In the rapidly evolving landscape of drone technology and innovation, the pursuit of optimal performance, efficiency, and utility is paramount. Engineers, developers, and operators are constantly striving to maximize capabilities while minimizing constraints, a complex balancing act that often brings into focus the principles of “Pareto efficiency.” Originating from economics, this concept provides a powerful framework for understanding and achieving optimal states in multi-faceted systems, making it surprisingly relevant to the design, deployment, and operation of advanced drone technologies, from AI-driven autonomous flight to sophisticated mapping and remote sensing applications. Understanding Pareto efficiency allows us to not only define what an “optimal” drone system looks like but also to navigate the inherent trade-offs in its development and use.
The Foundational Concept of Pareto Efficiency in Technological Systems
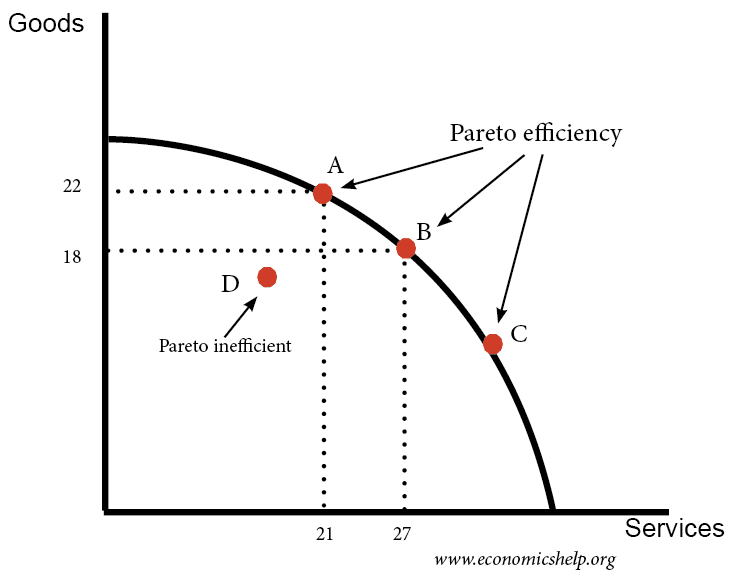
At its core, Pareto efficiency, or Pareto optimality, describes a state where resources are allocated in such a way that it is impossible to make any one party better off without making at least one other party worse off. In a technological context, “parties” can represent different performance metrics, system objectives, or resource constraints. For a drone system, these might include battery life, payload capacity, processing speed, data accuracy, operational range, cost, or mission duration. A system operating at a Pareto efficient point has achieved a balance where no single aspect can be improved without detriment to another critical aspect. This is distinct from simply making something “better”; it’s about reaching a point of irreducible trade-offs.
Defining Pareto Optimality in Drone Design and Operation
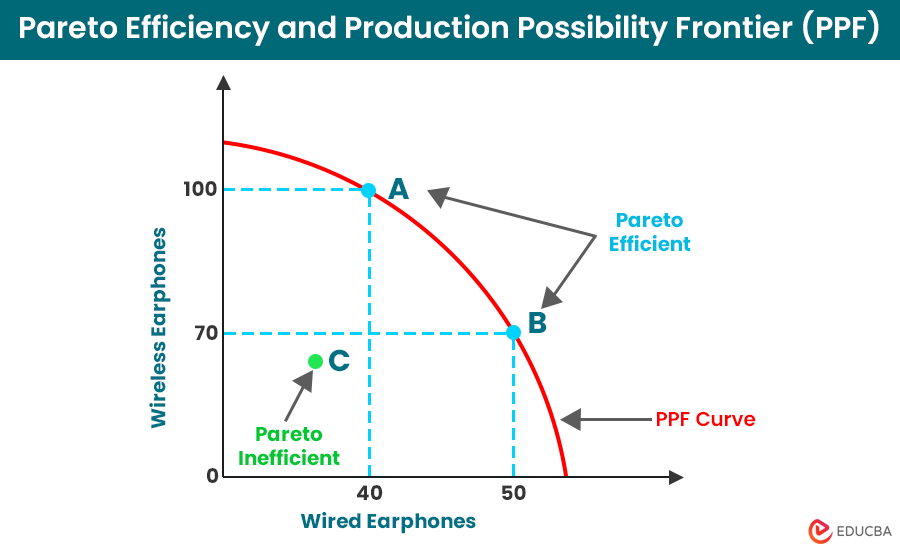
Consider a drone designed for mapping. Key performance indicators might include mapping resolution, flight time, and operational cost. If a drone system is Pareto efficient, it means you cannot increase the mapping resolution without either reducing the flight time (e.g., by adding heavier, more power-intensive sensors) or increasing the operational cost (e.g., requiring more frequent battery swaps or more expensive components). Similarly, you cannot extend flight time without potentially sacrificing resolution or increasing cost. The “Pareto front” or “Pareto frontier” in this context represents the set of all such optimal trade-offs – a curve or surface illustrating the best possible compromises between conflicting objectives. Any point within this frontier is suboptimal, meaning improvements can be made in at least one objective without negatively impacting others. Any point beyond the frontier is unattainable with current technology or resources.
Distinguishing from Absolute Optimization
It’s crucial to understand that Pareto efficiency does not imply a single, universally “best” solution. Instead, it identifies a set of optimal solutions, each representing a different balance of trade-offs. The “best” solution from this set depends entirely on the specific priorities and requirements of the mission or user. For instance, a military surveillance drone might prioritize stealth and range over resolution, while an agricultural drone might prioritize mapping accuracy and cost-effectiveness. Both, if well-designed, can reside on the Pareto front for their respective domains, reflecting different Pareto optimal points. This distinction is vital for innovation, as it acknowledges the diverse needs and applications within the drone industry and guides engineers in designing systems that are optimally tuned for specific purposes rather than attempting a one-size-fits-all solution.
Achieving Pareto Optimality in Autonomous Flight and AI
The advent of autonomous flight and artificial intelligence (AI) has brought the principles of Pareto efficiency to the forefront of drone technology. AI-driven systems are designed to make real-time decisions, optimize flight paths, manage energy consumption, and process data, all while balancing multiple, often competing, objectives. The goal is frequently to achieve a Pareto optimal outcome for the mission at hand, given the drone’s capabilities and environmental constraints.
AI-Driven Decision-Making and Resource Allocation
In autonomous flight, AI algorithms are constantly evaluating parameters such as remaining battery life, current wind conditions, sensor data quality, and mission objectives (e.g., cover a specific area, identify certain objects, maintain a safe distance from obstacles). A Pareto efficient AI would manage these variables to ensure that, for instance, extending the search pattern does not excessively compromise the ability to return to base, or increasing data resolution does not deplete battery reserves prematurely. This involves sophisticated predictive modeling and dynamic optimization. For example, an AI might determine that to achieve a required level of mapping completeness (objective 1), it needs to spend more time in the air (resource consumption 1), which will reduce the available battery for emergency maneuvers (safety objective 2). A Pareto optimal solution balances these such that no further improvement in mapping completeness can be made without reducing safety or vice versa.
Multi-Objective Path Planning and Navigation
Path planning for autonomous drones is a classic example of multi-objective optimization seeking Pareto efficiency. Objectives can include minimizing flight time, minimizing energy consumption, avoiding obstacles, maximizing sensor coverage, and adhering to airspace regulations. An optimal flight path isn’t just the shortest distance between two points; it’s the path that best balances these competing objectives according to predefined weights or priorities. Modern AI algorithms, such as those employing genetic algorithms or reinforcement learning, are specifically designed to explore the solution space and identify a set of Pareto optimal flight paths. The operator can then choose the path from this Pareto front that best suits the immediate mission context – perhaps prioritizing speed in one scenario and stealth or energy conservation in another. This dynamic adjustment based on a Pareto-informed understanding of trade-offs makes autonomous operations far more robust and adaptable.
Resource Management and Mission Planning for Optimal Outcomes
Beyond individual drone operations, the concept of Pareto efficiency extends to the broader strategies of resource management and mission planning for entire fleets or complex deployments. Here, the challenge lies in allocating limited resources (e.g., drones, ground stations, personnel, data processing power) across multiple tasks or over extended periods to achieve overall mission success with maximum efficiency.
Balancing Sensor Payload and Flight Endurance
One of the most persistent trade-offs in drone design and mission planning is the balance between sensor payload capabilities and flight endurance. High-resolution cameras, LiDAR systems, thermal sensors, and multi-spectral imagers are often heavy and power-intensive. Equipping a drone with a comprehensive suite of advanced sensors will significantly reduce its flight time due, directly, to increased weight and indirectly, to higher power draw. A Pareto efficient approach involves carefully selecting the minimum necessary sensor package to achieve the mission objectives while maximizing flight time. For a specific mission, if a standard optical camera provides sufficient data, then deploying a drone with an additional heavy thermal camera would be suboptimal from a Pareto perspective if the thermal data isn’t critical, as it would unnecessarily reduce flight duration. The “optimal” sensor configuration exists on the Pareto frontier where the incremental benefit of adding another sensor is precisely offset by the incremental cost in terms of reduced flight time or increased operational complexity.

Optimizing Data Collection and Processing Workflows
In remote sensing and mapping, Pareto efficiency also applies to the entire data workflow, from collection to processing and analysis. Objectives might include maximizing data accuracy, minimizing data acquisition time, minimizing post-processing time, and reducing computational costs. For instance, increasing the overlap between aerial photos (to improve 3D model accuracy) will increase the total number of photos, leading to longer flight times, larger data volumes, and increased processing demands. A Pareto optimal strategy would involve finding the sweet spot where sufficient overlap is achieved for the desired accuracy without incurring excessive flight or processing overhead. This might involve intelligent flight planning that adapts overlap based on terrain complexity or employing edge computing on the drone itself to pre-process data and reduce the volume transmitted, thereby making the entire workflow more efficient without sacrificing critical output quality.
Multi-Objective Optimization in Drone Development and Innovation
The principles of Pareto efficiency are not just theoretical constructs; they are practical tools that guide drone development, driving innovation by forcing engineers to confront and resolve inherent trade-offs. Every new component, every software update, and every system integration implicitly grapples with multi-objective optimization.
Engineering Trade-offs: Cost, Performance, and Reliability
Every engineering project, especially in cutting-edge fields like drone technology, operates within a triangular constraint of cost, performance, and reliability. You can generally achieve two of these at the expense of the third. Building a drone that is extremely high-performance and highly reliable will likely be very expensive. Making it cheap and high-performance might compromise reliability. Pareto efficiency helps identify the set of optimal compromises within this triangle. Innovators continually push the Pareto frontier outwards by developing new materials, more efficient power systems, or advanced manufacturing techniques that allow for better performance or reliability at a given cost, or lower cost for a given performance level. For example, advancements in battery chemistry that provide more energy density per unit weight effectively shift the entire Pareto front for flight endurance vs. payload capacity, allowing for previously unattainable combinations.
Balancing User Experience and System Complexity
Another critical area is the balance between user experience (UX) and system complexity. Advanced autonomous features, sophisticated controls, and extensive customization options can enhance user experience, but they often come with increased software complexity, higher computational demands, and a steeper learning curve. A Pareto efficient design would strive to offer a rich user experience without overwhelming the operator or introducing unnecessary points of failure. This might involve intuitive interfaces that abstract complex processes, modular software architectures, or AI assistants that simplify mission planning. The challenge is to find the point where added features genuinely enhance usability without making the system cumbersome or unreliable. Innovations like “AI Follow Mode” are good examples; they offer a powerful, user-friendly capability by abstracting extremely complex real-time navigation and object tracking algorithms into a simple, single-click function, effectively pushing the Pareto frontier for ease of use versus autonomous capability.
Future Implications and Challenges for Pareto Efficiency in Drones
As drone technology continues its rapid advancement, the application and implications of Pareto efficiency will only deepen. Future innovations will increasingly focus on not just improving individual metrics but on optimizing complex interdependencies to push the boundaries of what drones can achieve.
Pushing the Pareto Frontier Through Disruptive Technologies
Disruptive technologies like quantum computing, advanced metamaterials, or truly autonomous self-learning AI will fundamentally shift the Pareto frontiers in drone technology. Imagine batteries with ten times the energy density, or processors capable of instantaneous, multi-spectral data analysis on-board. Such breakthroughs would enable entirely new combinations of range, payload, autonomy, and cost that are currently considered impossible. The constant drive for innovation in areas like advanced propulsion (e.g., hydrogen fuel cells), miniaturized sensor technologies, and robust communication systems is precisely about finding ways to achieve previously incompatible objectives, thereby expanding the envelope of Pareto optimality for drone systems.
Addressing Societal and Ethical Trade-offs
Beyond technical specifications, the concept of Pareto efficiency also implicitly extends to the societal and ethical implications of drone deployment. As drones become more ubiquitous in surveillance, delivery, and autonomous operations, there will be trade-offs between public safety, privacy, economic benefit, and security. For instance, allowing autonomous drone deliveries could provide immense economic benefit and convenience (objective 1), but might also raise privacy concerns due to pervasive aerial observation (objective 2) or increase risks of accidents in urban environments (objective 3). Achieving a “societal Pareto optimum” involves finding policies and technological safeguards that maximize the benefits while minimizing the negative externalities, such that no one group’s well-being can be improved without negatively impacting another. This is an inherently complex challenge, requiring broad stakeholder engagement and ethical AI design to navigate these multifaceted trade-offs.
In conclusion, “What is Pareto Efficiency?” in the context of drone tech and innovation is more than an academic question; it’s a guiding principle. It shapes how engineers design systems, how AI optimizes performance, and how operators plan missions. By understanding and actively seeking Pareto optimal solutions, the drone industry can continue to push the boundaries of what’s possible, creating more capable, efficient, and ultimately beneficial aerial platforms for a diverse range of applications, while strategically managing the inevitable trade-offs that define true innovation.