing a perfect cinematic shot would be impossible. This article delves into what a vector quantity is and illuminates its critical role in various facets of drone flight technology, from basic navigation to advanced autonomous systems.
The Core Concept: Defining Vector Quantities in Flight
At its heart, a vector quantity is a physical quantity that possesses both magnitude (size) and direction. This dual characteristic sets it apart from scalar quantities, which only have magnitude. Understanding this distinction is the bedrock upon which all sophisticated flight technology is built.
Scalars vs. Vectors: A Fundamental Distinction
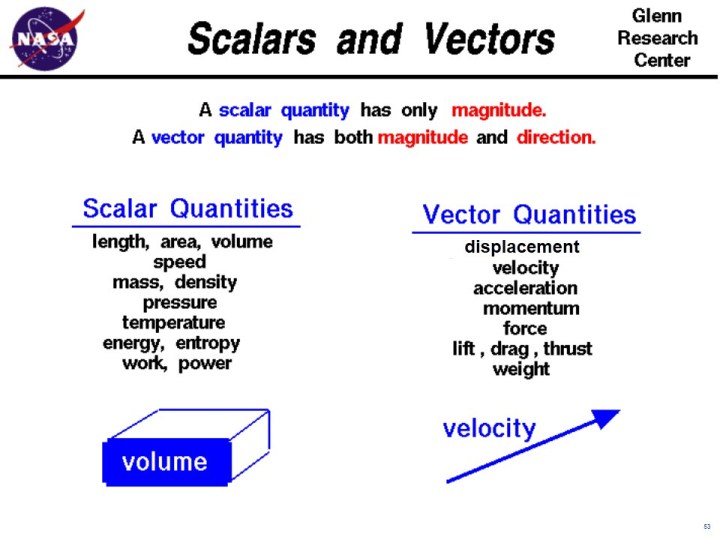
To appreciate the significance of vectors, it’s essential to understand their contrast with scalars. A scalar quantity is fully described by its numerical value alone. Examples include:
- Speed: A drone might be flying at 10 meters per second (m/s). This tells us how fast it’s moving, but not where it’s going.
- Distance: The total path length covered by a drone, say 500 meters, without regard for its start or end points in relation to each other.
- Mass: The drone’s mass, perhaps 1.5 kilograms, is just a value.
- Temperature: The ambient air temperature, e.g., 25 degrees Celsius.
In contrast, a vector quantity requires both a numerical value and a specified direction to be fully understood. Think of it as an arrow: the length of the arrow represents the magnitude, and the way it points represents the direction. Examples relevant to drones include:
- Velocity: A drone flying at 10 m/s north. Here, both the speed (magnitude) and the direction (north) are given. If the drone changes direction but maintains speed, its velocity has changed.
- Displacement: The straight-line distance and direction from a drone’s starting point to its ending point. If a drone flies 100m north, then 100m east, its distance covered is 200m, but its displacement is a vector pointing northeast, with a magnitude of approximately 141m.
- Acceleration: The rate of change of velocity. If a drone is speeding up or slowing down, or changing direction, it is accelerating. This is crucial for smooth maneuvers.
- Force: A push or a pull on the drone. For example, the thrust from a propeller is a force vector pointing upwards and slightly outwards, depending on the propeller’s angle. Wind acting on a drone is another force vector.
- Torque: A rotational force, essential for changing the drone’s orientation (pitch, roll, yaw).
Key Vector Quantities in Drone Dynamics
Several key vector quantities are fundamental to understanding how drones operate:
- Position Vector: Describes the location of the drone in 3D space relative to an origin (e.g., its takeoff point or a GPS coordinate).
- Velocity Vector: As discussed, this defines the drone’s speed and direction of travel. In 3D space, this would have components for forward/backward, left/right, and up/down movement.
- Acceleration Vector: Indicates how the drone’s velocity is changing over time. This is what makes a drone speed up, slow down, or turn.
- Force Vectors: Each propeller generates a thrust force vector. Gravity exerts a downward force vector. Wind creates a drag force vector. The sum of these forces determines the drone’s overall motion.
- Angular Velocity Vector: Describes how fast and in what direction the drone is rotating around its own axes (pitch, roll, yaw). This is vital for maintaining orientation and executing rotations.
- Torque Vectors: Forces applied at a distance from the center of mass create torques, causing the drone to rotate. Precisely controlling these torques is how a drone changes its pitch, roll, or yaw.
Vectors in Drone Navigation and Positioning
The ability of a drone to know where it is, where it’s going, and how to get there with precision relies almost entirely on the accurate processing of vector data.
GPS and Position Vectors
The Global Positioning System (GPS) is arguably the most recognized navigation technology, and it operates fundamentally on the principle of position vectors. A GPS receiver on a drone calculates its 3D position by receiving signals from multiple satellites. Each satellite transmits its precise location and the time the signal was sent. By measuring the time delay for signals from at least four satellites, the drone can calculate its distance to each satellite. These distances, combined with the known positions of the satellites (which are themselves position vectors relative to Earth’s center), allow the drone’s flight controller to triangulate its own position as a unique position vector in a global coordinate system. This position vector is often expressed in latitude, longitude, and altitude. For relative navigation, these global coordinates are then converted into a local Cartesian coordinate system where the drone’s position is (x, y, z) relative to a takeoff point, making it easier for the flight controller to manage local movements.
Velocity and Displacement for Precise Flight Paths
For a drone to follow a pre-programmed flight path or respond to controller inputs, it continuously calculates and adjusts its velocity and displacement vectors. When a pilot commands the drone to move forward, the flight controller doesn’t just increase “speed”; it generates a desired velocity vector (e.g., 5 m/s in the forward direction). The onboard sensors then provide the current actual velocity vector, and the system works to minimize the difference between the desired and actual vectors.
Waypoints in autonomous flight are essentially target position vectors. The drone’s flight control system calculates the displacement vector (the difference between its current position vector and the next waypoint’s position vector) and then generates a series of velocity vectors to smoothly travel along that displacement. This involves sophisticated algorithms that account for acceleration and deceleration to ensure smooth, efficient, and precise movement from one point to the next, crucial for applications like surveying, mapping, or aerial filmmaking where consistent speed and direction are paramount.

The Role of Inertial Navigation Systems (INS)
While GPS provides absolute position, it can be slow to update or susceptible to signal loss. This is where Inertial Navigation Systems (INS) come into play, providing real-time, high-frequency updates on the drone’s motion using internal sensors. An INS primarily uses:
- Accelerometers: These sensors measure proper acceleration (acceleration relative to freefall) along three orthogonal axes. This data is raw acceleration vector information.
- Gyroscopes: These measure angular velocity, which describes the rate of rotation around three axes (pitch, roll, yaw). This is raw angular velocity vector information.
By continuously integrating the acceleration vectors over time, the INS can estimate the drone’s velocity vector. Integrating the velocity vectors then yields the drone’s displacement vector and, subsequently, its position vector. Similarly, integrating angular velocity vectors provides the drone’s current orientation (attitude). While INS data can drift over time, it provides excellent short-term accuracy, making it an indispensable complement to GPS. Sensor fusion algorithms combine the absolute accuracy of GPS with the high-frequency precision of INS data, creating a robust and accurate estimate of the drone’s navigation state.
Stabilization and Control: Harnessing Vector Physics
The inherent instability of multi-rotor drones means that constant, precise adjustments are required to keep them aloft and stable. This is where the principles of force and torque vectors become paramount, managed by the drone’s flight controller and its complex algorithms.
Forces and Torques: The Engines of Stability
Each propeller on a multi-rotor drone generates a thrust force vector, which typically points upwards and slightly inwards depending on the propeller’s tilt. By independently controlling the speed of each motor, the flight controller manipulates these thrust vectors.
- Vertical Movement: To ascend, all propellers increase thrust simultaneously, increasing the net upward force vector, overcoming the downward force vector of gravity. To descend, thrust is reduced.
- Horizontal Movement: To move forward, the rear propellers increase thrust slightly while the front propellers decrease it, causing the drone to tilt forward (pitch). This tilt redirects the combined thrust vector to have a forward horizontal component. Similar adjustments cause left/right movement (roll).
Crucially, any imbalance in thrust creates a torque vector that causes the drone to rotate. For instance, if the left propellers spin faster than the right, it creates a roll torque. The flight controller’s job is to precisely manage these torques to maintain a desired orientation and to induce controlled rotations for maneuvers.
Attitude and Orientation Control
The drone’s “attitude” refers to its orientation in space, typically defined by three rotational angles:
- Pitch: Rotation around the lateral (side-to-side) axis, causing the nose to point up or down.
- Roll: Rotation around the longitudinal (front-to-back) axis, causing one wing to dip.
- Yaw: Rotation around the vertical axis, causing the drone to turn left or right horizontally.
These rotational movements are controlled by precise torque vectors. The drone’s Inertial Measurement Unit (IMU), containing accelerometers and gyroscopes, continuously measures the current pitch, roll, and yaw rates (angular velocity vectors) and orientations. A PID (Proportional-Integral-Derivative) controller, a sophisticated control loop mechanism, takes these measurements, compares them to desired setpoints, and calculates the necessary adjustments to each motor’s thrust. These adjustments generate counter-torques to stabilize the drone or induce desired rotations. This real-time feedback loop, processing vector data from the IMU and generating corrective thrust vectors, is what gives drones their incredible stability and maneuverability.
Dealing with External Disturbances
One of the most impressive feats of drone flight technology is its ability to maintain stability in challenging environmental conditions, particularly wind. Wind is essentially an external force vector acting on the drone. When a drone encounters a gust of wind, the flight controller’s sensors detect the resulting changes in the drone’s attitude and acceleration. For example, a sudden side wind might push the drone sideways and cause it to roll. The IMU detects this unexpected roll (an angular velocity vector) and side acceleration (an acceleration vector). The PID controller immediately calculates and applies opposing thrust vectors from the propellers to generate counter-torques and forces, bringing the drone back to its desired orientation and position. This constant, dynamic compensation for external vector forces is vital for reliable and safe drone operation.
Advanced Applications: Vectors in Autonomous Flight and Sensor Fusion
As drone technology advances, the application of vector quantities moves beyond basic control to sophisticated autonomous functions, demanding even more complex vector processing.
Obstacle Avoidance and Path Planning
Autonomous obstacle avoidance is a prime example of advanced vector application. Drones equipped with various sensors—such as optical cameras, lidar, ultrasonic sensors, or radar—gather data about their surroundings. Each sensor detects objects and determines their distance and direction relative to the drone. This information is processed as relative position vectors for each detected obstacle.
The drone’s onboard computer then builds a real-time 3D map of its environment, where each obstacle is represented by its position and dimensions (often simplified as bounding boxes). When the drone is programmed to fly a certain path, it continuously checks if its intended future position vector will intersect with any obstacle’s position vector. If an intersection is predicted, the path planning algorithm generates an alternative flight path—a series of new displacement vectors—that safely navigates around the obstacle while still aiming towards the original target. This involves complex vector mathematics to calculate trajectories, collision probabilities, and optimal avoidance maneuvers, all executed within milliseconds.
Sensor Fusion: A Symphony of Vector Data
Modern drone navigation and control systems rarely rely on a single sensor. Instead, they employ “sensor fusion,” combining data from multiple disparate sensors to achieve a more robust and accurate estimate of the drone’s state. This is a critical area where vector mathematics is heavily utilized.
- GPS (Position Vector): Provides absolute, albeit sometimes noisy, position and velocity.
- IMU (Acceleration and Angular Velocity Vectors): Provides high-frequency, relative motion data.
- Magnetometer (Direction Vector): Provides heading information relative to Earth’s magnetic field.
- Barometer (Scalar Altitude converted to Altitude Vector Component): Measures atmospheric pressure to estimate altitude.
- Vision Sensors (Optical Flow Vectors, Relative Position Vectors): Used for estimating velocity relative to the ground (optical flow) or detecting obstacles.
Sensor fusion algorithms, such as Kalman filters or Extended Kalman filters, take these diverse inputs—many of which are directly vector quantities or can be converted into vector components—and integrate them. By statistically weighing the reliability and error characteristics of each sensor, these algorithms produce a single, highly accurate, and continuous estimate of the drone’s current position vector, velocity vector, acceleration vector, and attitude vectors. This fused vector data is then fed to the flight controller for precise command generation.
AI and Machine Learning: Optimizing Vector Control
Artificial intelligence (AI) and machine learning (ML) are increasingly being integrated into drone flight technology, particularly for autonomous and adaptive control. These advanced systems often work by optimizing the drone’s response to various vector inputs and outputs.
- AI Follow Mode: An AI system tracks a target (e.g., a person or vehicle), continuously calculating its relative position and velocity vectors. The AI then generates optimal drone velocity and acceleration vectors to maintain a desired distance and angle, even predicting future movements of the target.
- Autonomous Flight Optimization: ML algorithms can analyze vast amounts of flight data (sensor inputs, control outputs, environmental conditions) to learn optimal thrust and torque vector adjustments for different flight scenarios. This allows drones to adapt to changing payloads, wind conditions, or perform highly complex maneuvers with unprecedented smoothness and efficiency.
- Remote Sensing and Mapping: In applications like mapping, drones capture imagery while meticulously following pre-defined flight paths (vector sequences). AI can analyze this data, correlate images with precise geo-referenced position vectors, and construct highly accurate 3D models or maps, improving the quality and consistency of the resulting geospatial data.
Conclusion
From the fundamental principles of motion to the cutting-edge capabilities of autonomous flight, vector quantities are the invisible architects of modern drone technology. They provide the mathematical language to describe everything from a drone’s precise location and movement in three-dimensional space to the intricate forces and torques that govern its stability and maneuverability. Whether it’s the triangulation of GPS signals, the real-time adjustments for wind gusts, or the complex calculations for avoiding obstacles, every aspect of a drone’s flight technology relies on the accurate understanding and manipulation of vector data. As drones continue to evolve, becoming smarter, more autonomous, and more capable, the mastery of vector physics will remain at the forefront of innovation, pushing the boundaries of what these incredible flying machines can achieve.