Nvidia Optimus is a proprietary technology developed by Nvidia that intelligently switches between a computer’s integrated graphics processor (iGPU) and a discrete graphics processing unit (dGPU) to optimize power consumption and performance. While its primary application is in laptops, its underlying principles and benefits have relevance to various tech applications, including the burgeoning field of drone technology. Understanding Optimus is key to appreciating how computational power can be dynamically managed for efficiency and enhanced capability, a crucial aspect in the advancement of sophisticated unmanned aerial vehicles (UAVs).
The Core Concept: Dynamic Graphics Switching
At its heart, Nvidia Optimus is a power management solution. Modern laptops typically feature two graphics processors:
- Integrated Graphics Processor (iGPU): Built directly into the CPU, the iGPU is highly power-efficient and suitable for everyday tasks like web browsing, word processing, and basic video playback. It consumes minimal power and generates less heat.
- Discrete Graphics Processing Unit (dGPU): A separate, more powerful chip dedicated to graphics rendering. dGPUs are essential for demanding tasks such as gaming, video editing, 3D modeling, and, crucially, complex computational processing required for advanced drone operations.
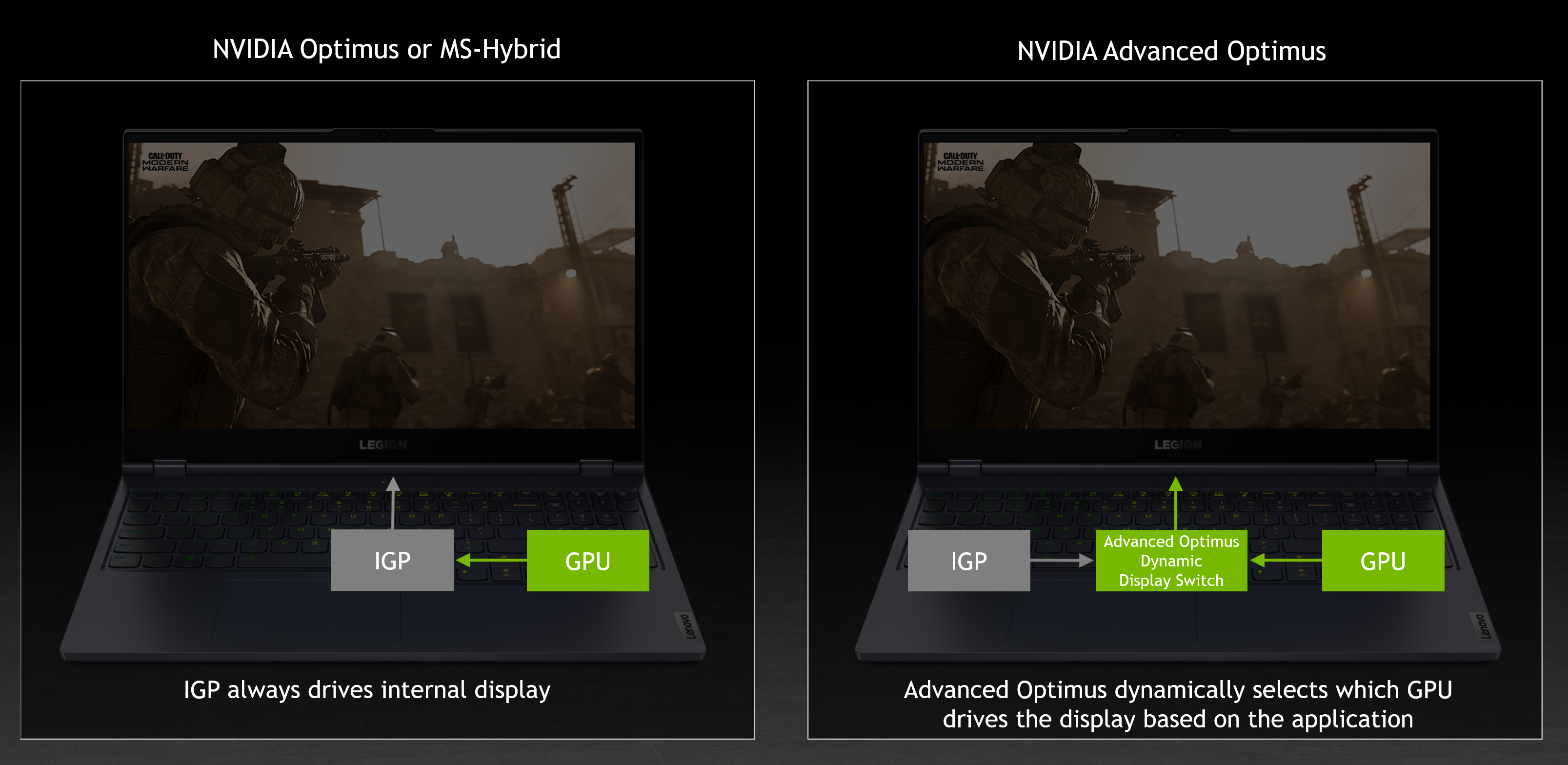
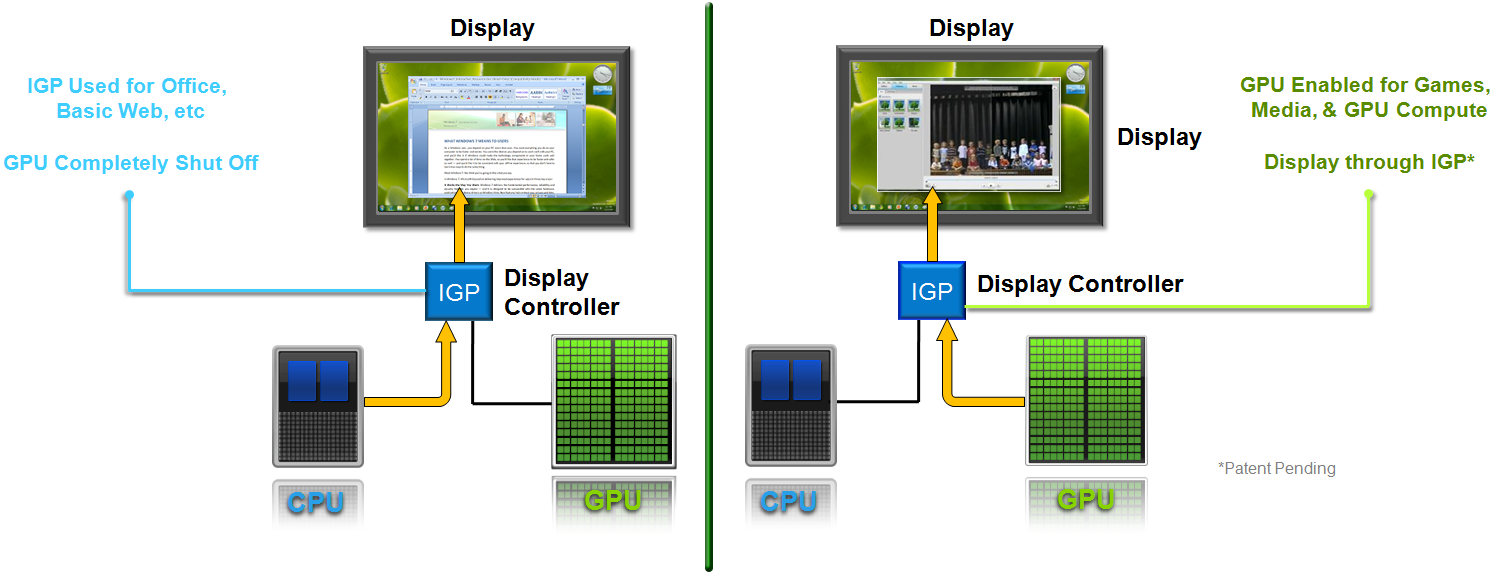
Historically, users had to manually choose which graphics processor to use, or the system would default to the more power-hungry dGPU, leading to significantly reduced battery life and increased heat. Nvidia Optimus automates this process. When a lightweight application is running, Optimus keeps the dGPU in a low-power state, drawing power only from the iGPU. However, when a graphics-intensive application is launched, Optimus seamlessly activates the dGPU, rerouting the display output to leverage its superior processing power. Once the demanding application is closed, Optimus powers down the dGPU, returning to the power-efficient iGPU.
This dynamic switching is what makes Optimus so valuable. It offers the best of both worlds: the extended battery life of integrated graphics for casual use and the raw power of a dedicated graphics card when needed. This on-demand performance is a significant leap forward in mobile computing efficiency.
How Optimus Achieves Seamless Switching
The magic behind Optimus lies in its sophisticated driver architecture and hardware integration. Unlike older technologies that might have required a reboot or a noticeable lag, Optimus aims for a near-instantaneous and transparent transition.
The Role of the Display Controller
One of the key enablers of Optimus is how it manages the display output. Instead of the dGPU directly outputting to the screen, the dGPU’s rendered frames are passed to the iGPU. The iGPU then acts as a multiplexer, sending the final image to the laptop’s display. This allows the dGPU to be powered down entirely when not in use, as it doesn’t need to maintain a constant connection to the display.
Driver-Level Intelligence
The Optimus drivers are designed to monitor application activity. They maintain a database of applications and their graphics demands. When an application known to require significant graphical resources is launched, the drivers instruct the system to activate the dGPU. Conversely, when the application is closed, the drivers signal the dGPU to enter its power-saving state.
Application Profiles
Nvidia maintains extensive profiles for a vast array of applications, including games, professional software, and even specific web browsers. These profiles help the Optimus drivers accurately determine when the dGPU should be engaged. Users can also often manually configure profiles for specific applications if they find the automatic detection isn’t optimal.
Optimus and its Relevance to Drone Technology
While Nvidia Optimus is primarily a laptop technology, its core principles of intelligent power management and dynamic processing are highly relevant to the evolution of drone technology, particularly in the areas of onboard computation, payload processing, and flight autonomy.
Onboard Computation and Payload Processing
Modern drones are increasingly equipped with sophisticated sensors and cameras, generating vast amounts of data in real-time. Processing this data onboard the drone is critical for applications like:
- Object Recognition and Tracking: Identifying and following specific objects or people for surveillance, delivery, or cinematography.
- Obstacle Avoidance: Detecting and navigating around physical obstructions in real-time.
- Environmental Mapping: Creating detailed 3D maps of the surroundings for inspection or surveying.
- Sensor Fusion: Combining data from multiple sensors (e.g., GPS, IMU, lidar, cameras) to create a more comprehensive understanding of the drone’s environment.
These tasks demand significant computational power, often requiring dedicated processing units. However, drones operate under strict power and weight constraints. This is where the Optimus concept becomes particularly pertinent.
The “Optimus-like” Drone Processor
Imagine a drone’s onboard computer system designed with a similar philosophy to Nvidia Optimus. It could feature:
- A Low-Power Primary Processor: Capable of handling basic flight control, communication, and routine sensor data acquisition. This would be the default state, conserving battery power during transit or non-critical operations.
- A High-Performance Secondary Processor (GPU or AI Accelerator): This specialized processor would be activated only when demanding tasks, such as real-time image analysis, complex navigation calculations, or AI-driven decision-making, are required.
This dynamic allocation of processing resources would allow drones to perform computationally intensive tasks without sacrificing flight time. For instance, a drone conducting aerial surveying might only need its full processing power when actively scanning an area, reverting to a lower power state during transit to the next survey point.
Real-Time Video Analysis
For FPV (First-Person View) drones and those used for cinematic purposes, real-time video processing is essential. This could involve:
- Image Stabilization: Smoothing out jerky footage.
- Video Encoding/Decoding: Preparing footage for transmission or recording.
- AI-Powered Subject Tracking: Keeping a moving subject in frame for professional filmmaking.
A system akin to Optimus would allow the drone to use its primary processor for basic video streaming but then instantly switch to a more powerful GPU when advanced video effects or tracking algorithms need to be applied. This ensures high-quality output without constantly draining the battery.
Flight Autonomy and AI Integration
The drive towards fully autonomous drones, capable of navigating complex environments and making independent decisions, relies heavily on artificial intelligence and advanced algorithms. These algorithms often benefit from the parallel processing capabilities of GPUs.
AI Co-pilots
Consider an autonomous drone tasked with inspecting a wind turbine. It needs to navigate to the turbine, fly precise patterns around it, and identify potential defects in its blades. This requires:
- Real-time Sensor Data Processing: Lidar for precise distance measurement, cameras for visual inspection.
- AI Models for Defect Detection: Trained neural networks to identify cracks, erosion, or other damage.
- Path Planning and Collision Avoidance: Dynamic route adjustments to avoid unexpected obstacles.
An “Optimus-like” architecture could allow the drone’s central flight controller to handle basic navigation and communication, while a powerful AI processing unit is activated only when the AI models need to perform detailed analysis or when complex evasive maneuvers are required. This prevents the AI from constantly running at full capacity, which would be highly inefficient.
Enhanced Navigation Systems
Beyond standard GPS, advanced drones employ visual odometry, SLAM (Simultaneous Localization and Mapping), and other sensor-fusion techniques for precise positioning and navigation in GPS-denied environments (e.g., indoors, under dense foliage). These techniques are computationally intensive.
An Optimus-inspired approach would enable the drone to use its basic sensors and processing for general flight but then engage a more powerful computational engine for intensive mapping and localization when navigating through challenging terrain or complex structures. This allows for greater accuracy and reliability without a constant drain on power.
Power Management in High-Performance Drones
High-performance drones, especially those designed for industrial applications, research, or defense, often carry heavier payloads and require more processing power. The limited battery life remains a critical bottleneck.
Efficient Resource Allocation
By intelligently switching processing resources, similar to how Optimus manages graphics in laptops, a drone can:
- Maximize Flight Time: By utilizing low-power modes for non-essential tasks.
- Ensure Performance When Needed: By instantly activating powerful processors for critical operations.
- Reduce Thermal Load: By only running high-power components when necessary, leading to better component longevity and reliability.
This adaptive power management is crucial for extending the operational envelope of advanced UAVs, allowing them to perform longer missions, cover larger areas, and execute more complex tasks.
Challenges and Future Directions
While the concept of an “Optimus-like” system for drones is conceptually sound, several technical challenges need to be addressed for its full realization:
Integration Complexity
Integrating different processing units (CPUs, GPUs, AI accelerators) onto a compact drone platform requires careful design. Ensuring seamless communication and data transfer between these units, along with efficient power delivery and thermal management, is a significant engineering feat.
Software Ecosystem
A robust software ecosystem is required to manage the dynamic switching of processing resources. This includes intelligent drivers, application-level APIs that can signal processing needs, and operating systems capable of efficiently allocating tasks to different hardware.
Standardization
As drone technology advances, standardization of processing architectures and communication protocols will become increasingly important. This will facilitate the development of modular and upgradeable drone systems, akin to how laptop components can be updated.
Power Delivery and Battery Technology
Even with efficient processing, the overall power demands of advanced drones will continue to push the limits of current battery technology. Improvements in battery density and charging speeds will be essential complements to intelligent processing management.

Conclusion
Nvidia Optimus, a pioneering technology in dynamic graphics switching for laptops, offers a compelling blueprint for the future of onboard computation in drone technology. By intelligently managing processing power between low-power and high-performance units, drones can achieve enhanced capabilities—from real-time AI analysis and complex mapping to robust obstacle avoidance and autonomous flight—without compromising their crucial operational endurance. As the complexity and autonomy of UAVs continue to grow, embracing “Optimus-like” principles of adaptive resource allocation will be fundamental to unlocking their full potential and pushing the boundaries of aerial technology.