In the dynamic world of drone technology, where autonomous flight, sophisticated mapping, and intelligent decision-making are no longer futuristic concepts but present-day realities, understanding fundamental mathematical principles is paramount. Among these, the “gradient of a function” stands out as a cornerstone, silently powering many of the advanced capabilities that define modern unmanned aerial vehicles (UAVs). Far from being an abstract mathematical curiosity, the gradient is a critical tool for engineers and AI researchers developing the next generation of smart drones, enabling everything from precise navigation and robust stabilization to intelligent object recognition and efficient data processing.
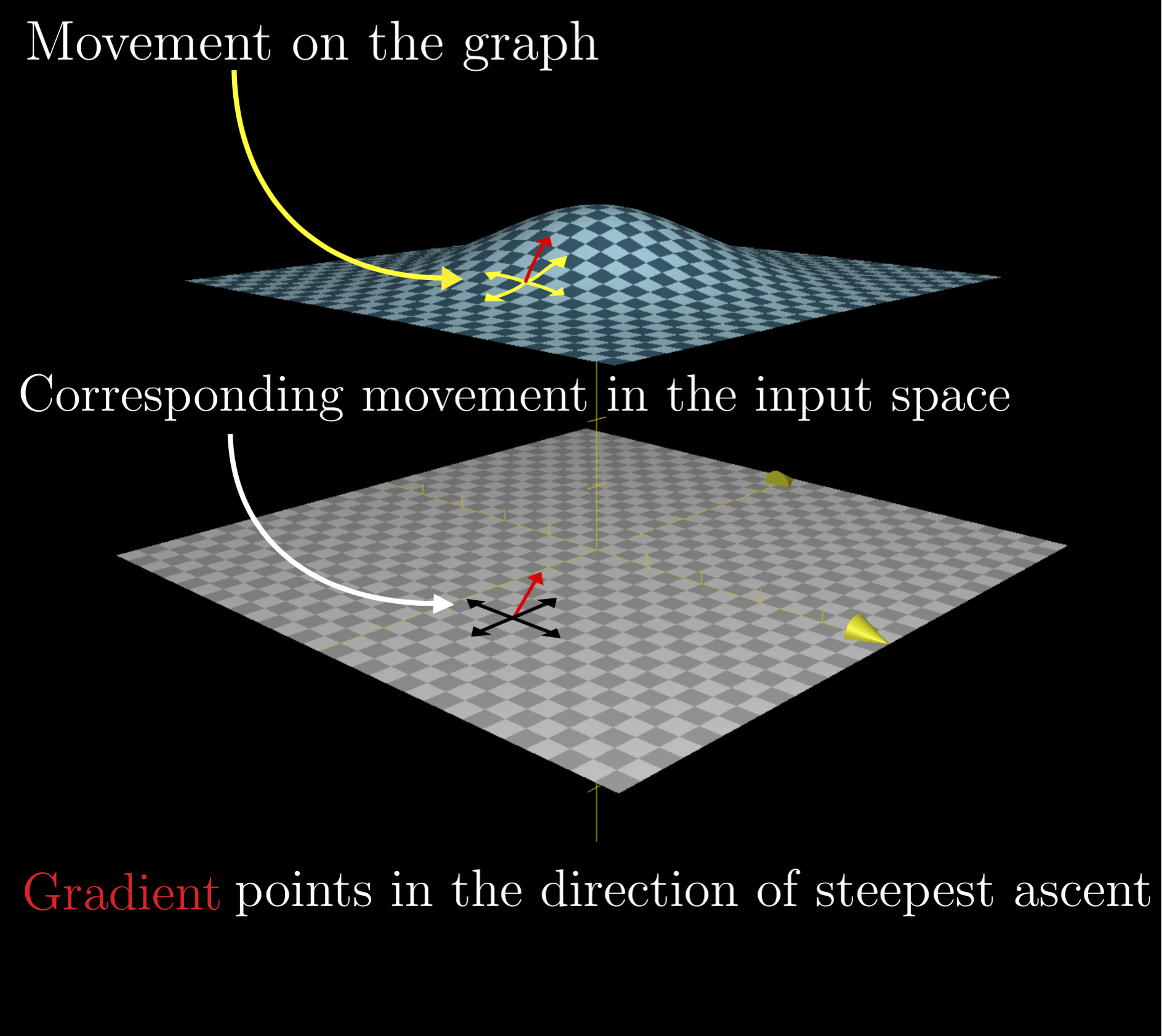
At its core, the gradient provides a powerful means to understand how a multi-variable function changes. Imagine a complex landscape representing a drone’s environment, where elevation could be defined by a function. The gradient tells you the direction of the steepest ascent and how steep that ascent is at any given point. This seemingly simple concept becomes extraordinarily powerful when applied to optimization problems, guiding autonomous systems to make optimal decisions in real-time, whether it’s finding the shortest path, avoiding an obstacle, or training an AI model to recognize intricate patterns. Without a firm grasp of the gradient, many of the sophisticated algorithms that underpin contemporary drone innovation would remain conceptually opaque and practically unachievable.
Unpacking the Fundamentals: The Gradient Defined
To truly appreciate the gradient’s impact on drone technology, we must first establish a clear understanding of what it is and how it functions mathematically. It’s a concept that transcends simple derivatives, extending their utility into multi-dimensional spaces—the very spaces in which drones operate.
Intuitive Understanding: Direction and Steepness
Imagine you are standing on a topographical map, perhaps of a mountainous region. The function in this scenario could represent the elevation at any given longitude and latitude. If you wanted to climb the mountain as quickly as possible from your current position, you wouldn’t just walk in any random direction; you’d choose the path that goes most directly upwards. The gradient, in this intuitive sense, is precisely that path. It points in the direction of the steepest increase of the function at a particular point. Furthermore, the magnitude (or length) of the gradient vector tells you how steep that ascent is.
Conversely, if you wanted to descend the mountain as quickly as possible, you would move in the opposite direction of the gradient. This inverse relationship is fundamental to optimization algorithms like gradient descent, which seek to find the minimum value of a function by iteratively moving in the direction opposite to its gradient. For a drone, this could translate to minimizing energy consumption, minimizing deviation from a flight path, or minimizing the error in a prediction.
Mathematical Formulation: A Vector of Partial Derivatives
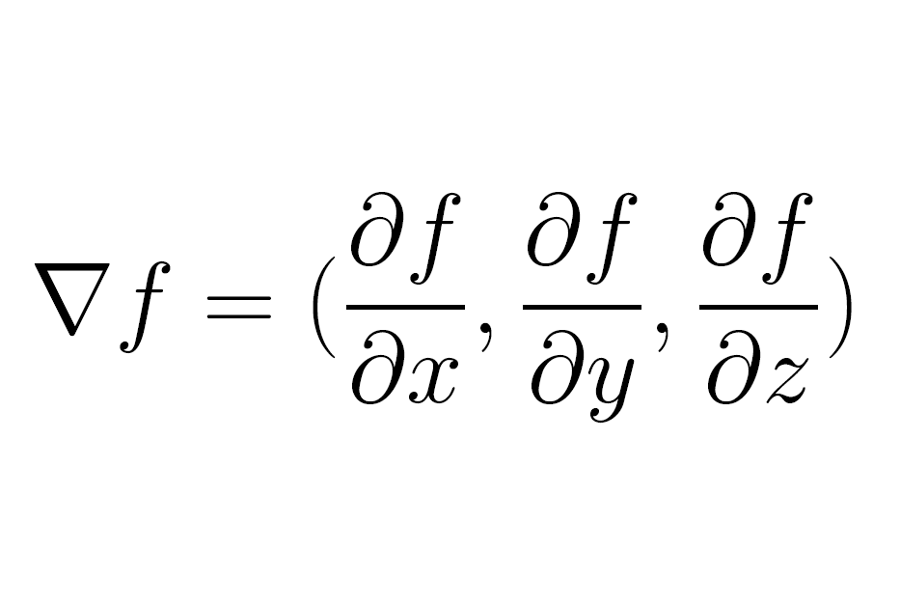
Mathematically, for a scalar-valued function $f(x1, x2, …, x_n)$ of multiple variables, the gradient is a vector whose components are the partial derivatives of the function with respect to each variable. It is typically denoted by the nabla symbol, $nabla f$.
For a function $f(x, y, z)$, the gradient would be:
$nabla f(x, y, z) = left( frac{partial f}{partial x}, frac{partial f}{partial y}, frac{partial f}{partial z} right)$
Each partial derivative $frac{partial f}{partial xi}$ measures the rate of change of the function $f$ with respect to a single variable $xi$, assuming all other variables are held constant. When these partial derivatives are assembled into a vector, they collectively describe the overall direction and rate of change of the function across all its input dimensions. In the context of drone tech, these variables could represent spatial coordinates (x, y, z), velocity components, sensor readings, or parameters of an AI model. Understanding this vector allows for precise manipulation and optimization of drone behavior in complex, multi-dimensional operational spaces.
The Gradient’s Role in Drone Navigation and Path Planning
Autonomous drone flight hinges on the ability to navigate complex environments, often in real-time. The gradient provides a powerful mathematical framework for solving these intricate navigation and path planning problems.
Guiding Autonomous Flight: Gradient Descent for Optimal Paths
One of the most direct applications of the gradient is in path planning for autonomous drones, particularly through the use of gradient descent and its variants. Imagine a drone needs to travel from point A to point B while optimizing for certain criteria, such as minimizing flight time, energy consumption, or maximizing coverage in a search pattern. These criteria can be formulated as an “objective function” or “cost function.” The goal then becomes to find the set of flight path parameters (e.g., waypoints, velocities, accelerations) that minimize this cost function.
Gradient descent is an iterative optimization algorithm that uses the gradient to find the local minimum of a function. The drone’s control system can continuously calculate the gradient of its cost function with respect to its current state variables (position, velocity, etc.) and then adjust these variables by moving in the opposite direction of the gradient. This process is repeated, allowing the drone to iteratively converge towards an optimal path. For instance, if the cost function penalizes deviations from a desired trajectory, the gradient will point towards increasing deviation, and moving against it will guide the drone back to its intended course with minimal effort. This is crucial for precise, efficient, and robust autonomous navigation in dynamic environments.
Obstacle Avoidance: Navigating Complex Environments
Beyond mere pathfinding, robust obstacle avoidance is critical for drone safety and mission success. The gradient plays a vital role here by helping drones understand their spatial relationship with obstacles and navigate safely around them. In potential field methods, a “repulsive” potential function is created around obstacles, meaning the value of the function increases as the drone gets closer to an obstacle. Conversely, an “attractive” potential function might guide the drone towards a target.
The drone’s navigation algorithm can then calculate the gradient of the combined potential field at its current location. The gradient vector in this scenario points in the direction of the steepest increase in “danger” or potential energy from an obstacle. By moving in the opposite direction of this gradient, the drone is effectively moving away from the closest obstacle while simultaneously being guided towards its target, ensuring smooth and collision-free trajectories. This real-time calculation and reaction, driven by gradient information, allows drones to dynamically adapt to unforeseen obstacles and navigate complex, cluttered airspace with remarkable agility.

Powering Intelligent Drones: AI, Machine Learning, and Control Systems
The intelligence embedded in modern drones, from their ability to follow subjects autonomously to their sophisticated control algorithms, is heavily reliant on principles derived from the gradient.
Training AI Models: The Backbone of Autonomous Features
Perhaps the most pervasive application of the gradient in modern technology, including drones, is within the realm of artificial intelligence and machine learning. Deep learning models, which power features like AI follow mode, object recognition, and autonomous decision-making, are essentially complex functions with millions or even billions of parameters. Training these models involves adjusting these parameters so that the model can accurately perform a specific task (e.g., identifying a person, distinguishing between a car and a tree).
This adjustment process is an optimization problem where the goal is to minimize a “loss function” – a mathematical representation of how poorly the model is performing. Gradient descent (and its advanced variants like stochastic gradient descent, Adam, RMSprop) is the engine that drives this optimization. During training, the gradient of the loss function with respect to each model parameter is calculated. This gradient tells us how much and in which direction each parameter needs to be adjusted to reduce the loss. By iteratively updating parameters in the direction opposite to the gradient, the AI model “learns” from data, becoming more accurate and capable. This gradient-based learning is fundamental to virtually every intelligent drone feature, transforming raw sensor data into actionable insights and sophisticated behaviors.
Enhancing Stabilization and Control: Beyond PID
While traditional Proportional-Integral-Derivative (PID) controllers are widely used for drone stabilization, more advanced and adaptive control systems often leverage gradient information. For complex, non-linear drone dynamics, or in situations requiring optimal control under varying conditions (e.g., payload changes, wind gusts), control laws derived using calculus of variations or optimal control theory frequently involve gradient-based optimization.
These systems might define a cost function related to control effort, tracking error, or energy consumption. The gradient of this cost function, with respect to the control inputs or state variables, can then be used to derive optimal control policies. Adaptive controllers, for instance, might use gradients to continually tune their parameters in response to changing environmental conditions or drone characteristics, ensuring stability and performance far beyond what fixed-gain controllers can offer. This leads to drones that can maintain stable flight in more challenging conditions and execute maneuvers with greater precision and efficiency.
Advanced Applications in Drone Mapping and Remote Sensing
Drone-based mapping and remote sensing generate vast amounts of data, from high-resolution imagery to 3D point clouds. Processing and interpreting this data for applications like precision agriculture, infrastructure inspection, or environmental monitoring critically depend on algorithms that employ the gradient.
Optimizing Data Processing: From Point Clouds to 3D Models
When drones capture data for 3D mapping (photogrammetry or LiDAR), millions of data points are collected. Constructing accurate 3D models from this raw data is a complex optimization problem. For example, in photogrammetry, the process of “bundle adjustment” simultaneously refines the 3D coordinates of points in the scene and the camera parameters (position, orientation, focal length) that captured them. This involves minimizing a reprojection error function—the difference between observed image features and where they would appear based on the current 3D model and camera parameters.
The minimization of this reprojection error is achieved using gradient-based optimization algorithms like Levenberg-Marquardt, which rely heavily on calculating the gradient (specifically, the Jacobian, which is a matrix of partial derivatives) of the error function. These gradients guide the iterative adjustments of 3D point coordinates and camera parameters, converging towards a highly accurate and consistent 3D reconstruction. Without these gradient-driven methods, the precision and detail of drone-generated 3D maps would be significantly compromised.
Feature Extraction and Anomaly Detection
In remote sensing, drones collect imagery across various spectral bands to analyze phenomena such as crop health, deforestation, or urban development. Extracting meaningful features from these images often involves image processing techniques that implicitly or explicitly use gradients. Edge detection algorithms, for instance, identify sharp changes in image intensity (which can be thought of as a strong gradient) to delineate objects or boundaries.
More advanced anomaly detection in remote sensing data, such as identifying diseased crops in a field or structural damage on a bridge, can also leverage gradient-based machine learning models. These models learn patterns from healthy or normal data and then use the gradient of their loss function to identify deviations that signify anomalies. By providing a mathematical measure of change and direction, the gradient enables drones to not only capture data but also to intelligently process and interpret it, leading to more actionable insights for a wide range of industries.
The Future of Drone Autonomy: Gradient-Driven Innovation
As drone technology continues to evolve, pushing the boundaries of autonomy and intelligence, the role of the gradient will only become more pronounced. From fundamental research to cutting-edge applications, the ability to understand and manipulate multi-variable functions through their gradients remains a core driver of innovation.
Real-time Adaptive Control
Future drones will operate in increasingly dynamic and unpredictable environments, requiring control systems that can adapt in real-time. Gradient-based optimization techniques will be central to developing adaptive controllers that can learn and adjust their parameters on the fly, compensating for changing payloads, aerodynamic conditions, or system degradations. This will enable drones to maintain peak performance and safety even in the face of unexpected challenges, moving towards true self-optimization in complex flight regimes.
Reinforcement Learning and Complex Decision-Making
Reinforcement Learning (RL), a powerful paradigm for training agents to make sequential decisions in an environment, is another area where gradients are indispensable. Algorithms like Policy Gradient methods or Actor-Critic methods use gradients to update the drone’s policy (its strategy for choosing actions) based on the rewards it receives from interacting with its environment. This allows drones to learn highly complex behaviors, such as navigating through intricate obstacle courses, performing collaborative tasks with other drones, or making intelligent decisions in unknown territories without explicit programming. The gradient provides the mathematical compass for these learning agents, guiding them towards optimal decision-making strategies that push the boundaries of drone autonomy.
In conclusion, “what is the gradient of a function” is far more than an academic question for drone engineers and researchers; it is a foundational concept underpinning virtually every aspect of advanced drone technology. From orchestrating intricate flight paths and ensuring collision-free navigation to empowering AI models with the ability to see and understand, and transforming raw sensor data into intelligent 3D models, the gradient is the silent, mathematical force driving the revolution in drone autonomy and innovation. Its continued exploration and application will undoubtedly pave the way for even more sophisticated and capable UAVs in the years to come.