In the dynamic and rapidly evolving landscape of autonomous drone technology, precision, reliability, and robust system integrity are paramount. While the term “Intention to Treat” (ITT) originates from the rigorous world of clinical trials, where it denotes a strategy for analyzing participants based on their initial treatment assignment regardless of protocol adherence, its underlying philosophy offers a profoundly relevant framework for understanding and optimizing the design and deployment of advanced drone systems. By extending this concept metaphorically, we can explore how autonomous drones are engineered to uphold their core mission objectives and design parameters, even when confronted with the inherent unpredictability of real-world operational environments.
Just as a clinical trial aims to preserve the integrity of initial randomization to prevent bias, autonomous drone systems are increasingly designed with an “Intention to Treat” approach. This means that the system’s analytical framework and operational logic are anchored to its initial programming, mission parameters, and design goals, rather than solely reacting to every transient deviation or unexpected input during live operation. This paradigm is crucial for ensuring the safety, consistency, and ultimate reliability of drones engaged in complex tasks like autonomous mapping, AI-powered object tracking, remote sensing, and precision agriculture. It’s about building systems that “intend to treat” all encountered data and situations through the lens of their foundational objectives, mitigating the impact of real-world noise and inconsistencies.
The Core Concept: Bridging Clinical Rigor with Autonomous Flight
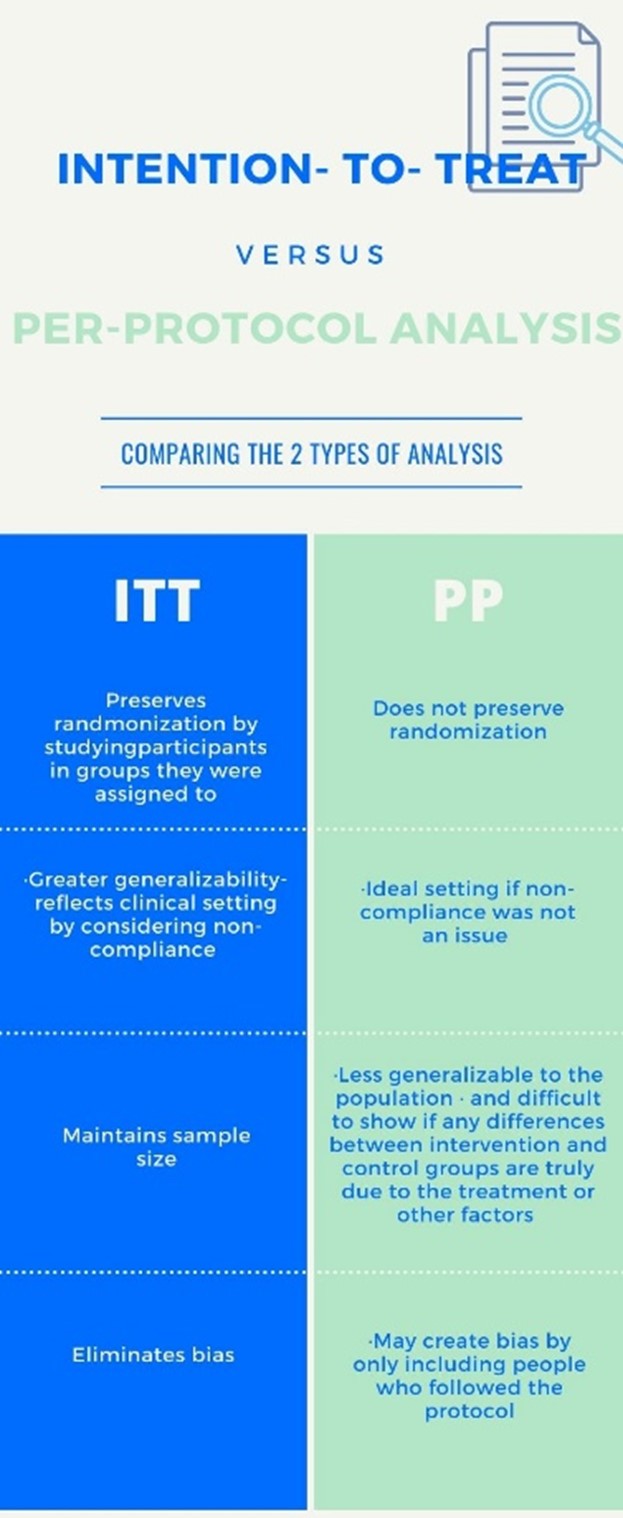
To properly contextualize “Intention to Treat” within drone technology, it’s helpful to briefly revisit its origins. In clinical research, the ITT principle asserts that once a subject is randomized into a study group, their data should be analyzed as part of that group, irrespective of whether they complete the protocol, switch treatments, or drop out. This methodological rigor is vital for preventing selection bias and ensuring that the trial results accurately reflect the effect of the assignment to treatment under real-world conditions, including patient non-compliance.
Translating this to autonomous drones, the “Intention to Treat” concept shifts from human subjects to technological systems and their programmed missions. Here, “intention” refers to the drone’s predefined mission, its embedded algorithms, safety protocols, and the desired outcomes established during its design phase. “To Treat” describes how the drone’s onboard intelligence processes, interprets, and responds to all sensor data, environmental variables, and operational events based on this initial intention. It’s a commitment to the integrity of the original design and mission parameters, even when external factors introduce variability or challenge the ideal execution.
This paradigm is particularly critical in systems where real-time decisions have significant implications for safety, data quality, or mission success. Without such a guiding principle, autonomous drones might become overly reactive, susceptible to minor sensor glitches, environmental anomalies, or communication dropouts, leading to unstable performance or mission failure. By embracing an “Intention to Treat” philosophy, drone developers strive to create systems that are not just smart, but also resilient and consistently aligned with their fundamental purpose.
Architecting Intent: Design Principles for Robust Autonomy
The foundation of an “Intention to Treat” approach in autonomous drones lies in how the “intention” itself is architected into the system. This involves meticulous planning during design, robust programming, and intelligent data management.
Initial Programming and Mission Parameters
Every autonomous drone system is built upon a bedrock of initial programming that defines its core capabilities, operational limits, and mission objectives. This includes:
- Mission Plans: Pre-defined flight paths, waypoints, areas of interest for mapping, or specific targets for inspection.
- Behavioral Algorithms: Rules for obstacle avoidance, navigation in GPS-denied environments, maintaining formation, or executing specific actions (e.g., hovering, landing, image capture sequences).
- Safety Protocols: Geo-fencing, automatic return-to-home mechanisms, minimum altitude settings, and emergency landing procedures.
- Performance Metrics: Desired accuracy for mapping, stability for video capture, or efficiency for delivery routes.
These initial programs and parameters represent the drone’s “intended treatment plan” for a given operation. They are the baseline against which all real-time data and actions are evaluated. The “Intention to Treat” principle dictates that even if a sensor temporarily malfunctions, or a subtle wind gust pushes the drone slightly off course, the system’s decision-making framework should strive to bring it back in line with these initial intentions or safely revert to a predetermined fail-safe, rather than catastrophically altering its fundamental mission based on transient noise.
Sensor Fusion and Data Integrity
Modern autonomous drones rely on an array of sensors—GPS, IMUs (Inertial Measurement Units), LiDAR, cameras, ultrasonic, thermal—to perceive their environment. The challenge lies in integrating this vast stream of data, much of which can be noisy, inconsistent, or even contradictory. An “Intention to Treat” perspective in sensor fusion means:
- Prioritizing Reliable Data: Algorithms are designed to weigh sensor inputs based on their known reliability and current environmental conditions, rather than treating all inputs equally. If one sensor briefly provides anomalous data, the system’s “intention” to maintain its mission is upheld by relying more heavily on other, more stable data sources, rather than allowing a single outlier to derail the entire operation.
- Predictive Modeling: The system doesn’t just react to current data; it uses predictive models based on its intended flight path and known dynamics to anticipate future states. Deviations are then assessed not just as real-time errors, but against these predicted “intended” states.
- Anomaly Detection: Algorithms are trained to distinguish between genuine environmental changes and sensor anomalies or noise. Only significant, validated deviations trigger a shift from the primary “intention,” and even then, such shifts are often guided by secondary, pre-programmed intentions (e.g., activate obstacle avoidance, initiate a safety climb).
Handling Deviations: The “Treatment” of Real-World Variances
The true test of the “Intention to Treat” principle in autonomous drones comes when the system encounters real-world deviations. How the drone “treats” these variances—meaning how it processes and responds to them—is critical to maintaining mission integrity.

Adaptive Algorithms and Predictive Modeling
Autonomous drones are equipped with sophisticated adaptive algorithms that allow them to adjust their operations in response to environmental changes while staying true to their overall mission. For example:
- Path Planning Recalibration: If an unexpected obstacle appears in an autonomous delivery route, the drone’s “intention” is to still deliver the package safely to its destination. Instead of stopping or returning, the system will use its adaptive path planning to find an alternative route that fulfills the original delivery intention, minimizing deviation from the goal.
- Dynamic Stabilization: In gusty winds, the flight controller’s “intention” is to maintain a stable hover or precise trajectory. While the drone might temporarily be pushed off course, its stabilization algorithms continuously make micro-adjustments to counteract these external forces, treating the wind as a transient factor to be overcome rather than a reason to abandon the mission intent.
- AI-Follow Mode Resilience: In an AI follow scenario, the “intention” is to keep a subject perfectly framed. If the subject briefly goes behind an obstacle or makes an erratic movement, the system’s ITT approach means it uses predictive tracking to anticipate where the subject will reappear or intelligently repositions itself to regain the lock, rather than simply losing track and ending the follow.
Error Correction and Failsafe Mechanisms
Integral to the “Intention to Treat” paradigm are robust error correction and failsafe mechanisms. These systems are designed to ensure that even when critical deviations occur, the drone reverts to a known safe state or attempts to correct course based on its primary mission intention.
- GPS Signal Loss: If a drone loses GPS signal, its “intention” to navigate safely is upheld by transitioning to visual inertial odometry (VIO) or other sensor-based navigation methods, attempting to regain GPS lock, or activating an autonomous return-to-home based on its last known good position. It doesn’t simply become a dumb brick, but “treats” the signal loss by falling back on secondary, pre-programmed intentions for safe operation.
- Battery Management: When battery levels drop below a critical threshold, the “intention” shifts from mission completion to safe recovery. The system might automatically initiate a return-to-home sequence or identify the nearest safe landing zone, prioritizing the protection of the asset over the immediate continuation of a potentially unachievable mission.
- Software Glitches: In the event of minor software anomalies, watchdog timers and redundant systems are designed to reset or switch over to backup processes, ensuring that the drone continues to operate according to its fundamental programming “intention,” preventing uncommanded behaviors.
Benefits of the “Intention to Treat” Paradigm in Drones
Adopting an “Intention to Treat” philosophy in autonomous drone development yields several significant benefits, enhancing the overall utility and trustworthiness of these advanced systems.
Enhancing Reliability and Safety
By consistently adhering to initial design parameters and mission objectives, drones operating under an ITT framework exhibit greater reliability. They are less prone to erratic behavior caused by minor environmental disturbances or sensor noise. This translates directly to improved safety, as the system’s response to unforeseen events is predictable and aligned with established safety protocols, reducing the risk of accidents or unintended actions. For instance, a delivery drone’s intention to land at a specific point safely is maintained even if a sudden wind gust tries to push it off target; its systems are designed to correct and fulfill that primary intention.
Ensuring Data Consistency and Actionability
For applications like mapping, remote sensing, and inspection, data consistency is paramount. An “Intention to Treat” approach ensures that collected data remains true to the mission’s original specifications. If a mapping drone’s “intention” is to capture imagery at a specific altitude and overlap, its systems will actively work to maintain these parameters, adjusting for terrain changes or wind. This consistency means the resulting datasets are more accurate, reliable, and actionable for subsequent analysis, as they are less contaminated by extraneous variables introduced by uncontrolled deviations during flight.
Challenges and Future Directions
While the “Intention to Treat” concept offers a powerful framework, its implementation in autonomous drones faces unique challenges and continuous evolution.
The Dynamic Nature of Unforeseen Events
Unlike clinical trials where patient non-compliance is a known variable, the real-world operational environment for drones is infinitely dynamic. Unforeseen weather events, sudden changes in airspace, unexpected obstacles, or rapidly evolving target behaviors can test the limits of pre-programmed intentions. The challenge lies in designing systems that can maintain their core “intention” while intelligently adapting to truly novel situations without jeopardizing safety or mission integrity.

Evolving AI and Machine Learning Capabilities
The future of “Intention to Treat” in autonomous drones will be profoundly shaped by advancements in AI and machine learning. Deep learning models can be trained to recognize and categorize an unprecedented array of environmental conditions and anomalies, allowing drones to “treat” complex situations with greater nuance.
- Reinforcement Learning: Drones can learn optimal strategies for maintaining mission intent even in highly variable environments through trial and error, dynamically adjusting their “treatment” plans based on experience.
- Explainable AI (XAI): Developing XAI capabilities will allow drone operators to understand why an autonomous system made a particular decision when deviating from its initial plan, fostering trust and enabling better refinement of the “intention to treat” framework.
- Swarm Intelligence: In multi-drone operations, the “Intention to Treat” principle extends to the collective. Swarms need to maintain their overall mission intent (e.g., cover an area, form a pattern) even if individual drones encounter issues, with other drones “treating” the situation by adapting their roles to ensure the collective objective is met.
In conclusion, the metaphorical adoption of “Intention to Treat” for autonomous drone operations underscores a fundamental principle: the commitment to design integrity and mission fidelity. As these sophisticated flying machines become increasingly integrated into various industries, their ability to consistently act in accordance with their foundational programming, even amidst the chaos of the real world, will define their success. By architecting “intention” deeply into their systems and developing intelligent ways to “treat” real-world variability, drone technology continues to push the boundaries of what’s possible, delivering unparalleled reliability and performance in the skies.