In the rapidly advancing world of Unmanned Aerial Vehicles (UAVs), technical specifications often lean heavily on physics to describe performance, stability, and efficiency. Among the most critical terms used by aerospace engineers and flight technology specialists is the “Newton.” Named after Sir Isaac Newton, this unit of measurement serves as the bedrock for understanding how a drone overcomes gravity, maneuvers through the air, and maintains stability in turbulent conditions. For anyone involved in flight technology, understanding what a Newton means is not merely a theoretical exercise; it is essential for calculating thrust-to-weight ratios, determining payload capacities, and optimizing flight controller algorithms.
The Fundamental Physics of Force in Aerial Systems
At its most basic level, a Newton (N) is the International System of Units (SI) derived unit of force. It is defined as the amount of force required to accelerate a mass of one kilogram at a rate of one meter per second squared ($1text{kg} cdot text{m/s}^2$). In the context of drone flight technology, this unit allows engineers to quantify the various physical interactions a drone experiences while in the air.
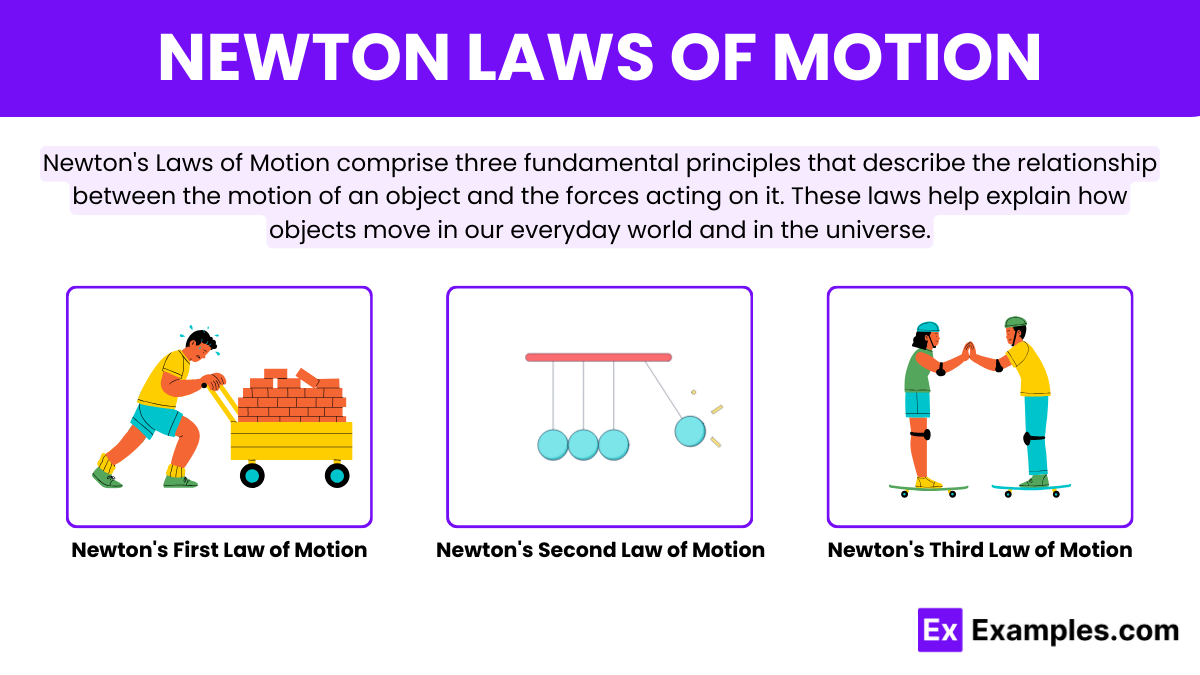
Newton’s Second Law: The Formula for Flight
The most direct application of this unit comes from Newton’s Second Law of Motion: $F = ma$ (Force equals mass times acceleration). For a drone to lift off the ground, its propulsion system must generate a vertical force—thrust—that exceeds the gravitational force acting upon the drone’s mass.
In flight technology, we often discuss mass in grams or kilograms, but the flight controller thinks in terms of Newtons. If a drone has a mass of 1 kilogram, gravity exerts a downward force of approximately 9.81 Newtons. Therefore, the motors and propellers must generate more than 9.81 N of upward thrust just to achieve a hover. Understanding this conversion is critical for sensor calibration and the development of autonomous flight paths, as the drone must constantly calculate the “Net Force” acting upon its frame.
Weight vs. Mass in Flight Dynamics
A common point of confusion in drone specifications is the difference between mass and weight. While mass is a constant measure of matter, weight is a force measured in Newtons. On Earth, weight is the product of mass and the acceleration due to gravity ($g approx 9.81 text{ m/s}^2$). When a flight stabilization system detects a “weight” change—perhaps due to a modular sensor attachment or an external payload—it is actually measuring a change in the Newtons of force required to maintain altitude. Flight technology relies on this distinction to ensure that the internal Inertial Measurement Unit (IMU) can accurately predict how much power to send to the Electronic Speed Controllers (ESCs).
Thrust Management and Propulsion Efficiency
The concept of the Newton is most visible when evaluating drone propulsion systems. When you look at the datasheet for a high-performance brushless motor, you will often see thrust ratings. While many consumer-grade spec sheets use “grams of thrust” for simplicity, professional flight technology documentation uses Newtons to describe the motor’s output.
The Power-to-Weight Ratio
One of the most vital metrics in drone engineering is the thrust-to-weight ratio. This ratio determines the agility and safety margin of the aircraft. For a stable professional drone used in mapping or sensing, a common target is a 2:1 ratio. This means the propulsion system can generate double the Newtons of force required to offset the drone’s weight.
For example, if a drone weighs 20 Newtons (roughly 2 kg), a 2:1 ratio requires a propulsion system capable of 40 Newtons of total thrust. This extra 20 N of force is what allows the drone to accelerate upward, fight against wind resistance, and recover from aggressive maneuvers. Without sufficient Newtons of thrust in reserve, the flight stabilization system cannot effectively counteract external disturbances, leading to “prop wash” or altitude drops during high-speed turns.
Static vs. Dynamic Thrust
Flight technology also distinguishes between static and dynamic thrust. Static thrust is the force measured in Newtons when the drone is stationary (e.g., during takeoff or hover). Dynamic thrust is the force generated when the drone is already moving through the air. As a drone moves faster, the “effective” Newtons of thrust produced by the propellers can change due to the velocity of the air entering the prop disk. Advanced flight controllers use complex algorithms to compensate for this loss of force, ensuring that the drone remains responsive even at the edge of its velocity envelope.
Newton’s Third Law and Stabilization Systems
Stability is the hallmark of modern drone technology, and it is governed almost entirely by Newton’s Third Law: For every action, there is an equal and opposite reaction. In a quadcopter, this is the reason why two propellers spin clockwise while the other two spin counter-clockwise.
Torque and Rotational Force
As the motors spin the propellers, they create a rotational force known as torque. According to the Third Law, the motor also exerts an equal torque in the opposite direction on the drone’s frame. This torque is measured in Newton-meters (Nm). By varying the speed of opposing motor pairs, the flight controller can manipulate these Newtons of torque to rotate the drone (yaw) without changing its altitude.
If the flight technology is not precisely calibrated to handle these Newtons of force, the drone would spin uncontrollably. Modern stabilization systems use high-frequency PID (Proportional-Integral-Derivative) loops to monitor these forces and make micro-adjustments hundreds of times per second.
The Role of the Inertial Measurement Unit (IMU)
The IMU is the “brain” that perceives these forces. It contains accelerometers that measure the Newtons of force acting on the drone across three axes. When a gust of wind hits the drone, the accelerometer detects a sudden change in force. The flight controller then calculates the exact number of Newtons required from each motor to counteract that wind and keep the drone stationary. This “counter-force” is what we perceive as “GPS lock” or “hover stability.” Without the ability to quantify force in Newtons, the drone could not differentiate between a gentle breeze and a mechanical failure.
Overcoming Aerodynamic Drag and Vectoring
In flight technology, moving through the air is just as complex as staying aloft. Every time a drone moves forward, it encounters aerodynamic drag—a force that opposes its motion. This resistance is also measured in Newtons.
The Drag Coefficient
As a drone’s velocity increases, the drag force increases exponentially (proportional to the square of the velocity). Flight engineers must design drone frames that minimize the Newtons of drag force. This is why many high-end drones have aerodynamic housings and tilted motor mounts. If the drag force (in Newtons) equals the maximum forward thrust force (in Newtons), the drone has reached its terminal velocity.
Vectoring and Directional Thrust
To move horizontally, a drone must tilt. This tilt “vectors” a portion of its vertical thrust in a horizontal direction. If a drone generates 50 Newtons of total thrust and tilts at a 45-degree angle, that force is split between maintaining altitude and generating forward momentum. Flight technology must manage this balance perfectly; if too much force is vectored horizontally, the drone will lose the Newtons required to fight gravity and will begin to sink. Advanced navigation systems automatically calculate these force vectors to ensure that flight paths are both fast and altitude-consistent.
Future Innovations in Force Efficiency and Sensing
As drone technology moves toward autonomous urban air mobility and long-range industrial sensing, the focus on Newtons of force efficiency has never been higher. Engineers are looking for ways to get more Newtons of thrust out of fewer Watts of power.
Solid-State Sensors and Force Feedback
The next generation of flight technology is incorporating more sophisticated force-sensing capabilities. This includes “force feedback” for remote pilots and autonomous systems that can “feel” the air density and turbulence. By understanding the precise Newtons of pressure on different parts of the airframe, drones can adjust their geometry—such as varying propeller pitch—to optimize performance in real-time.

Payload Integration and Structural Integrity
Finally, the measurement of Newtons is vital for the structural integrity of the drone itself. Every component, from the carbon fiber arms to the motor mounts, is rated to withstand a specific amount of force before failing. When a drone performs a high-G maneuver, the “load factor” increases the Newtons of force acting on the frame. Professional drone designers use finite element analysis to ensure that the airframe can handle three or four times the standard Newtons of force generated during a hover, ensuring reliability in extreme environments.
In conclusion, “Newton” is far more than a historical name in the context of drone flight technology. It is the language of movement and stability. From the moment of takeoff to the precision of a GPS-assisted hover, every aspect of a drone’s performance is a calculated dance of Newtons. Understanding this unit allows for a deeper appreciation of the complex physics that enable modern UAVs to defy gravity and navigate our world with such incredible precision.