The RC time constant is a fundamental concept in electronics that describes how quickly a capacitor charges or discharges through a resistor. It’s a crucial parameter in many electronic circuits, influencing their behavior and performance. Understanding the RC time constant is particularly important in the context of drone technology, where precise control of electrical signals is paramount for flight stability, sensor operation, and communication systems.
Understanding the Fundamentals of RC Circuits
An RC circuit is composed of a resistor (R) and a capacitor (C) connected in series or parallel. When a voltage is applied to such a circuit, the capacitor begins to charge. The rate at which it charges, and subsequently discharges, is governed by the combined resistance and capacitance.
Resistors: The Gatekeepers of Current
Resistors impede the flow of electrical current. They are passive components that dissipate electrical energy as heat. The resistance of a resistor is measured in Ohms ($Omega$). In an RC circuit, the resistor’s value dictates how much current can flow into or out of the capacitor. A higher resistance means a slower flow of current, leading to a longer charging or discharging time. Conversely, a lower resistance allows current to flow more freely, resulting in faster charging and discharging.
Capacitors: The Energy Reservoirs
Capacitors store electrical energy in an electric field. They consist of two conductive plates separated by an insulating material called a dielectric. The capacitance of a capacitor is measured in Farads (F). A capacitor’s ability to store charge is directly proportional to its capacitance. In an RC circuit, the capacitor acts as a temporary storage for electrical charge. When a voltage is applied, electrons accumulate on one plate and are depleted from the other, creating a voltage difference across the capacitor.
The Interplay: How R and C Create Time
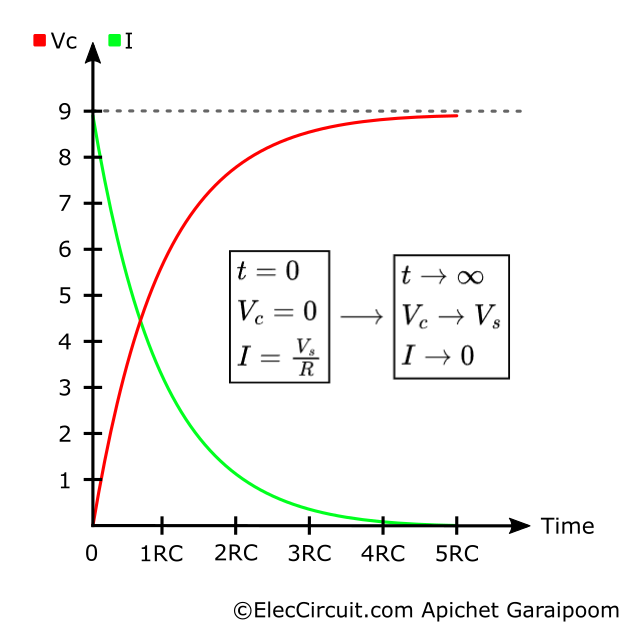
The magic happens when these two components work together. When a DC voltage source is connected to an RC series circuit, the capacitor begins to charge. Initially, the current is high because there is no voltage across the capacitor to oppose the flow. As the capacitor charges, a voltage builds up across it, which opposes the source voltage. This opposition causes the current to decrease over time.
Similarly, when the voltage source is removed and the capacitor is allowed to discharge through the resistor, the process is reversed. The stored charge flows out of the capacitor, creating a current through the resistor. The rate of discharge is also dependent on the R and C values.
Defining the RC Time Constant ($tau$)
The RC time constant, often denoted by the Greek letter tau ($tau$), is a specific measure of this charging and discharging time. It is mathematically defined as the product of the resistance (R) and the capacitance (C):
$tau = R times C$
Where:
- $tau$ is the time constant in seconds (s).
- R is the resistance in Ohms ($Omega$).
- C is the capacitance in Farads (F).
The Significance of One Time Constant
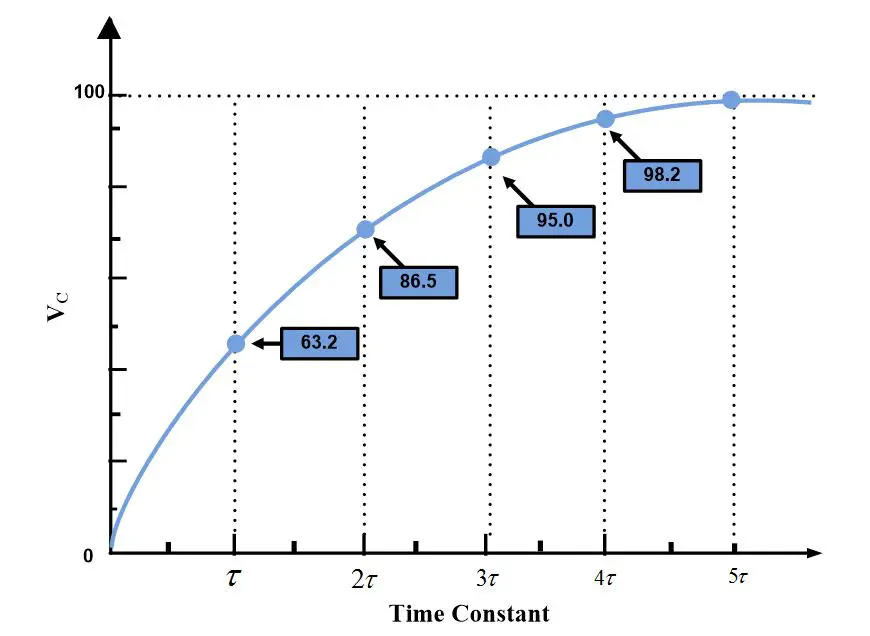
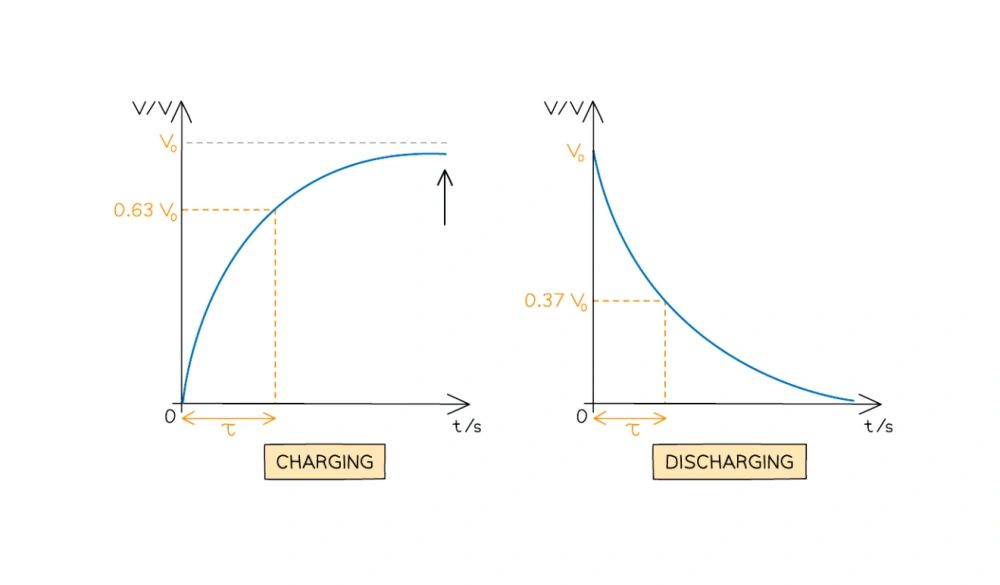
One time constant ($tau$) represents the time it takes for the capacitor’s voltage to reach approximately 63.2% of its final value during charging, or to drop to approximately 36.8% of its initial value during discharging.
This 63.2% figure might seem arbitrary, but it arises directly from the mathematical exponential charging and discharging curves of an RC circuit. After one time constant, the capacitor has charged (or discharged) by a significant portion of the total possible change.
- Charging: After 1$tau$, the voltage across the capacitor is about 63.2% of the applied voltage.
- Discharging: After 1$tau$, the voltage across the capacitor is about 36.8% of its initial voltage.
Exponential Behavior: The Curve of Charge and Discharge
The charging and discharging of a capacitor in an RC circuit follow an exponential pattern. This means that the rate of change is not constant; it is faster at the beginning and slows down as the capacitor approaches its full charge or complete discharge.
Charging: The voltage across the capacitor ($V_C$) at any given time (t) during charging can be described by the equation:
$VC(t) = V{source}(1 – e^{-t/tau})$
Where:
- $V_C(t)$ is the voltage across the capacitor at time t.
- $V_{source}$ is the source voltage.
- e is the base of the natural logarithm (approximately 2.71828).
- t is the time elapsed since the voltage was applied.
- $tau$ is the RC time constant.
Discharging: Similarly, the voltage across the capacitor ($V_C$) at any given time (t) during discharging can be described by the equation:
$VC(t) = V{initial}e^{-t/tau}$
Where:
- $V_C(t)$ is the voltage across the capacitor at time t.
- $V_{initial}$ is the initial voltage across the capacitor before discharge.
- e is the base of the natural logarithm.
- t is the time elapsed since the discharge began.
- $tau$ is the RC time constant.
Practical Implications: How Many Time Constants Matter
While one time constant is a fundamental definition, in many practical applications, a circuit is considered to have reached its steady-state (fully charged or discharged) after approximately five time constants (5$tau$). This is because after 5$tau$, the capacitor voltage has reached about 99.3% of the final value during charging, or dropped to about 0.7% during discharging. This level of change is often negligible for most practical purposes.
The RC Time Constant in Drone Systems
The RC time constant plays a subtle yet critical role in various aspects of drone operation, contributing to the responsiveness, stability, and overall performance of these complex machines. While not always explicitly calculated by the end-user, engineers designing drone systems heavily rely on understanding and leveraging RC circuit behavior.
Stabilization and Control Systems
Drones rely heavily on gyroscopes, accelerometers, and other sensors to maintain stability and execute commands. These sensors often output analog signals that need to be processed. RC circuits are frequently used in these signal conditioning stages.
- Filtering: RC circuits can act as simple low-pass or high-pass filters. In a drone’s flight controller, a low-pass RC filter might be used to smooth out noisy sensor data, removing rapid fluctuations that could otherwise lead to erratic control inputs. This filtering is essential to prevent the drone from reacting to every minor disturbance. The time constant of this filter determines how effectively it smooths the signal without unduly delaying crucial response information. A smaller time constant allows for faster responses to genuine changes in orientation, while a larger one provides more aggressive filtering but can introduce latency.
- Signal Averaging: By averaging sensor readings over a short period, RC circuits can provide a more stable and reliable input to the flight control algorithms. The time constant dictates the “memory” of the averaging process – how long past readings influence the current output.
- Actuator Control: The motors and servos that control the drone’s propellers and movements are driven by electrical signals. RC circuits can be part of the drivers and control amplifiers for these actuators, influencing how quickly they respond to commands from the flight controller. The time constant here affects the speed and smoothness with which the drone can change its pitch, roll, or yaw.
Power Management and Battery Systems
While batteries themselves don’t have a direct RC time constant in the same way as a dedicated RC circuit, the charging and discharging characteristics of a drone’s battery are influenced by the circuitry involved.
- Battery Charging Circuits: The chargers for drone batteries often utilize sophisticated charging algorithms that involve monitoring voltage and current. RC circuits can be integrated into these systems to manage the charging rate and prevent overcharging or damage to the battery. The time constant of any smoothing or filtering capacitors within the charging circuit can affect the precision of these measurements.
- Power Delivery: Ensuring consistent power delivery to various onboard systems is vital. If a sudden demand for power occurs (e.g., during aggressive maneuvers), capacitors within the power distribution system, often in conjunction with filtering resistors, can help to temporarily supply this demand and smooth out voltage drops. The time constant of these decoupling capacitors influences how quickly they can respond to transient power needs.
Communication Systems
Drones communicate with their ground control stations via radio frequencies. The transmission and reception of these signals involve complex electronic circuitry, where RC time constants play a role in tuning and filtering.
- Tuning Circuits: Radio frequency (RF) circuits often employ resonant circuits that use capacitors and inductors (and sometimes resistors, forming RLC circuits). While the primary resonance is often dominated by L and C, the presence of R (including internal resistance of components) and associated RC filtering can influence the bandwidth and response time of the communication link.
- Signal Processing: The demodulation and decoding of incoming radio signals involve filtering and signal conditioning. RC circuits can be used to shape these signals, ensuring that the information transmitted is accurately received. The time constant determines how quickly the demodulator can respond to changes in the received signal, affecting data throughput and reliability.
Advanced Applications and Design Considerations
Beyond basic filtering, the RC time constant is an integral part of more complex circuit designs and is a key consideration during the engineering and optimization of drone electronics.
PID Controllers and Their Tuning
Many drone flight controllers utilize Proportional-Integral-Derivative (PID) controllers to manage stability. While PID controllers are primarily mathematical algorithms, the components and filters used to implement them often involve RC circuits. The tuning of these PID controllers, which involves adjusting parameters to achieve desired responsiveness and stability, can be indirectly influenced by the time constants present in the sensor processing and actuator drive circuitry. For instance, if the sensor data is heavily filtered by a slow RC circuit (large time constant), the PID controller might struggle to react quickly to sudden changes.
Input/Output (I/O) Buffering and Signal Integrity
When signals are passed between different modules on a drone (e.g., from a sensor module to the flight controller), buffering circuits are often employed. These circuits use RC time constants to ensure that signals are properly shaped and that there are no unwanted oscillations or signal degradation. This is crucial for maintaining signal integrity, especially in a vibrating and electrically noisy environment like a drone.
Designing for Responsiveness vs. Stability
The choice of RC time constants in a drone’s design involves a trade-off between responsiveness and stability.
- Fast Response (Small $tau$): A smaller time constant means the capacitor charges and discharges quickly. This leads to very responsive systems, allowing the drone to react rapidly to control inputs and external disturbances. However, if the time constant is too small, the system can become overly sensitive to noise, leading to instability or oscillations.
- High Stability (Large $tau$): A larger time constant means slower charging and discharging. This leads to smoother signals and more stable operation, as rapid fluctuations are filtered out. However, if the time constant is too large, the system can become sluggish, leading to delayed responses and a feeling of the drone being “heavy” or unresponsive.
Engineers meticulously calculate and select resistor and capacitor values for specific applications to achieve the desired balance. This often involves extensive simulation and real-world testing to fine-tune the performance.
Future Innovations and the RC Time Constant
As drone technology advances, with increasing autonomy, sophisticated sensor suites, and more complex flight dynamics, the role of precise electrical signal processing will only become more critical. The fundamental principles of the RC time constant will continue to underpin these advancements, influencing the design of next-generation flight controllers, advanced sensor fusion algorithms, and high-speed communication systems. Understanding this seemingly simple concept is, therefore, foundational to appreciating the intricate engineering that makes modern drones soar.