Gravitational potential energy (GPE) is a fundamental concept in physics, crucial for understanding the behavior of objects within a gravitational field. For those involved in flight technology, particularly in areas like drone navigation and stabilization systems, a clear grasp of GPE is essential. This energy represents the work done by a gravitational force on an object as it is moved from one point to another. It’s the stored energy an object possesses due to its position relative to a source of gravity, and understanding its dependencies is key to predicting and controlling the motion of aerial vehicles.
The Core Dependencies of Gravitational Potential Energy
At its most basic, gravitational potential energy is influenced by two primary factors: the mass of the object and its height within a gravitational field. These two elements interact to determine the amount of energy an object has stored due to its vertical position.
Mass of the Object
The first and most direct influencer of GPE is the mass of the object itself. The more massive an object, the greater its gravitational pull and the more potential energy it can store. This is intuitive; a heavier object requires more energy to lift to a certain height than a lighter one. In the context of flight technology, this means that the GPE of a drone is directly proportional to its own weight. A larger, heavier drone will have a greater GPE at a given altitude than a smaller, lighter drone.
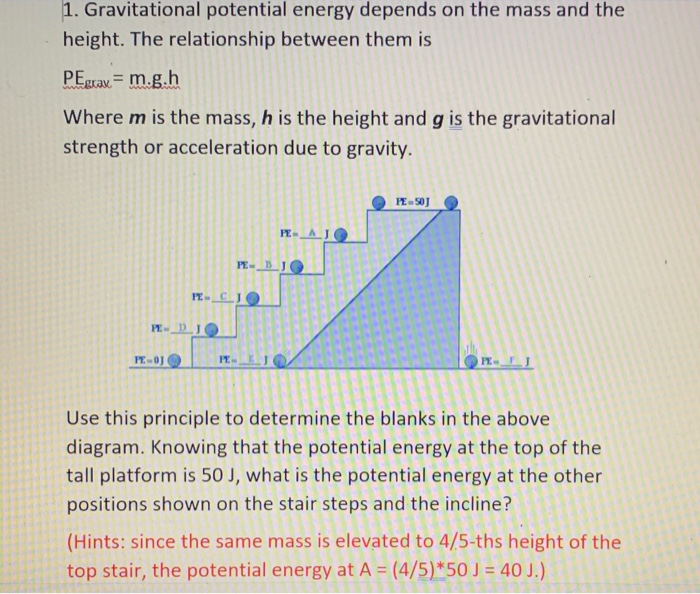
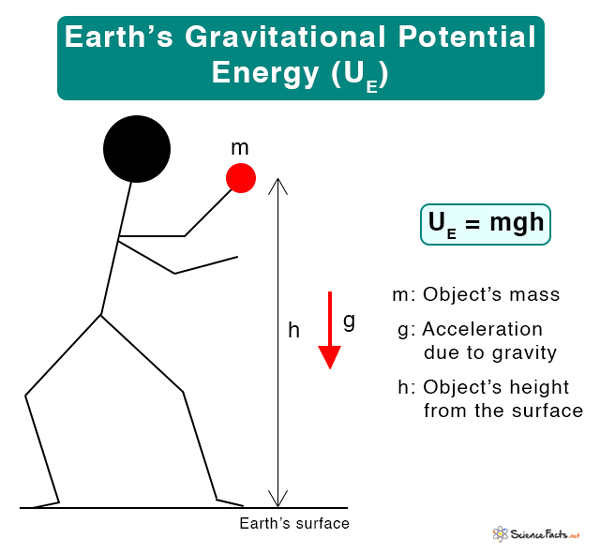
The mathematical representation of this relationship is often expressed as:
$PE = mgh$
Where:
- $PE$ is the potential energy
- $m$ is the mass of the object
- $g$ is the acceleration due to gravity
- $h$ is the height above a reference point
This formula clearly illustrates that if the mass ($m$) increases, while $g$ and $h$ remain constant, the potential energy ($PE$) will also increase. For drone operators and designers, this highlights the importance of considering the total mass of the payload, the drone itself, and any attached equipment when calculating energy reserves and flight dynamics.
Height Above a Reference Point
The second critical factor is the height ($h$) of the object above a defined reference point. This reference point is arbitrary but must be consistent for any given calculation. Commonly, the ground or sea level is chosen as the zero potential energy reference. The higher an object is lifted against the force of gravity, the more work is done on it, and thus the more gravitational potential energy it stores.
Consider a drone ascending. As it gains altitude, its GPE increases. This stored energy can then be converted into kinetic energy as the drone descends, or it can be used to perform work, such as powering onboard systems. For navigation systems, accurately determining the drone’s altitude is paramount for maintaining stable flight, executing maneuvers, and avoiding collisions. Barometric altimeters, GPS, and lidar sensors all contribute to this altitude measurement, which directly feeds into GPE calculations.
The Role of the Gravitational Field Strength ($g$)
While mass and height are the primary variables we typically manipulate or observe, the strength of the gravitational field ($g$) is also a fundamental determinant of GPE. For objects on Earth, $g$ is relatively constant, approximately $9.81 , text{m/s}^2$ at sea level. However, it’s important to recognize that $g$ varies slightly with altitude and latitude, and significantly in different celestial bodies.
For most terrestrial drone applications, assuming a constant $g$ is a reasonable simplification. However, for more advanced applications, such as long-range autonomous flights or operations in varying atmospheric conditions, understanding the subtle variations in $g$ might become relevant. Furthermore, when considering hypothetical scenarios or future technologies that might involve extraterrestrial operations, the variation in $g$ becomes a dominant factor in GPE calculations. The formula $PE = mgh$ implicitly includes the influence of the gravitational field through the term $g$. A stronger gravitational field would mean more potential energy stored for the same mass and height.
Nuances and Considerations in Flight Technology
While mass and height are the fundamental determinants, practical applications in flight technology introduce further considerations that indirectly relate to or are impacted by GPE.
Altitude Measurement Accuracy and its Impact
The accuracy of altitude measurement is directly tied to the reliable calculation of GPE. Inaccurate altitude readings from sensors like barometers (which can be affected by atmospheric pressure changes unrelated to altitude) or GPS (which has inherent positional error) will lead to incorrect GPE estimations.
Barometric Altimetry Limitations
Barometric altimeters work by measuring atmospheric pressure, which decreases with altitude. However, weather systems can cause significant pressure fluctuations, leading to altitude readings that drift even when the drone’s actual height remains constant. This drift can mislead stabilization systems that rely on altitude for maintaining a level flight profile or for specific maneuvering parameters. Compensating for these atmospheric variations is a key challenge in precise altimetry.
GPS and Altitude Estimation
While GPS is excellent for horizontal positioning, its vertical accuracy is generally poorer than its horizontal counterpart due to satellite geometry and atmospheric delays. This inherent inaccuracy in GPS-derived altitude means that GPE calculations based solely on GPS might not be sufficiently precise for critical flight phases or complex maneuvers.
Sensor Fusion for Enhanced Accuracy
To overcome these limitations, modern flight technology employs sensor fusion. By combining data from multiple sensors – such as barometers, GPS, accelerometers, and even lidar or radar for direct distance measurement – flight controllers can develop a more robust and accurate estimation of the drone’s altitude. This enhanced altitude data directly translates to more accurate GPE calculations, which are vital for intelligent flight modes, energy management, and precise navigation.
Energy Conversion and GPE
Gravitational potential energy is not static; it is dynamic and can be converted into other forms of energy, most notably kinetic energy. This conversion is fundamental to how drones manage their energy and perform actions.
Descending Flight and Kinetic Energy
When a drone descends, its GPE decreases, and this energy is converted into kinetic energy (the energy of motion). This means a descending drone naturally accelerates, assuming no counteracting forces. Flight control systems must manage this conversion to prevent excessive speed and maintain control. For instance, when a drone needs to descend quickly, it leverages this GPE-to-kinetic energy conversion. Conversely, to hover, the drone must expend energy to counteract the constant conversion of GPE into kinetic energy as it would naturally fall.
Ascending Flight and Energy Expenditure
To ascend, a drone must do work against gravity, increasing its GPE. This requires the expenditure of energy from its power source (batteries). The higher the drone ascends, the more work is done, and the greater the GPE it accumulates. This energy expenditure is a primary factor in determining flight endurance. Flight planning software and algorithms often take into account the energy cost of reaching various altitudes, factoring in the GPE increase.
Payload and its Influence on GPE
The mass of the payload carried by a drone significantly impacts its overall mass and, consequently, its GPE at any given altitude. A drone equipped with a heavy camera gimbal, a sophisticated sensor package, or a significant cargo load will have a higher GPE than the same drone when operating with a lighter configuration.
Flight Endurance and Payload
This increased GPE means that more energy is required to lift the drone and its payload to a certain height. Consequently, heavier payloads directly reduce flight endurance, not only because of the increased power required for lift but also due to the higher GPE that needs to be managed. Drone operators and engineers must carefully balance payload requirements with battery capacity and flight time objectives, keeping the impact of GPE on energy consumption in mind.
Stability and Center of Mass
The distribution of mass, including the payload, also affects the drone’s center of mass. A shifting or heavy payload can alter the drone’s stability and require more aggressive adjustments from the stabilization system. While not a direct dependency of GPE, the management of GPE in conjunction with payload considerations is crucial for safe and effective flight operations.
Advanced Concepts and Future Implications
As flight technology advances, so does our understanding and application of GPE principles. Autonomous systems, for instance, are increasingly relying on sophisticated GPE calculations for efficient pathfinding and energy management.
Autonomous Flight and Energy Optimization
Autonomous drones are programmed to perform complex missions without continuous human input. For these systems, optimizing energy consumption is critical for mission success. By accurately modeling the drone’s GPE at various points in its flight path, autonomous systems can plan routes that minimize altitude changes where possible or strategically utilize descents to conserve energy. This involves intricate calculations of work required for ascent and potential energy recovery during descents.
Path Planning and GPE Considerations
Advanced path planning algorithms consider not just the shortest distance or avoidance of obstacles but also the energy cost associated with vertical movement. A path that involves less climbing or more controlled descents can be chosen if it leads to greater overall energy efficiency, directly influenced by how GPE is managed along the trajectory.
Remote Sensing and Altitude Control
In applications like remote sensing, precision altitude control is paramount. The accuracy of GPE calculations, based on precise altitude and mass, is vital for ensuring that sensor data is collected at consistent and appropriate heights. For example, when performing aerial surveys or mapping, maintaining a specific altitude ensures consistent ground sampling distance for cameras and other sensors. Inaccurate altitude control, leading to incorrect GPE estimations and flight control responses, could compromise the quality and reliability of the collected data.
The Theoretical Landscape: Gravity Gradients and Higher Orders
While the formula $PE = mgh$ is a highly effective approximation for most terrestrial applications, a deeper theoretical understanding acknowledges that the gravitational field is not uniform. The strength of gravity ($g$) does decrease with altitude. For extremely high-altitude flights or operations in significantly different gravitational environments, more complex equations would be necessary that account for the inverse square law of gravity.
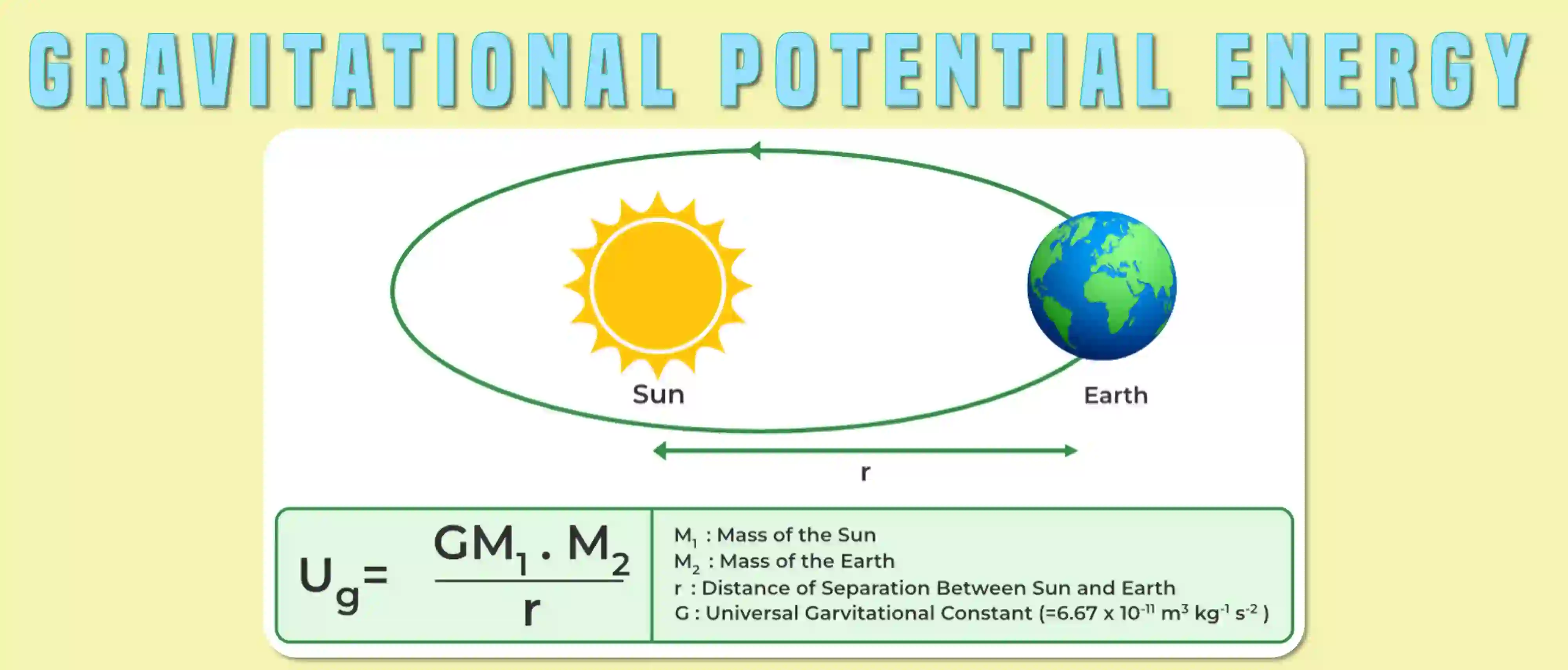
The gravitational force between two masses ($M$ and $m$) separated by a distance ($r$) is given by Newton’s law of universal gravitation:
$F = G frac{Mm}{r^2}$
Where $G$ is the gravitational constant. The potential energy of an object $m$ at a distance $r$ from the center of a much larger mass $M$ is given by:
$PE = -G frac{Mm}{r}$
In this formulation, the reference point for zero potential energy is at an infinite distance. For flight technology operating within Earth’s atmosphere, the simplification to $PE = mgh$ is valid because the variations in $r$ (distance from Earth’s center) are small compared to the Earth’s radius, and $g$ can be considered nearly constant. However, for understanding the fundamental physics and for potential future space-based or interplanetary drone applications, this more general form is important.
In conclusion, while the title “What Does Gravitational Potential Energy Depend On?” might seem like a basic physics query, its implications for flight technology are profound. The interplay of mass, height, and gravitational field strength directly influences how drones navigate, stabilize, manage energy, and perform their missions. As the sophistication of aerial vehicles and their applications continues to grow, a nuanced understanding of GPE remains a cornerstone of innovation and operational excellence.