The Foundation of Movement in Flight Technology
Understanding the fundamental principles governing motion is paramount in the realm of flight technology. At the heart of this understanding lies the concept of net force. This invisible yet powerful quantity dictates how aircraft, from the smallest micro-drones to the largest commercial airliners, behave in the air. In essence, net force is the resultant of all individual forces acting upon an object. Without a grasp of this concept, the sophisticated navigation, stabilization, and autonomous flight systems that define modern aviation would be inexplicable. This article delves into the definition and significance of net force, exploring its components and its profound impact on flight technology.

Defining Net Force
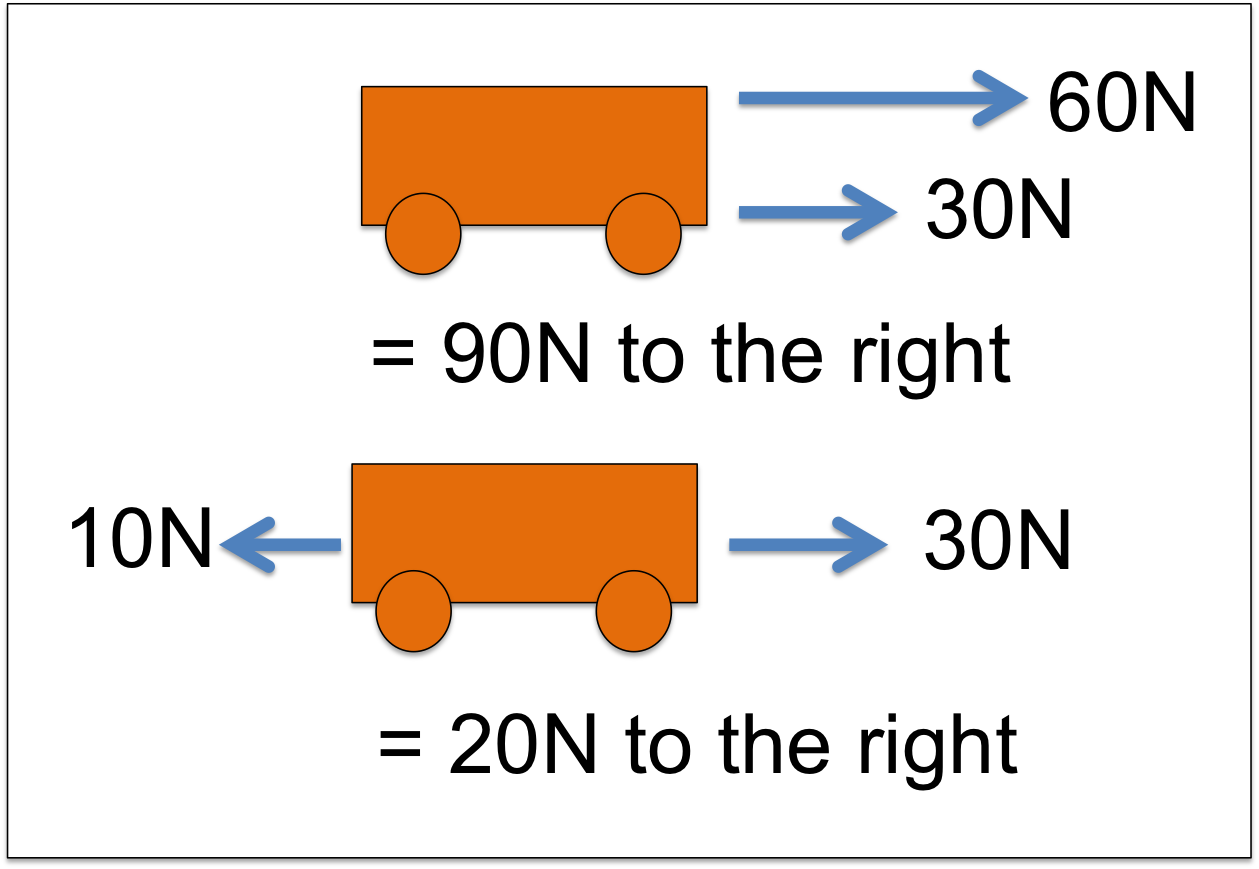
Net force, often denoted by the symbol $sum vec{F}$ or $vec{F}_{net}$, is the vector sum of all forces acting on an object. Forces are vectors, meaning they possess both magnitude (strength) and direction. Therefore, to determine the net force, we must consider not only the magnitude of each force but also its orientation relative to the object and other forces.
Imagine an airplane in flight. Several forces are continuously acting upon it:
- Thrust: The forward force generated by the engines.
- Drag: The resistive force of the air opposing motion.
- Lift: The upward force generated by the wings, counteracting gravity.
- Weight: The downward force of gravity acting on the aircraft’s mass.
If all these forces were equal and opposite in their respective directions, the net force would be zero, and the aircraft would maintain a constant velocity (or remain at rest if initially stationary). However, in reality, these forces are rarely perfectly balanced, and it is the imbalance – the net force – that causes changes in the aircraft’s motion. Newton’s Second Law of Motion, $vec{F}_{net} = mvec{a}$, quantifies this relationship, stating that the net force acting on an object is directly proportional to its mass ($m$) and the acceleration ($vec{a}$) it experiences. Acceleration, in turn, represents a change in velocity, meaning a change in speed or direction.
Components of Net Force in Aviation
In the context of flight technology, forces can be broadly categorized into those acting along the principal axes of motion. For an aircraft, these are typically the longitudinal (fore-aft), lateral (side-to-side), and vertical (up-down) axes.
Longitudinal Forces and Pitch Control
The primary longitudinal forces are thrust and drag.
- Thrust: Generated by propellers or jet engines, thrust propels the aircraft forward. The magnitude of thrust is controlled by the pilot or the flight control system, directly influencing the aircraft’s speed.
- Drag: This force arises from air resistance and acts opposite to the direction of motion. It is influenced by the aircraft’s shape, speed, and the density of the air.
The interplay between thrust and drag determines the aircraft’s acceleration in the forward direction. For instance, if thrust exceeds drag, the aircraft accelerates forward. Conversely, if drag is greater than thrust, the aircraft will decelerate. This balance is crucial for maintaining cruise speed, accelerating for takeoff, or decelerating for landing.
While thrust and drag primarily affect forward motion, they also indirectly influence pitch. The positioning of the engines and the aerodynamic design of the fuselage and wings contribute to the overall pitching moment. However, the primary control over pitch – the rotation around the lateral axis – is achieved through the elevator, which modifies the airflow over the tail surfaces. Changes in elevator deflection alter the lift (or downward force) generated by the tail, creating a torque that pitches the nose of the aircraft up or down.
Lateral Forces and Yaw/Roll Control
Lateral forces are less about direct forward/backward movement and more about side-to-side motion and rotation.
- Side Force: This force acts perpendicular to the longitudinal axis. It can be generated intentionally through the use of the rudder, which deflects airflow to push the tail sideways, causing the aircraft to yaw (rotate around the vertical axis). Unintentional side forces can also arise from asymmetric thrust or crosswinds.
- Roll: Rotation around the longitudinal axis is controlled by the ailerons, typically located on the trailing edges of the wings. By deflecting one aileron up and the other down, the lift on the wings is altered asymmetrically, creating a rolling moment.
The net force along the lateral axis, combined with moments, dictates the aircraft’s ability to maneuver. For a drone, for instance, the differential thrust of its propellers directly generates the forces and moments needed for yaw, roll, and pitch. Understanding how these forces sum up is key to precise control.
Vertical Forces and Altitude Control
The most significant vertical forces are lift and weight.
- Lift: This upward force is primarily generated by the wings. It is a complex aerodynamic phenomenon resulting from the shape of the airfoils and the speed of the airflow over them. The angle of attack (the angle between the wing’s chord line and the oncoming air) also plays a critical role.
- Weight: This is the force of gravity pulling the aircraft towards the Earth. It depends on the aircraft’s mass and the local gravitational acceleration.
For an aircraft to fly, lift must counteract or exceed weight. During level flight, lift is equal to weight, and the net vertical force is zero. When the pilot (or autopilot) needs to climb, lift is increased (e.g., by increasing speed, angle of attack, or flap extension), causing the net vertical force to be upward, resulting in an upward acceleration. Conversely, a descent is initiated when lift is less than weight, creating a downward net force.
The elevator is also a primary control surface for vertical forces, as mentioned in the longitudinal section. Its action on the tailplane generates a force that contributes to the overall vertical force and the pitching moment, thereby influencing altitude.
Net Force in Stabilization Systems
Modern flight technology relies heavily on sophisticated stabilization systems that constantly monitor and adjust forces to maintain a desired flight path and attitude. These systems, whether in a commercial aircraft’s autopilot or a drone’s flight controller, are fundamentally designed to manage net force.
Inertial Measurement Units (IMUs) and Accelerometers
At the core of most stabilization systems are Inertial Measurement Units (IMUs). IMUs typically contain accelerometers and gyroscopes. Accelerometers measure linear acceleration along each of the three axes. According to Newton’s Second Law, this measured acceleration is a direct consequence of the net force acting on the sensor within the IMU. By integrating these acceleration readings over time, the system can infer changes in velocity and position.
However, accelerometers also detect the constant acceleration due to gravity. In a stable, hovering drone, the accelerometers would register the downward pull of gravity. The stabilization system must therefore distinguish between accelerations caused by applied forces (like engine thrust or control surface deflection) and the constant force of gravity. This is where the gyroscopes come in, measuring angular velocity and helping to determine the orientation of the aircraft.
Control Algorithms and Force Vectoring
Flight control algorithms use data from IMUs, GPS, barometers, and other sensors to calculate the current state of the aircraft (position, velocity, attitude). Based on the desired trajectory and attitude, these algorithms then determine the necessary control inputs. For a multirotor drone, this means precisely adjusting the speed of each individual motor.
For example, if a drone is subjected to a gust of wind that pushes it sideways, the IMU detects the resulting acceleration. The flight controller interprets this as a deviation from the desired position. To counteract the gust, the controller will command the motors to generate additional thrust in the opposite direction of the wind, effectively creating a new net force that cancels out the disturbing force of the wind and restores the drone to its intended position.
Similarly, in maintaining a stable hover, the flight controller is continuously working to ensure the net force acting on the drone is zero. If the drone begins to drift downwards due to a slight imbalance between lift and weight, the controller will increase motor speed to generate more lift until the net vertical force is again zero. This constant, subtle adjustment of forces is what provides the illusion of effortless stability.
The Role of Net Force in Navigation and Maneuvering
Accurate navigation and agile maneuvering are critical for many applications of flight technology, from aerial photography to search and rescue missions. The ability to precisely control the net force acting on an aircraft is the key to achieving these capabilities.
GPS and Position Holding
Global Positioning System (GPS) receivers provide an aircraft with its absolute position in space. This information is fed into the flight control system. If the aircraft deviates from its programmed GPS waypoint, the flight controller calculates the necessary forces to correct the course. This might involve creating a net force that vectors the aircraft back towards the intended path. For instance, a drone programmed to fly a survey pattern will use GPS data to ensure its net force components keep it precisely on track.
Obstacle Avoidance Systems
Advanced flight technology incorporates obstacle avoidance systems that utilize sensors like lidar, radar, or optical cameras. When an obstacle is detected, the flight controller must generate a net force to steer the aircraft clear of it. This often involves a rapid application of lateral or vertical forces to initiate an evasive maneuver. The effectiveness of these systems depends on their ability to quickly calculate the required force vector and actuate the control surfaces or motor speeds to achieve it.
Aerobatic Flight and Unconventional Maneuvers
Even in simpler aircraft, understanding net force is essential for performing maneuvers. For an aerobatic pilot, the goal is often to generate significant net forces to induce rapid changes in altitude, speed, and attitude. For a high-performance racing drone, agility is paramount, requiring precise and rapid control over the net force to execute tight turns and navigate complex courses. The ability to rapidly change the direction and magnitude of the net force is directly related to the aircraft’s acceleration capabilities.

Conclusion: The Unifying Principle
In conclusion, net force is not merely an abstract physics concept; it is the fundamental driver of all motion and change in velocity within flight technology. From the basic lift and drag forces that enable flight to the complex interplay of forces managed by sophisticated stabilization and navigation systems, understanding and controlling net force is paramount. Whether designing advanced autopilot systems, developing agile racing drones, or engineering new forms of aerial mobility, a deep appreciation for the vector sum of forces acting on an aircraft is the bedrock upon which innovation is built. The ability to precisely manipulate this resultant force allows us to achieve greater stability, navigate with unparalleled accuracy, and unlock new possibilities for aerial exploration and application.