Computer network architecture, in the context of advanced drone technology, refers to the fundamental design and organization of the communication systems that enable drones to operate effectively and efficiently. It encompasses the blueprint for how individual components, subsystems, and external entities interact and exchange data. For drones, this isn’t just about connecting a controller to a flight module; it’s a sophisticated interplay of hardware, software, protocols, and security measures that facilitate everything from basic control and telemetry to complex autonomous missions and data processing. Understanding this architecture is paramount for unlocking the full potential of modern unmanned aerial vehicles (UAVs), particularly in demanding applications like aerial filmmaking, mapping, and remote sensing.
Core Components of Drone Network Architecture
The network architecture of a drone system is a multi-layered construct, integrating various technologies to ensure seamless operation. At its heart are the onboard components that form the drone’s internal network, alongside external communication links that bridge the gap between the drone and its ground control station or other networked elements.
Onboard Network Infrastructure
The drone itself houses a complex network of interconnected components. This internal architecture is critical for the real-time processing of sensor data, flight control commands, and communication with external systems.
Flight Controller and Sensor Integration
The flight controller serves as the central nervous system of the drone, processing data from an array of sensors. These sensors, including accelerometers, gyroscopes, magnetometers, barometers, and GPS receivers, form an intricate web of data points that must be rapidly collected, processed, and acted upon. The network architecture here ensures low-latency communication between the flight controller and each sensor, often utilizing high-speed serial interfaces like UART, SPI, or I2C. The ability of the flight controller to efficiently manage and prioritize this constant influx of data is a testament to the underlying network design. Modern flight controllers might also integrate optical flow sensors, lidar, and vision-based systems, further complicating the onboard network by requiring efficient data pipelines for high-bandwidth visual or range data.
Communication Modules and Data Buses
Various communication modules are integrated into the drone to handle different types of data transmission. This includes Wi-Fi for short-range communication, Bluetooth for proximity control or accessory pairing, and often dedicated radio frequency (RF) transceivers for long-range command and control (C2) and telemetry. These modules are typically connected to the flight controller via robust data buses, ensuring reliable data transfer. The architecture must account for the bandwidth requirements of each module, ensuring that critical flight data is not impeded by less time-sensitive transmissions. For example, FPV (First-Person View) systems, which transmit real-time video streams, require significantly higher bandwidth than standard telemetry data. The network design must accommodate these differing needs, potentially through dedicated pathways or prioritized traffic management.
Payload Integration
Drones are increasingly equipped with sophisticated payloads, such as high-resolution cameras, thermal imagers, or specialized sensor packages. The network architecture must provide a standardized and efficient interface for these payloads, allowing them to communicate with the flight controller and transmit their data. This can involve USB connections, Ethernet interfaces, or custom data protocols. For instance, a gimbal camera system needs to receive commands for stabilization and framing while simultaneously transmitting high-definition video feeds. The onboard network architecture dictates how this data is routed and processed, impacting the quality and responsiveness of the payload’s operation.
External Communication Links
The external communication links are what truly enable a drone to operate beyond its immediate physical proximity, connecting it to ground operators, cloud services, or other drones. This is where the concept of a distributed network becomes evident.
Command and Control (C2) Links
The C2 link is arguably the most critical external communication channel, responsible for transmitting pilot commands to the drone and receiving essential telemetry data back. This link must be robust, secure, and possess low latency to ensure reliable control. Architectures vary, from simple direct radio links for recreational drones to encrypted, spread-spectrum, or frequency-hopping systems for professional applications. The selection of frequency bands (e.g., 2.4 GHz, 5.8 GHz, or proprietary bands) and modulation schemes significantly impacts range, interference resilience, and data throughput. The network architecture must also account for redundancy, with potential for multiple C2 channels or fallback communication methods.
Telemetry and Data Transmission
Beyond basic C2, drones generate and transmit vast amounts of telemetry data. This includes GPS coordinates, altitude, battery status, flight modes, sensor readings, and diagnostic information. High-bandwidth data transmission is also crucial for applications like live video streaming from FPV cameras or transmitting large datasets from mapping or inspection missions. The network architecture dictates the protocols used for this transmission (e.g., MAVLink, UDP, TCP/IP over cellular or satellite links) and the bandwidth allocated. This can involve dedicated data links, piggybacking data onto C2 channels, or leveraging onboard Wi-Fi or cellular modems for high-throughput applications.
Ground Control Station (GCS) Interaction
The GCS is the interface through which human operators interact with the drone. Its network architecture is designed to receive, process, and display telemetry data, send commands, and manage mission planning. The GCS itself can be a standalone unit, a software application on a tablet or laptop, or a complex integrated system. The communication protocols and data formats between the drone and the GCS are central to the network architecture. For advanced operations, the GCS might also communicate with cloud-based services for mission planning, data storage, and real-time analytics, further extending the network’s reach.
Network Protocols and Standards
The effectiveness of drone network architecture relies heavily on the protocols and standards employed to govern data exchange. These ensure interoperability, efficiency, and reliability across diverse hardware and software platforms.
Communication Protocols
A variety of communication protocols are employed in drone networks, each suited for specific purposes.
MAVLink
MAVLink (Micro Air Vehicle Link) is a lightweight messaging protocol designed for communicating between autopilots and ground stations, as well as between autopilots and other onboard components. It is widely adopted in the drone community, particularly by open-source flight stacks like ArduPilot and PX4. MAVLink’s architecture allows for the definition of various message types, enabling the transmission of telemetry, commands, parameter tuning information, and more. Its efficiency, low overhead, and extensibility make it a cornerstone of many drone communication systems.
UDP and TCP/IP
For higher bandwidth applications or when integrating with broader IP-based networks, protocols like UDP (User Datagram Protocol) and TCP/IP (Transmission Control Protocol/Internet Protocol) are utilized. UDP is often favored for real-time data streams like video, where speed is prioritized over absolute reliability. TCP/IP, with its guaranteed delivery and error checking, is used for more critical data transfers or when reliable connection-oriented communication is required, such as during firmware updates or complex mission data synchronization.
Proprietary Protocols
Many manufacturers also develop proprietary protocols for their specific drone systems. These might be optimized for their hardware and software, offering unique features or performance benefits. However, they can also lead to vendor lock-in and limit interoperability with third-party accessories or software. The underlying network architecture must be flexible enough to accommodate these proprietary solutions while also supporting open standards.
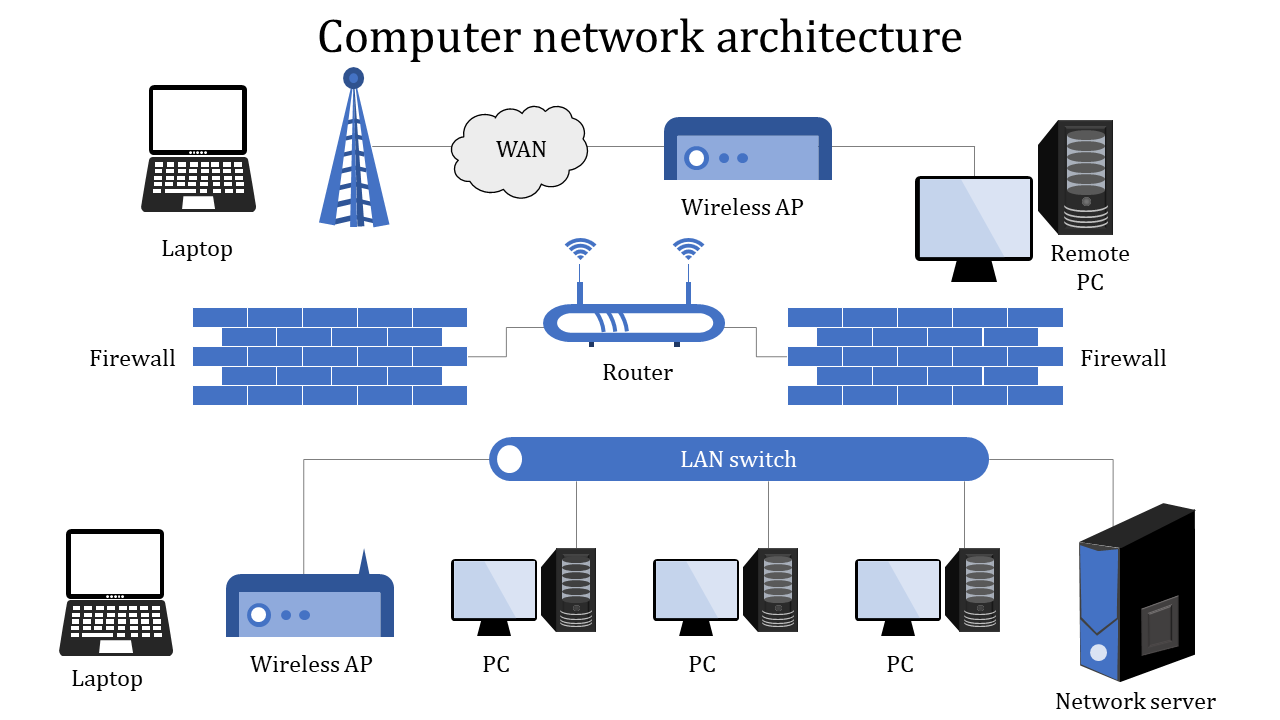
Network Topologies
The way components are interconnected defines the network topology. For drones, these are typically centralized or hierarchical.
Star Topology
In a star topology, the flight controller acts as the central hub, with all other onboard components (sensors, communication modules, payloads) connecting directly to it. This is a common architecture for many drone systems, simplifying management and ensuring that the flight controller has direct control over all elements.
Hierarchical Topology
For more complex systems, a hierarchical topology might be employed. This could involve a primary flight controller managing subsystems that, in turn, manage their own local networks. For instance, a sophisticated mapping payload might have its own internal network for sensor data acquisition and processing, which then communicates at a higher level with the main flight controller.
Advanced Network Concepts in Drone Operations
As drones become more sophisticated, their network architectures are evolving to support advanced functionalities such as swarm operations, enhanced autonomy, and integration with broader intelligent systems.
Drone Swarming and Multi-Drone Communication
The concept of drone swarming involves multiple drones coordinating their actions to achieve a common objective. This necessitates a robust network architecture that allows for inter-drone communication. This can be achieved through direct peer-to-peer links (mesh networking), or via a central command node. Protocols like LoRa or dedicated RF links can be used for this inter-drone communication, enabling drones to share sensor data, positional information, and coordinated task assignments. The network architecture must manage the complexity of routing data efficiently between numerous dynamic nodes, ensuring that communication remains stable even as drones move and their relative positions change.
Edge Computing and Onboard Processing
Modern drones are increasingly equipped with powerful onboard processors capable of performing complex computations, such as real-time object detection, AI-driven decision-making, and sophisticated sensor fusion. This “edge computing” capability is enabled by the drone’s internal network architecture, which must efficiently handle the high-bandwidth data streams from cameras and other sensors to the processing units. The architecture also dictates how processed data is then relayed to the flight controller for action or transmitted externally for further analysis. This reduces reliance on constant ground station connectivity and enables more autonomous and responsive operations.
Integration with Cloud and IoT Platforms
The network architecture of advanced drones extends beyond the immediate drone-to-ground link to encompass integration with cloud platforms and the Internet of Things (IoT). This allows for sophisticated data analysis, long-term storage, fleet management, and integration with other networked systems. Drones can upload sensor data, inspection reports, or mapping products to the cloud for processing by AI algorithms or for sharing with stakeholders. Conversely, cloud platforms can send updated mission plans, geofencing parameters, or operational instructions to the drone. Cellular or satellite communication modules play a key role in bridging this gap, establishing the necessary IP connectivity. The network architecture must ensure secure and efficient data transfer to and from these external platforms.
Security and Reliability in Drone Network Architecture
Given the increasing reliance on drones for critical applications, the security and reliability of their network architecture are paramount.
Data Encryption and Authentication
To protect sensitive data and prevent unauthorized control, drone network architectures employ robust encryption and authentication mechanisms. C2 links are often encrypted to prevent eavesdropping and spoofing. Authentication protocols ensure that only authorized ground stations can communicate with a drone, and that the drone itself is communicating with a legitimate command source. This is particularly important for commercial and government applications where data integrity and privacy are critical.
Redundancy and Fault Tolerance
A well-designed network architecture incorporates redundancy and fault tolerance to ensure continued operation in the event of component failures or communication disruptions. This can include redundant communication links, backup flight control systems, and intelligent fail-safe mechanisms. For example, if the primary C2 link is lost, the drone might automatically switch to a backup RF channel or attempt to re-establish a connection via a cellular network. This layered approach to communication and control is essential for maintaining operational safety and mission success.
In conclusion, computer network architecture for drones is a multifaceted domain that underpins every aspect of their functionality. It’s a dynamic field, constantly evolving to support greater autonomy, enhanced data processing, and seamless integration into a broader technological landscape. From the intricate wiring within a drone to the global reach of cloud connectivity, the architecture is the invisible framework that empowers these remarkable machines to perform increasingly complex and vital tasks.