Understanding the fundamental concepts of physics is crucial for anyone delving into the complexities of flight technology, whether it’s the intricate navigation systems of a drone or the precise stabilization of a large aircraft. Among these foundational ideas, the concept of a “frame of reference” stands out as particularly significant. Without a clear understanding of what a frame of reference is, discussions about motion, velocity, acceleration, and forces become ambiguous and often contradictory. This article will demystify the frame of reference, exploring its definition, different types, and its indispensable role in the realm of flight technology.

Defining the Frame of Reference
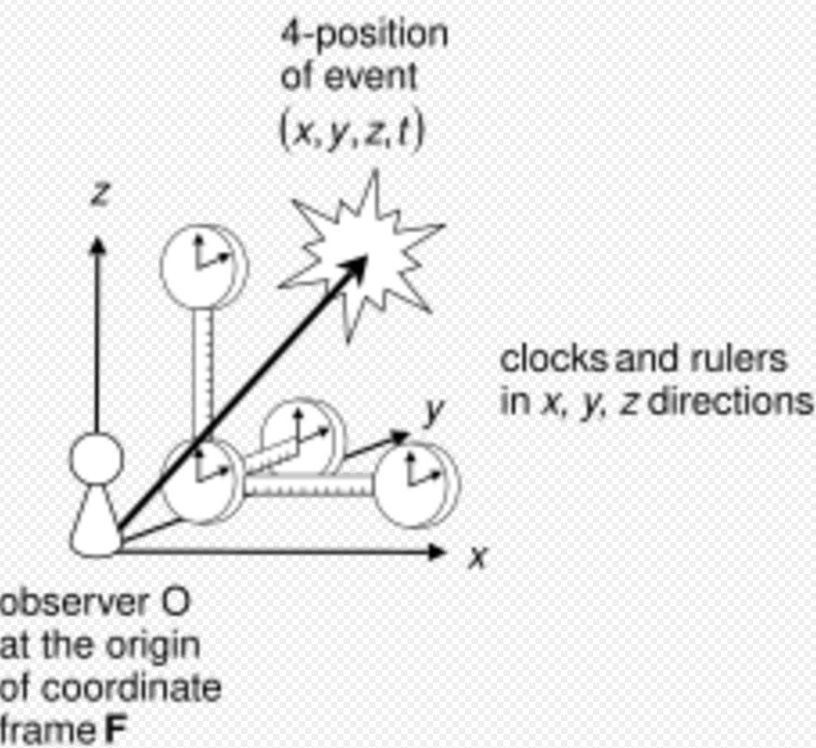
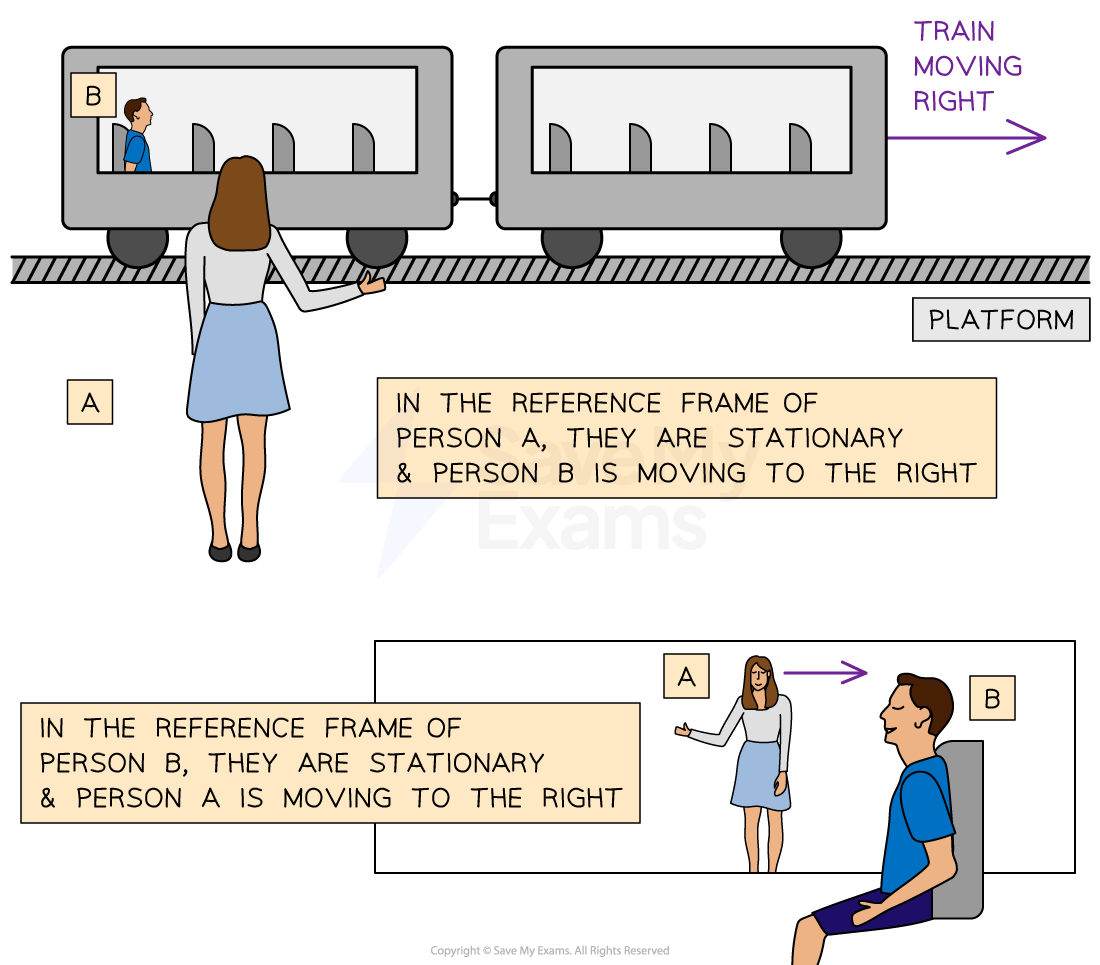
At its core, a frame of reference is a set of coordinates or a system used to describe the position and motion of an object. It’s essentially a viewpoint or a perspective from which observations are made. Imagine trying to describe the speed of a car. If you’re standing on the sidewalk, you’ll observe a certain speed. However, if you’re inside another car traveling alongside it, your observation of the first car’s speed will be different. This difference arises because you are using different frames of reference.
In physics, a frame of reference is usually defined by an origin point and a set of axes (typically Cartesian: x, y, and z) that allow us to assign numerical values to the location of an object in space. For instance, to describe the position of a drone, we might establish an origin on the ground directly below it and use axes that extend north, east, and up. The drone’s position could then be represented by a set of three coordinates (e.g., 10 meters north, 5 meters east, 20 meters up).
Inertial vs. Non-Inertial Frames of Reference
The distinction between inertial and non-inertial frames of reference is critical.
Inertial Frames of Reference
An inertial frame of reference is one in which an object at rest stays at rest, and an object in motion continues in motion with the same speed and in the same direction unless acted upon by an external force. This is the essence of Newton’s First Law of Motion, also known as the law of inertia. In an inertial frame, Newton’s laws of motion hold true in their simplest form.
Think of an observer in a spaceship that is not accelerating, accelerating, or rotating. If this observer drops a ball, it will fall straight down relative to their frame. If the spaceship is moving at a constant velocity, the ball will still appear to fall straight down relative to the observer inside the spaceship. The key is that the frame itself is not experiencing any net acceleration.
Non-Inertial Frames of Reference
A non-inertial frame of reference is one that is accelerating relative to an inertial frame. This acceleration means that objects within a non-inertial frame may appear to experience forces that are not caused by any physical interaction with another object. These apparent forces are often referred to as “fictitious forces” or “inertial forces.” Examples include the centrifugal force experienced when turning a corner or the Coriolis force that affects objects moving over long distances on Earth.
An observer in a car that is braking sharply will feel pushed forward. This is not due to an external force pushing them forward; rather, it’s their inertia – their tendency to continue moving forward at the original speed – resisting the deceleration of the car. From the car’s accelerating frame, it feels like a force is acting on them.
The Importance of Choosing a Frame of Reference
The choice of a frame of reference is not arbitrary; it directly impacts how we describe and analyze physical phenomena. What might appear as complex motion in one frame could be significantly simplified in another. For example, describing the trajectory of a projectile fired from a moving airplane is much easier if we consider the frame of reference of the airplane, where the projectile initially has zero velocity relative to the plane.
Frames of Reference in Flight Technology
The principles of frames of reference are absolutely fundamental to flight technology, impacting everything from basic aircraft design to advanced autonomous navigation systems.
Describing Aircraft Motion
When we talk about an aircraft’s motion, we are implicitly referring to a frame of reference.
Earth-Fixed Frame
The most common frame of reference for describing an aircraft’s overall journey is the Earth-fixed frame. This frame is essentially the surface of the Earth, treated as stationary (for many practical purposes, though technically the Earth is rotating and orbiting). In this frame, we describe the aircraft’s position using geographic coordinates like latitude and longitude, and its altitude. Its velocity is measured relative to the ground.
- Position: Latitude, Longitude, Altitude.
- Velocity: Ground Speed (speed and direction relative to the Earth’s surface).
Aircraft Body Frame
Another crucial frame is the aircraft body frame. This frame is fixed to the aircraft itself. Its origin is typically at the center of gravity, and its axes are aligned with the aircraft’s longitudinal (nose-to-tail), lateral (wingtip-to-wingtip), and vertical (fuselage bottom to top) axes. This frame is essential for understanding the aircraft’s orientation and the forces acting on its components.
- Orientation: Pitch, Roll, Yaw (angles relative to a horizontal plane and a reference direction).
- Internal Forces: Forces acting on wings, engines, and control surfaces.
Air Mass Frame
The air mass frame refers to the motion of the aircraft relative to the surrounding air. This is particularly important for aerodynamics. An aircraft’s lift and drag, for instance, are generated by its motion through the air.
- Airspeed: Speed and direction relative to the air.
- Angle of Attack: The angle between the chord line of a wing and the direction of the oncoming air.
The relationship between these frames is vital. For example, ground speed is the vector sum of the air mass frame velocity and the wind vector (which describes the air mass frame’s velocity relative to the Earth-fixed frame).
Navigation and GPS
Global Positioning System (GPS) relies heavily on understanding frames of reference. While GPS satellites transmit signals based on highly precise atomic clocks and orbital mechanics, the calculations to determine a receiver’s position involve translating these measurements into a terrestrial frame of reference.
Geodetic Frame
GPS receivers calculate their position in a geodetic frame, which is based on a mathematical model of the Earth’s shape, like the World Geodetic System 1984 (WGS84). This frame uses Cartesian coordinates (x, y, z) relative to the Earth’s center, which can then be converted into latitude, longitude, and altitude.
- Satellite Orbits: Described in an Earth-centered inertial (ECI) frame for precise orbital mechanics.
- Receiver Position: Calculated and presented in a WGS84 geodetic frame.
The transformation between different frames of reference is a complex but essential part of GPS accuracy. Understanding how a GPS receiver’s position in its local frame relates to the global geodetic frame is fundamental for accurate navigation.
Stabilization Systems and Sensors
Stabilization systems, whether in a camera gimbal on a drone or the flight control system of a large aircraft, constantly monitor and adjust the vehicle’s orientation. These systems rely on sensors that measure motion and orientation relative to specific frames of reference.
Inertial Measurement Units (IMUs)
IMUs are the workhorses of stabilization. They typically contain accelerometers and gyroscopes.
- Accelerometers: Measure linear acceleration. When mounted in an aircraft’s body frame, they can detect changes in velocity. However, they also measure the acceleration due to gravity, which complicates determining true acceleration unless accounted for.
- Gyroscopes: Measure angular velocity (rate of rotation). They are essential for detecting and counteracting unwanted rotations (pitch, roll, yaw) around the aircraft’s axes.
The data from an IMU is initially in the sensor’s body frame. For effective stabilization, this data must be processed and transformed into a stable, desired frame of reference, such as an inertial frame or a specific target orientation.
Sensor Fusion
To achieve robust and accurate stabilization, data from various sensors is “fused.” This involves combining information from an IMU with data from other sources like magnetometers (which sense the Earth’s magnetic field for heading) and barometric altimeters (which measure air pressure for altitude). Each sensor provides information relative to its own frame and with its own inherent uncertainties. Sophisticated algorithms, rooted in the principles of frames of reference and coordinate transformations, are used to integrate this data into a coherent state estimation of the aircraft’s position and orientation in a global frame.
Autonomous Flight and Path Planning
Autonomous flight systems, which enable drones and other UAVs to navigate and perform tasks without direct human control, are heavily dependent on precisely defined frames of reference.
Waypoint Navigation
When planning a flight path using waypoints, these coordinates are usually specified in a global frame (like latitude/longitude). The onboard flight control computer must then translate these global waypoints into commands that control the aircraft’s actuators, considering the aircraft’s current orientation in its body frame and its motion relative to the air and ground.
Obstacle Avoidance
Obstacle avoidance systems use sensors like LiDAR, sonar, or cameras to detect objects. The sensor data is initially in the sensor’s frame and then transformed into the aircraft’s frame, and potentially further into a world frame or a local occupancy grid, to determine the position and trajectory of obstacles relative to the aircraft. This allows the flight control system to calculate evasive maneuvers within the appropriate frame of reference to ensure safe passage.
Conclusion
The concept of a frame of reference, though seemingly abstract, is the bedrock upon which much of modern flight technology is built. From the fundamental description of an aircraft’s motion relative to the Earth or the air, to the complex calculations performed by GPS receivers and the sophisticated algorithms driving autonomous systems, understanding and manipulating different frames of reference is not just important – it is indispensable. Whether you are a drone pilot navigating a racecourse, an engineer designing a new stabilization system, or a researcher developing advanced AI for flight, a firm grasp of frames of reference will undoubtedly enhance your comprehension and capabilities.