In the fast-paced world of modern technology, understanding the nuances of our devices can significantly enhance our user experience. While not a feature directly related to drones, the concept of a “busy” status on an iPhone can offer parallels in how communication and operational readiness are managed within drone ecosystems. For pilots and drone operators, understanding when their “user busy” might be analogous to a drone’s operational status can be crucial for efficient workflow and safety. This article will explore the common interpretations of “user busy” on an iPhone and draw relevant comparisons to drone operation and management.
Understanding iPhone’s “User Busy” Status
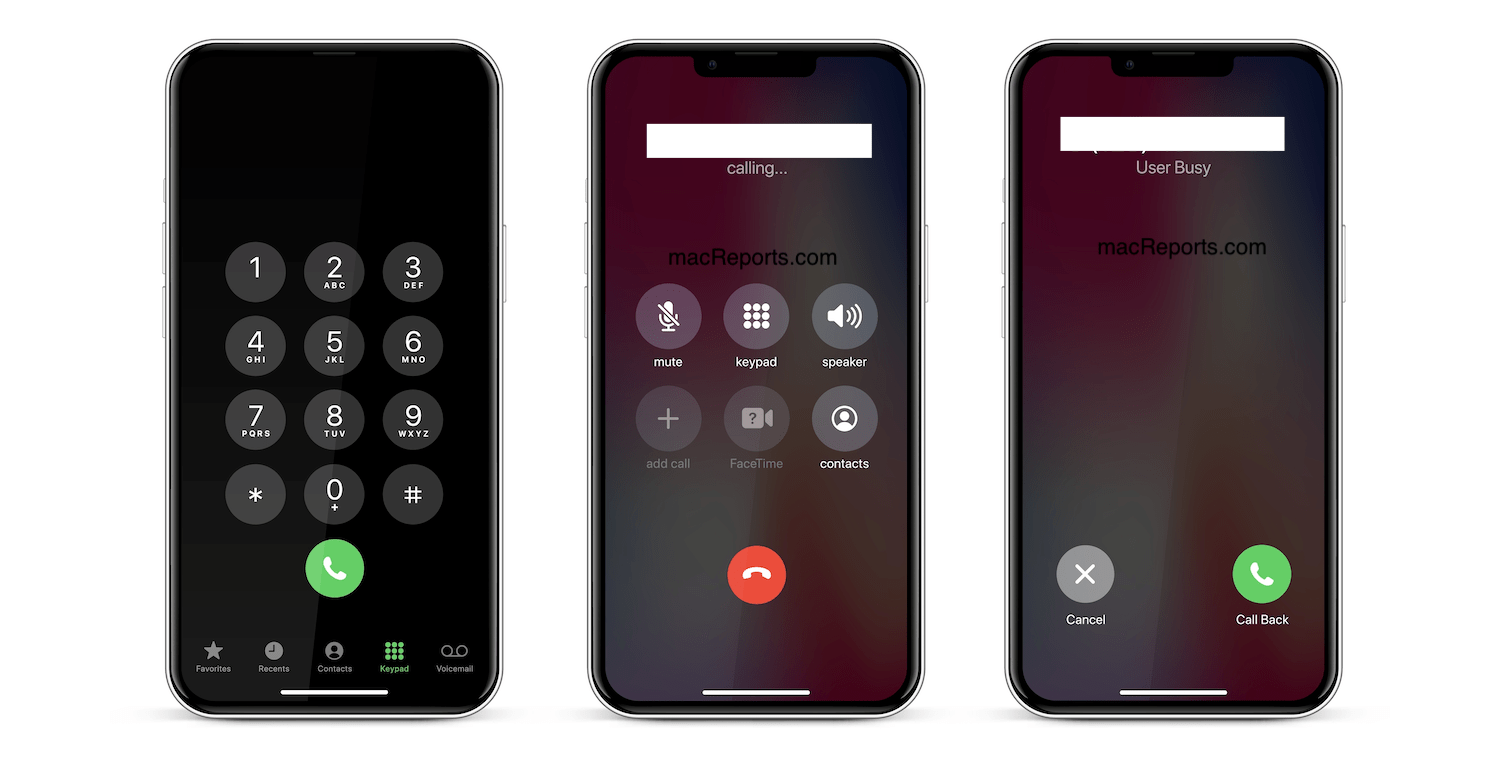
When your iPhone displays “user busy” or a similar notification, it typically signifies that the device is engaged in a task that prevents it from immediately responding to new requests or interruptions. This is not a system error but rather an indicator of the phone’s current workload. The underlying principle is that of resource allocation – a device can only process so many demands simultaneously.
Call and Communication Interference
One of the most common scenarios where “user busy” appears is during an active phone call. If you attempt to initiate a new call or receive one while already engaged, the system might flag it as busy. This prevents call dropping and ensures a clear line for the ongoing conversation. Similarly, attempting to use certain communication-dependent apps during a call might also trigger this status.
Background Processes and Resource Intensive Apps
Beyond active calls, background processes can also contribute to a “user busy” state. Modern smartphones are incredibly powerful, running numerous applications and services simultaneously. When an app is performing a computationally intensive task, such as rendering a video, downloading large files, or performing complex calculations, it can monopolize system resources. This leaves fewer resources available for other functions, leading to the “user busy” indicator. For instance, if your iPhone is actively backing up photos to the cloud or running a demanding game, you might notice a delay in responses from other applications.
System Updates and Maintenance
System updates are vital for security and functionality, but they often require significant processing power and system access. During an iOS update, your iPhone is essentially undergoing a complex operation that will temporarily render it unresponsive to many user inputs. This ensures the integrity of the update process and prevents data corruption. Likewise, scheduled maintenance tasks, though less frequent, can also place the device in a “busy” state.
Third-Party Application Behavior
Certain third-party applications, especially those designed for complex functionalities like video editing or 3D modeling, can push the iPhone’s hardware to its limits. If such an application is actively running or has background processes that are resource-heavy, it can indirectly cause the iPhone to appear “busy” to other functions. This highlights the importance of managing app permissions and understanding the resource demands of installed software.
Parallels in Drone Operations
The concept of a “user busy” status on an iPhone, while a consumer-level observation, carries significant weight when translated to the operational sphere of drones. In drone piloting, the pilot, the drone itself, and the associated ground control station (GCS) are all complex systems that can become “busy” with their respective tasks. Understanding these states is paramount for safe and efficient flight.
Pilot Workload and Situational Awareness
The drone pilot is the central “user” in the drone ecosystem. A pilot can become “busy” in several ways that directly impact their ability to control the drone. This can include managing complex flight paths, monitoring multiple data streams, responding to unexpected environmental changes (wind shifts, obstacles), communicating with air traffic control (if applicable), or troubleshooting technical issues. Just as an iPhone user might miss a notification when engrossed in a task, a busy pilot might miss critical warnings or environmental cues if their attention is solely focused on one aspect of the operation. Maintaining a manageable workload and clear situational awareness is akin to ensuring an iPhone isn’t overloaded with simultaneous demands.
Drone System Status and Processing Demands
The drone itself is a sophisticated piece of technology, and its onboard computers are constantly processing information. When a drone is engaged in demanding tasks, it can be considered “busy.” This includes:
Flight Control and Stabilization
Maintaining stable flight, especially in challenging conditions like high winds or during complex maneuvers, requires significant processing power for the flight controller and stabilization systems. The drone’s internal processors are continuously adjusting motor speeds to counteract external forces and maintain the desired attitude and position. If the flight controller is heavily taxed by stabilization, it might have reduced capacity to process other commands instantaneously, analogous to an iPhone processing a demanding app.
Navigation and Sensor Data Processing
Modern drones are equipped with numerous sensors – GPS, IMU, barometers, and sometimes optical flow or lidar. Processing the continuous stream of data from these sensors for navigation, obstacle avoidance, and precise positioning is a computationally intensive task. If the drone is actively mapping an area, performing autonomous navigation, or engaging its obstacle avoidance system, its processing units will be heavily utilized. This can lead to slight delays in responding to manual pilot inputs, especially if those inputs contradict the ongoing autonomous mission.
Payload Operation and Imaging Systems
When the drone’s payload is active, particularly its camera and gimbal system, it adds to the drone’s processing load. Recording high-resolution video (e.g., 4K), capturing multiple still images, or performing complex gimbal movements can require substantial resources. For FPV (First Person View) drones, the real-time transmission of video feeds to the pilot’s goggles also consumes processing power and bandwidth. If the drone is simultaneously performing a complex flight maneuver, recording high-quality video, and transmitting an FPV feed, its internal systems might be operating at peak capacity.
Ground Control Station (GCS) Workload
The Ground Control Station (GCS), whether it’s a dedicated tablet, a laptop, or a specialized controller with an integrated screen, is the pilot’s interface with the drone. The GCS software itself can become “busy.”
Mission Planning and Execution Software
Drone mission planning software, used to pre-program flight paths and waypoints, requires significant processing to calculate trajectories, altitudes, and sensor coverage. Once the mission begins, the GCS is responsible for transmitting commands, receiving telemetry data, and displaying it to the pilot. If the GCS is struggling to process complex mission data, render detailed maps, or manage a large volume of telemetry, it can become sluggish or unresponsive.
Data Logging and Real-time Analysis
Many GCS applications log flight data for post-flight analysis. If the drone is flying for an extended period or transmitting a high volume of telemetry, the GCS might be dedicating resources to continuously writing this data to storage. Furthermore, some advanced GCS systems offer real-time data analysis, such as object detection or environmental monitoring. These analytical processes can be very demanding on the GCS’s processing power, potentially leading to a “busy” state.
Multiple Screen Displays and Information Overload
Similar to how an iPhone can become overwhelmed if too many apps are open, a GCS setup with multiple displays showing various data feeds (video, telemetry, maps, sensor readouts) can strain the GCS’s ability to present all information smoothly. If the GCS software is trying to render all these different elements concurrently and update them in real-time, it might appear “busy” or laggy.
Managing “Busy” States for Optimal Performance
In both iPhone and drone operations, recognizing and managing “busy” states is crucial for optimal performance and safety. The principles, while applied differently, share a common goal: ensuring the system can respond effectively when needed.
iPhone Management Strategies
For an iPhone, managing “busy” states often involves:
- Closing Unused Apps: Regularly clearing apps from the multitasking view frees up RAM and processing power.
- Limiting Background App Refresh: Configuring which apps can refresh their content in the background reduces unnecessary processing.
- Optimizing Storage: A full device can slow down significantly. Regular cleanup of photos, videos, and unused apps can help.
- Restarting the Device: A simple reboot can clear temporary glitches and free up system resources.
- Performing Software Updates: Keeping iOS and apps updated ensures efficient performance and bug fixes.

Drone Operation Management Strategies
In the drone world, managing “busy” states requires a proactive and systematic approach:
- Pilot Training and Workload Management: Experienced pilots learn to prioritize tasks, delegate if possible (e.g., having a dedicated observer), and maintain clear situational awareness. This is akin to a pilot learning to manage multiple tasks on their iPhone without becoming overwhelmed.
- Pre-Flight Planning and Mission Optimization: Thorough mission planning, including route optimization and setting appropriate sensor parameters, can reduce the computational load during flight.
- Understanding System Limitations: Pilots must be aware of the processing capabilities of their drone and GCS. Flying complex missions in adverse weather conditions or pushing a drone to its sensor limits requires careful consideration.
- Using Appropriate Hardware: For demanding operations, employing higher-spec GCS devices or drones with more powerful processors can mitigate “busy” states.
- Regular Software and Firmware Updates: Ensuring the drone, GCS, and associated apps are running the latest stable versions is critical for performance and stability.
- Emergency Procedures: Having well-rehearsed emergency procedures ensures that even if the system becomes temporarily “busy” or unresponsive, the pilot knows how to regain control or initiate a safe landing. For instance, if the GCS becomes “busy” and the pilot cannot see critical telemetry, they might rely on pre-programmed return-to-home functions or visual cues.
By drawing parallels between the common user experience of an iPhone encountering a “busy” state and the complex operational demands of drone flight, we gain a deeper appreciation for how systems manage their resources. While the iPhone’s “user busy” is a minor inconvenience, the equivalent states in drone operations are critical factors influencing safety, efficiency, and mission success. Understanding these parallels empowers both technology users and drone operators to manage their respective digital environments more effectively.