The title “What does a rotator cuff do?” immediately brings to mind human anatomy, a critical set of muscles and tendons responsible for stabilizing the shoulder joint and enabling its vast range of motion. However, in the rapidly evolving world of autonomous flight and unmanned aerial vehicles (UAVs), this biological analogy serves as a remarkably apt metaphor for the complex systems that underpin a drone’s ability to achieve stable, controlled, and agile flight. Just as a biological rotator cuff orchestrates precise movement and maintains integrity, a drone’s “rotator cuff” refers to the intricate interplay of mechanical components, sensor technology, and sophisticated algorithms that collectively manage its rotational dynamics – pitch, roll, and yaw – ensuring stability, maneuverability, and directional control. This intricate system is the bedrock of all drone operations, from smooth cinematic sweeps to precision industrial inspections, placing it squarely within the domain of Flight Technology.
Without a robust and responsive “rotator cuff” system, a drone would be little more than an uncontrollable object, subject to every gust of wind and incapable of performing even the simplest of tasks. This article will delve into the multifaceted components and technologies that constitute a drone’s metaphorical rotator cuff, exploring how they work in concert to define its flight capabilities and operational efficiency.
The Core Analogy: Understanding Rotational Control in Flight
To truly appreciate the engineering marvel that is a modern drone’s flight control system, it’s beneficial to start by understanding the parallels with its biological namesake. The human rotator cuff provides dynamic stability to the shoulder, allowing for powerful movements while preventing dislocation. Similarly, a drone’s flight technology must provide dynamic stability to its airframe, enabling it to resist external forces like wind and gravitational pull, while simultaneously executing complex maneuvers.
Drawing Parallels: Stability and Range of Motion
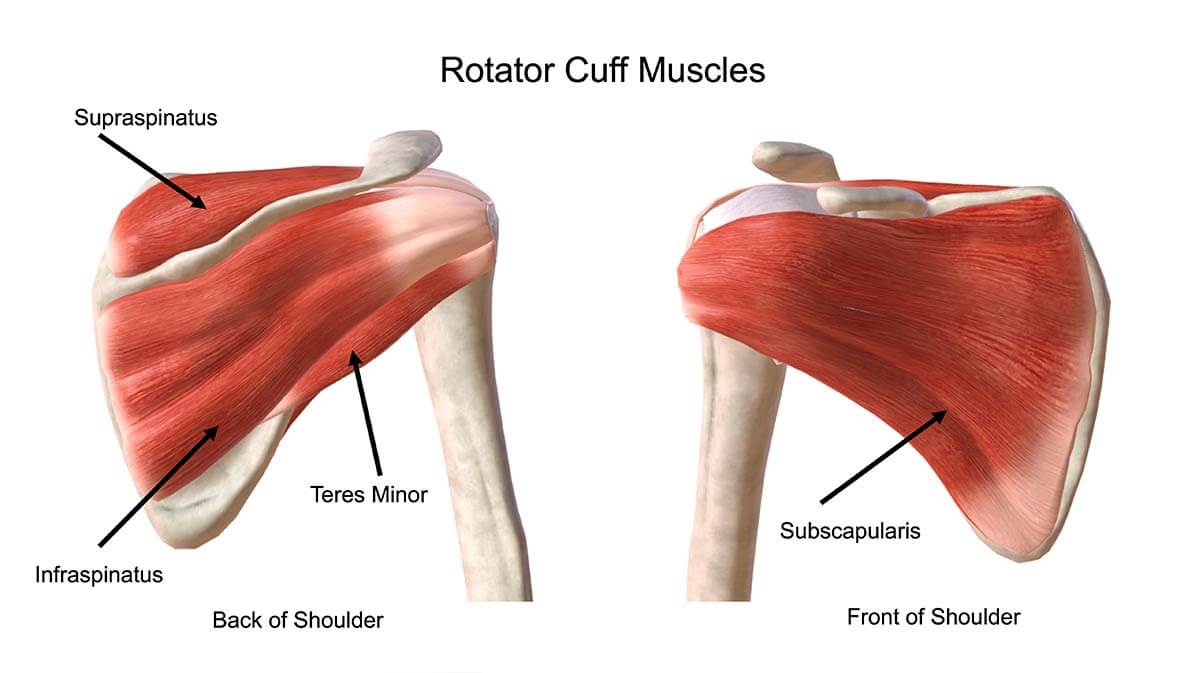
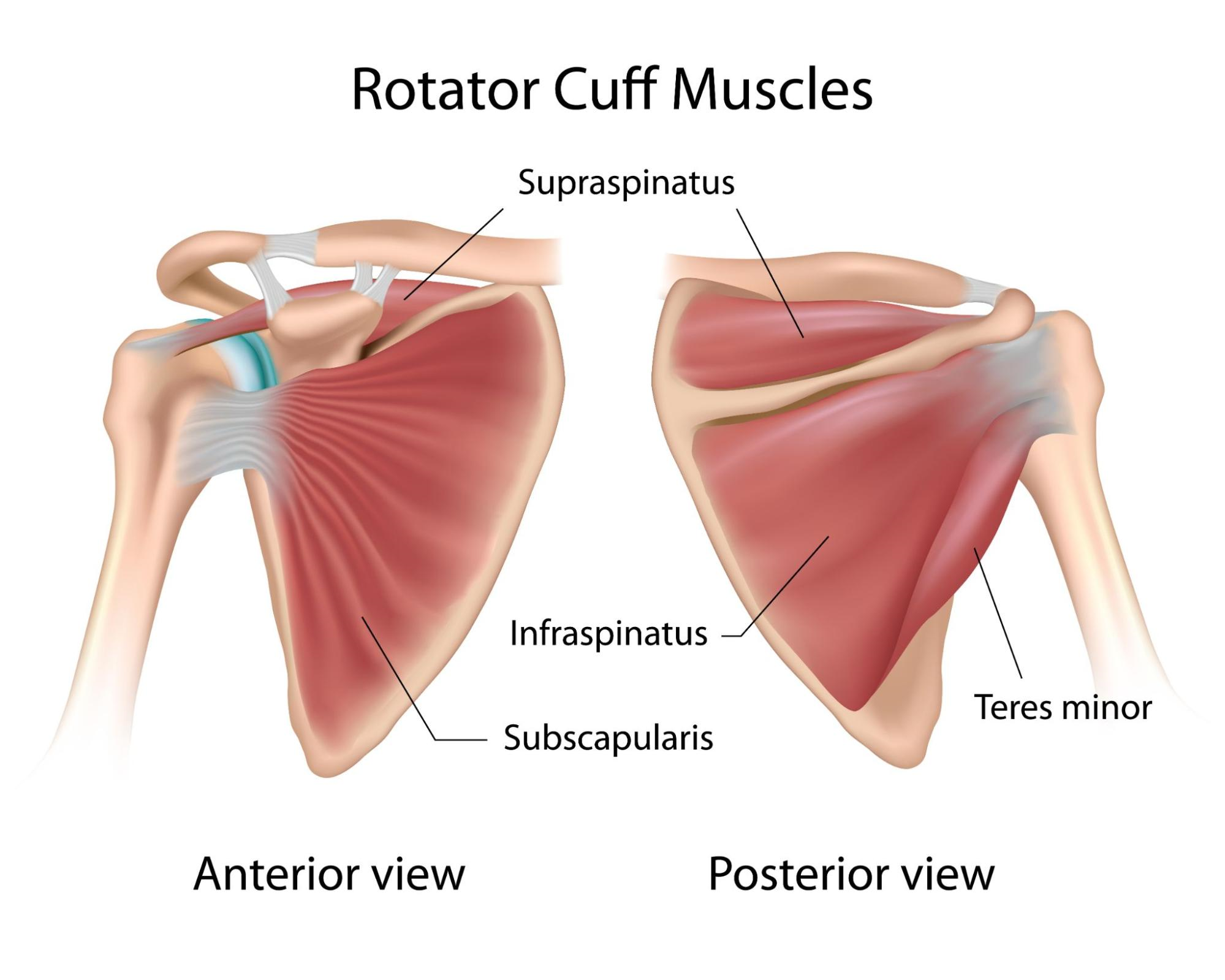
In the human shoulder, the rotator cuff muscles (supraspinatus, infraspinatus, teres minor, and subscapularis) work synergistically. They originate from the scapula and insert into the humerus, forming a “cuff” that surrounds the joint. Their primary functions include rotation, abduction (lifting away from the body), adduction (bringing towards the body), and stabilization. A healthy rotator cuff ensures that the shoulder can move freely across a wide range of motion without sacrificing stability.
For a drone, the “rotational cuff” system performs analogous functions for its flight dynamics:
- Pitch: The rotation around the lateral axis, causing the nose to point up or down. Essential for forward/backward movement.
- Roll: The rotation around the longitudinal axis, causing one side of the drone to dip. Essential for sideways movement and banking turns.
- Yaw: The rotation around the vertical axis, causing the drone to turn left or right horizontally. Essential for directional changes and precise aiming of onboard sensors or cameras.
These three rotational movements, collectively known as Euler angles, are precisely controlled to achieve desired flight paths and maintain orientation. The system managing these rotations ensures the drone can move effectively while remaining stable against disturbances.
The Fundamental Physics of Drone Rotation
Drones, particularly multirotors, achieve flight and control through the manipulation of thrust generated by their propellers. Each propeller is typically driven by an independent motor. By varying the speed of individual motors, the drone’s flight controller can create imbalances in thrust, leading to rotational forces (torques) around its center of gravity.
- To pitch forward: Rear propellers spin faster, increasing thrust at the back, tilting the nose down.
- To roll left: Right-side propellers spin faster, increasing thrust on the right, tilting the drone to the left.
- To yaw clockwise: Diagonal pairs of propellers (one spinning clockwise, one counter-clockwise) increase speed, exploiting reaction torque to rotate the drone. For example, if two propellers spinning clockwise increase speed, their reaction torque will push the drone counter-clockwise. To yaw clockwise, the flight controller commands a differential increase in speed between propellers rotating in opposite directions (e.g., increase speed of two counter-clockwise spinning props while decreasing speed of two clockwise spinning props, maintaining overall lift but creating a net yaw torque).
Understanding these fundamental principles is crucial, as they form the basis upon which all the “rotator cuff” components operate.
Mechanical Elements: The “Muscles and Tendons” of Rotation
The physical components that directly generate and transmit the forces for rotational control are the drone’s “muscles and tendons.” These include the propellers, motors, and Electronic Speed Controllers (ESCs). Their quality, efficiency, and precise coordination are paramount for stable and agile flight.
Propellers: The Primary Force Generators
Propellers are the most visible mechanical component, directly responsible for generating the lift and thrust that enables flight. Each propeller is essentially an airfoil that, when rotated, pushes air downwards, creating an upward reactive force. The size, pitch, and material of the propellers significantly influence the drone’s efficiency, thrust output, and responsiveness. Larger propellers generally provide more lift at lower RPMs, while smaller, higher-pitch propellers offer greater agility and speed. Any imbalance or damage to a propeller can severely impact rotational stability, akin to a torn tendon in a shoulder.
Brushless Motors: Powering Precision Rotation
At the heart of each propeller is a brushless DC (BLDC) motor. Unlike brushed motors, BLDC motors are highly efficient, durable, and capable of extremely precise speed control across a wide RPM range. This precision is critical for drones, as the slightest variation in motor speed can translate into unwanted pitch, roll, or yaw. These motors convert electrical energy into mechanical rotational energy, driving the propellers. Their high power-to-weight ratio is a key enabler for drone technology.
Electronic Speed Controllers (ESCs): The Crucial Link
The Electronic Speed Controller (ESC) acts as the vital intermediary between the flight controller and the brushless motors. Each motor typically has its own ESC. These miniature powerhouses receive commands from the flight controller (e.g., “spin faster,” “slow down”) and translate them into the precise electrical signals required to drive the brushless motors at the desired RPM. ESCs are responsible for commutating the motor windings, detecting motor position, and handling the high currents involved. The responsiveness and accuracy of ESCs directly impact how quickly and precisely a drone can react to flight controller commands, making them an indispensable part of the “rotator cuff” system for dynamic rotational control.
The Central Nervous System: Flight Controllers and Inertial Measurement Units
If the motors and propellers are the muscles, then the flight controller and its associated sensors are the central nervous system and sensory organs of the drone’s “rotator cuff.” They process information, make decisions, and send commands to achieve the desired flight state.
The Flight Controller (FC): The Brain of the Drone
The Flight Controller (FC) is the undisputed brain of any drone. It’s a sophisticated microcomputer that constantly monitors sensor data, executes complex algorithms, and sends precise commands to the ESCs (and thus the motors). The FC’s primary function related to rotational control is to maintain stability and execute commanded movements. It constantly calculates the drone’s current orientation and compares it to the desired orientation (either user-commanded or autonomously determined), then makes real-time adjustments to motor speeds to correct any deviations. Modern FCs are incredibly powerful, capable of performing millions of calculations per second.
Inertial Measurement Units (IMUs): Sensing Every Micro-Movement
Central to the FC’s operation is the Inertial Measurement Unit (IMU). This critical sensor package typically comprises:
- Accelerometers: Measure linear acceleration in three dimensions (X, Y, Z). The FC uses this data to infer the drone’s orientation relative to gravity and detect changes in velocity.
- Gyroscopes: Measure angular velocity (rate of rotation) around the three axes (pitch, roll, yaw). This provides immediate feedback on any rotational movement, allowing the FC to quickly counter unwanted rotations.
Together, accelerometers and gyroscopes provide the FC with a continuous, real-time understanding of the drone’s orientation and how it’s rotating. This raw data is fused and filtered by the FC to provide a highly accurate estimate of the drone’s attitude, forming the fundamental sensory input for the “rotator cuff” system.
Advanced Sensor Integration: GPS, Barometers, and Beyond
While IMUs are crucial for immediate rotational control, other sensors contribute to overall stability and navigation, providing context for the FC’s decisions:
- GPS (Global Positioning System): Provides precise positional data (latitude, longitude, altitude). This allows the drone to hold its position (position hold), follow waypoints, and navigate autonomously. While not directly measuring rotation, GPS data informs the FC about translational movement, which often requires rotational adjustments to maintain heading or path.
- Barometers: Measure atmospheric pressure to determine altitude with greater precision than GPS alone, which is essential for stable altitude hold and landing.
- Magnetometers (Compass): Provide heading information by sensing the Earth’s magnetic field, allowing the drone to maintain a consistent yaw orientation.
- Optical Flow Sensors/Lidar/Sonar: Used for indoor positioning, obstacle avoidance, and precise hovering by detecting ground features or proximity to objects. These advanced sensors inform the FC about its environment, enabling it to make more intelligent rotational adjustments for safe and effective operation.
The Art of Balance: Algorithms for Stability and Control
The mechanical components provide the power, and the sensors provide the data. It’s the sophisticated algorithms running on the flight controller that truly bring the “rotator cuff” to life, transforming raw inputs into precise, stable, and intelligent flight.
PID Loops: The Foundation of Stable Flight
The most fundamental control algorithm in nearly every drone is the Proportional-Integral-Derivative (PID) controller. For each rotational axis (pitch, roll, yaw), a PID loop constantly works to minimize the “error” between the drone’s current state (measured by IMU) and its desired state (commanded by pilot or autonomous system).
- Proportional (P) term: Reacts to the current error, applying a correction proportional to the magnitude of the error.
- Integral (I) term: Addresses steady-state errors over time, compensating for persistent biases (e.g., uneven weight distribution).
- Derivative (D) term: Predicts future error based on the rate of change of the current error, helping to damp oscillations and prevent overshooting.
Tuning these PID parameters is critical for a drone’s flight characteristics, determining its responsiveness, stability, and smoothness. A well-tuned PID controller is the secret sauce to a stable and predictable “rotator cuff.”
Autonomous Flight Modes: Precision Beyond Human Capability
Building upon PID control, modern flight controllers implement advanced algorithms for various autonomous flight modes. These modes automate complex rotational adjustments to achieve specific objectives:
- Position Hold: The drone automatically adjusts its pitch and roll to counteract wind and maintain a fixed GPS position.
- Altitude Hold: The drone uses barometer data to maintain a constant altitude, adjusting motor speeds to compensate for vertical drift.
- Waypoint Navigation: The FC calculates the necessary pitch, roll, and yaw angles to follow a pre-programmed flight path between specified GPS coordinates.
- Follow Me Mode (AI Follow): Utilizes vision systems or GPS tracking to maintain a specific distance and orientation relative to a moving subject, continuously adjusting its rotational dynamics to stay locked on.
These autonomous modes demonstrate the power of the integrated “rotator cuff” system to perform highly complex, sustained rotational control without constant human input.
Obstacle Avoidance and Terrain Following: Adaptive Rotational Control
Advanced flight technology extends the “rotator cuff’s” capabilities to dynamic environmental interaction. Obstacle avoidance systems use sensors (like lidar, ultrasonic, or stereo vision) to detect objects in the drone’s path. The flight controller then executes evasive maneuvers, which involve precise and rapid adjustments to pitch, roll, and yaw to navigate around the obstruction. Similarly, terrain following uses downward-facing sensors to maintain a consistent altitude above undulating ground, continuously adapting its vertical position through controlled pitch and roll adjustments. This level of adaptive rotational control is crucial for safe and effective operation in complex environments.
Impact and Evolution: Elevating Drone Performance and Applications
The continuous refinement of a drone’s “rotator cuff” system has been the driving force behind the dramatic expansion of drone capabilities and their integration into countless applications. From enhancing creative pursuits to revolutionizing industrial processes, the mastery of rotational control is key.
Enhancing Aerial Filmmaking and Photography
For aerial filmmakers and photographers, a stable and precise “rotator cuff” is indispensable. Smooth, cinematic shots demand absolute control over the drone’s pitch, roll, and yaw, often in conjunction with gimbal stabilization for the camera itself. The ability to perform slow, controlled movements, subtle pans (yaw), tilts (pitch), and rolls (for dynamic angles) without jutter or drift directly translates into professional-grade footage. Autonomous flight modes like orbit, helix, or active track, which involve continuous, coordinated rotational adjustments, allow creators to capture complex shots that would be impossible with manual control.
Enabling Complex Industrial and Commercial Tasks
Beyond aesthetics, the “rotator cuff” system is fundamental to industrial and commercial drone applications.
- Inspection: For inspecting infrastructure like bridges, power lines, or wind turbines, drones need to hold precise positions, fly along complex trajectories, and maintain specific orientations relative to the inspection target. This requires extremely stable pitch, roll, and yaw control, especially in challenging weather conditions.
- Mapping and Surveying: Accurate mapping relies on consistent flight paths and stable camera angles. The drone’s ability to maintain a precise heading (yaw) and level flight (pitch and roll) ensures proper photo overlap and georeferencing for creating accurate 2D maps and 3D models.
- Delivery and Logistics: Future drone delivery systems will depend heavily on robust rotational control for navigating urban environments, making precise landings, and compensating for the shifting weight of payloads.
The Future of Rotational Control: AI and Adaptive Systems
The evolution of the “rotator cuff” system continues at a rapid pace. Future advancements will likely involve even more sophisticated AI-driven algorithms capable of learning and adapting to dynamic environments in real-time. This could include:
- Reinforcement Learning: Drones learning optimal PID parameters or flight strategies on the fly based on environmental feedback.
- Swarm Intelligence: Multiple drones coordinating their rotational movements for complex collective tasks, such as flying in tight formations or collaboratively lifting heavy objects.
- Bio-Inspired Control: Drawing further inspiration from nature, perhaps developing control systems that mimic the resilience and adaptability of biological systems under stress or injury.
- Propulsion System Innovation: New motor and propeller designs, or even alternative propulsion methods, that offer even greater precision, efficiency, and redundancy in rotational control.
In conclusion, while “rotator cuff” traditionally refers to human anatomy, its conceptual application to drone flight technology is profoundly insightful. It encapsulates the interconnected network of motors, propellers, ESCs, sensors, and sophisticated algorithms that work tirelessly to provide stability, enable maneuverability, and ensure directional control across all three rotational axes. This complex “rotator cuff” is the unsung hero of modern aviation, continuously pushing the boundaries of what unmanned aerial vehicles can achieve, and it remains a core area of innovation within flight technology.