At first glance, the curriculum of an 8th-grade math classroom—comprising the Pythagorean theorem, linear equations, and the properties of the coordinate plane—might seem worlds away from the cutting-edge world of Unmanned Aerial Vehicles (UAVs). However, for the engineers and software architects designing modern flight technology, 8th-grade math is the primary language of stabilization, navigation, and obstacle avoidance. When we ask “what is 8th grade math” in the context of flight technology, we are essentially asking how the fundamental building blocks of geometry and algebra are translated into the algorithms that keep a drone level in a high-wind environment or allow it to return to its home point with centimeter-level precision.

In flight technology, math is not a theoretical exercise; it is the functional framework that allows a flight controller to interpret raw data from a suite of sensors. From the Inertial Measurement Unit (IMU) to the Global Positioning System (GPS), the calculations performed thousands of times per second are rooted in the very concepts taught to thirteen and fourteen-year-olds.
The Geometry of Stabilization: How the Pythagorean Theorem Keeps Drones Level
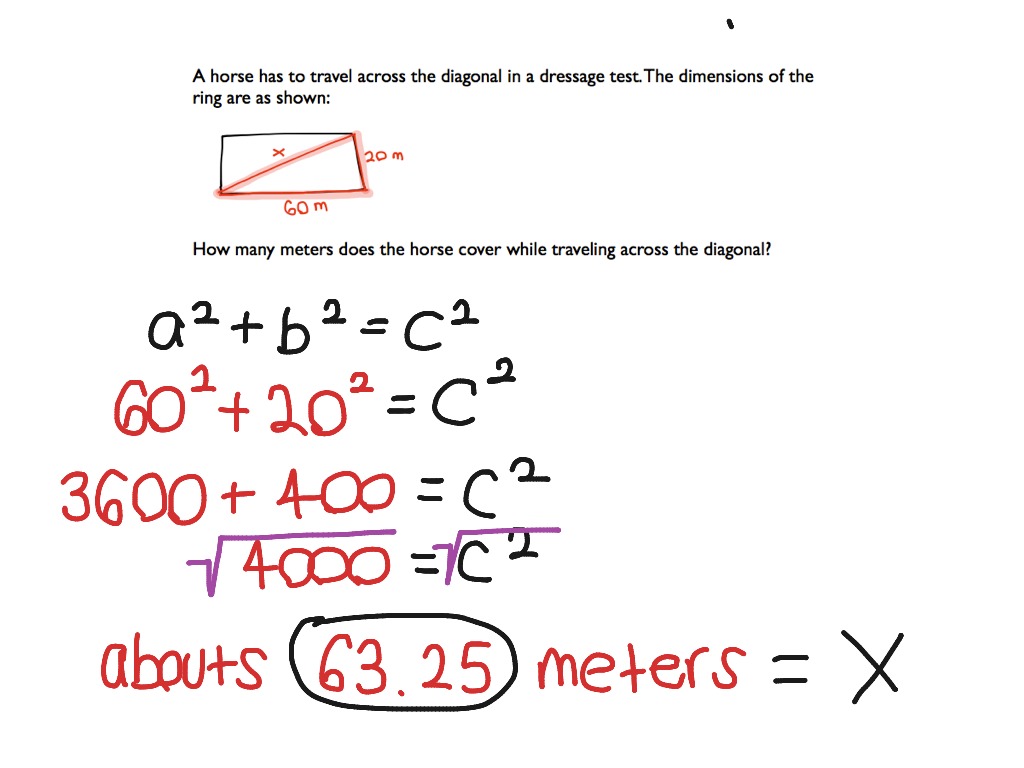
One of the cornerboards of 8th-grade math is the Pythagorean theorem ($a^2 + b^2 = c^2$). In the world of flight technology, this is not just a way to find the hypotenuse of a triangle on a worksheet; it is the fundamental calculation used by the IMU to determine the drone’s orientation in three-dimensional space.
Calculating Tilt and Lean with Triangulation
Every modern flight controller contains a 3-axis accelerometer and a 3-axis gyroscope. These sensors measure the forces acting on the drone along the X, Y, and Z axes. When a drone is hovering, gravity is the primary force acting upon it. If the drone tilts, the force of gravity is distributed differently across these three axes. Flight technology uses the principles of right-angle trigonometry—an 8th-grade staple—to calculate the exact angle of tilt. By treating the components of gravity along the axes as the sides of a triangle, the system can solve for the unknown angle, allowing the flight controller to make micro-adjustments to motor speeds to level the craft.
Sensor Fusion and the Geometry of Accuracy
The “math” of stabilization also involves filtering out “noise.” High-frequency vibrations from the propellers can confuse sensors. To solve this, flight technology employs sensor fusion, which uses geometric averages and weighted proportions to compare data from the gyroscope (which is good at measuring short-term movement) with the accelerometer (which is better for long-term stability). This constant geometric balancing act ensures that the “horizon” the drone perceives matches the actual physical horizon.
Linear Equations and Velocity: The Algebra Behind Flight Controllers
If geometry provides the drone’s “eyes” for balance, algebra provides the “brain” for movement. In 8th-grade math, students spend significant time learning about linear functions, the slope-intercept form ($y = mx + b$), and systems of equations. In flight technology, these algebraic structures are used to govern throttle control and horizontal velocity.
The PID Loop: Algebra in Motion
The heart of flight technology is the PID (Proportional-Integral-Derivative) controller. While the calculus behind it is advanced, the core logic is purely algebraic. The “Proportional” aspect is a simple linear relationship: the further the drone is from its target position (the “error”), the more power is applied to the motors to correct it.
If we look at the flight controller’s logic, it is constantly solving for variables. If x is the current wind speed and y is the desired hover position, the flight technology must solve for z (the motor RPM) to maintain equilibrium. This is a real-time application of solving linear equations where the goal is to keep the “error” variable as close to zero as possible.
Rate of Change and Predictive Flight
8th-grade math introduces the concept of “slope” as a rate of change. Flight technology utilizes this to predict where a drone will be in the next fraction of a second. By calculating the rate at which the drone is moving toward an object or a coordinate, the stabilization system can apply “braking” forces. Without this algebraic understanding of rates, a drone would constantly overshoot its target, leading to “oscillations”—the erratic wobbling often seen in poorly tuned flight systems.
The Three-Dimensional Coordinate Plane: Navigating with GPS and Waypoints
The 8th-grade curriculum places a heavy emphasis on the Cartesian coordinate plane. Students learn to plot points using $(x, y)$ coordinates and understand the relationship between distance and location. Flight technology takes this 2D concept and expands it into the 3D world of latitude, longitude, and altitude.
Mapping the World in X, Y, and Z
When a pilot sets a waypoint for an autonomous flight mission, they are essentially plotting points on a massive, globe-spanning coordinate plane. Flight navigation systems use GPS satellites to triangulate the drone’s position. This triangulation is an advanced application of the distance formula ($d = sqrt{(x2-x1)^2 + (y2-y1)^2}$), another 8th-grade fundamental. By calculating the distance from multiple satellites at known “points” in space, the flight technology determines its own $(x, y, z)$ coordinates.
Transformations and Rotations
In 8th grade, students learn about transformations: translations, rotations, and reflections. These are the exact mathematical operations a drone performs when it rotates its “heading.” If a drone is facing North and the pilot inputs a command to move “right,” the flight technology must perform a rotational transformation to translate that “right” command into the correct motor outputs based on its current orientation. If the math of the rotation is off by even a few degrees, the drone will drift off course, a phenomenon known in the industry as “toilet bowl effect” where the drone spirals out of control because its coordinate math doesn’t match its physical orientation.
Rates and Proportions: The Logic of Obstacle Avoidance and Sensor Fusion
The final pillar of 8th-grade math that defines flight technology is the study of ratios and proportions. Modern drones are equipped with obstacle avoidance systems—ranging from ultrasonic sensors to binocular vision sensors—that rely on the proportional relationship between time, speed, and distance.
Time-of-Flight (ToF) Sensors
Many stabilization systems use Time-of-Flight sensors to maintain a specific height above the ground or to avoid walls. These sensors emit a pulse (light or sound) and measure how long it takes to bounce back. The flight technology then uses the basic proportion of $Distance = Rate times Time$. Since the “rate” (the speed of light or sound) is a known constant, the “time” is measured, and the “distance” is solved for. This 8th-grade algebraic formula is what prevents a drone from crashing into a tree or allows it to maintain a steady altitude over uneven terrain.
Optical Flow and Proportional Scaling
Optical flow sensors are cameras on the bottom of a drone that “watch” the ground to detect movement. These sensors calculate how many pixels an object has moved in the camera’s field of view over a specific timeframe. To turn this into physical distance (e.g., “the drone moved 2 feet to the left”), the flight technology uses proportions. If a movement of 10 pixels equals 1 foot at an altitude of 10 feet, the system uses those ratios to scale the movement data. This proportional scaling is essential for stable hovering in environments where GPS is unavailable, such as indoors or under dense forest canopies.

From the Classroom to the Clouds: Why These Foundations Matter
When we strip away the carbon fiber frames, the brushless motors, and the high-capacity lithium-polymer batteries, flight technology is essentially a high-speed calculator. The sophistication of a flight stabilization system is directly tied to its ability to process 8th-grade mathematical concepts with extreme speed and accuracy.
The transition from 8th-grade math to flight technology is a transition from theory to application. The Pythagorean theorem ceases to be a triangle on a page and becomes the reason a drone can stay perfectly level in a 20-mph gust of wind. Linear equations cease to be a homework assignment and become the logic that prevents a drone from drifting. The coordinate plane is no longer a grid in a notebook; it is the entire world through which the drone navigates.
Understanding “what is 8th grade math” in the context of flight technology allows us to appreciate the incredible precision required for modern aerial robotics. It reminds us that the most advanced autonomous systems in the world are built upon the simple, elegant, and universal truths of mathematics—the same truths that students are mastering in classrooms every day. As flight technology continues to evolve with AI and machine learning, the complexity of the calculations will grow, but the core will always remain rooted in these fundamental mathematical principles.