In the ever-evolving landscape of technology, especially within the realm of sophisticated systems like those powering advanced drones and their associated imaging capabilities, the concept of efficient and reliable resource management is paramount. As we delve deeper into the intricacies of multi-threaded programming, a fundamental concept emerges that underpins the stability and correct operation of complex software: the mutex. While the term itself might sound abstract, its practical implications are far-reaching, ensuring that critical operations are executed in an orderly and predictable fashion, thereby preventing chaos and ensuring the seamless functioning of our technological marvels.
Understanding the Need for Synchronization
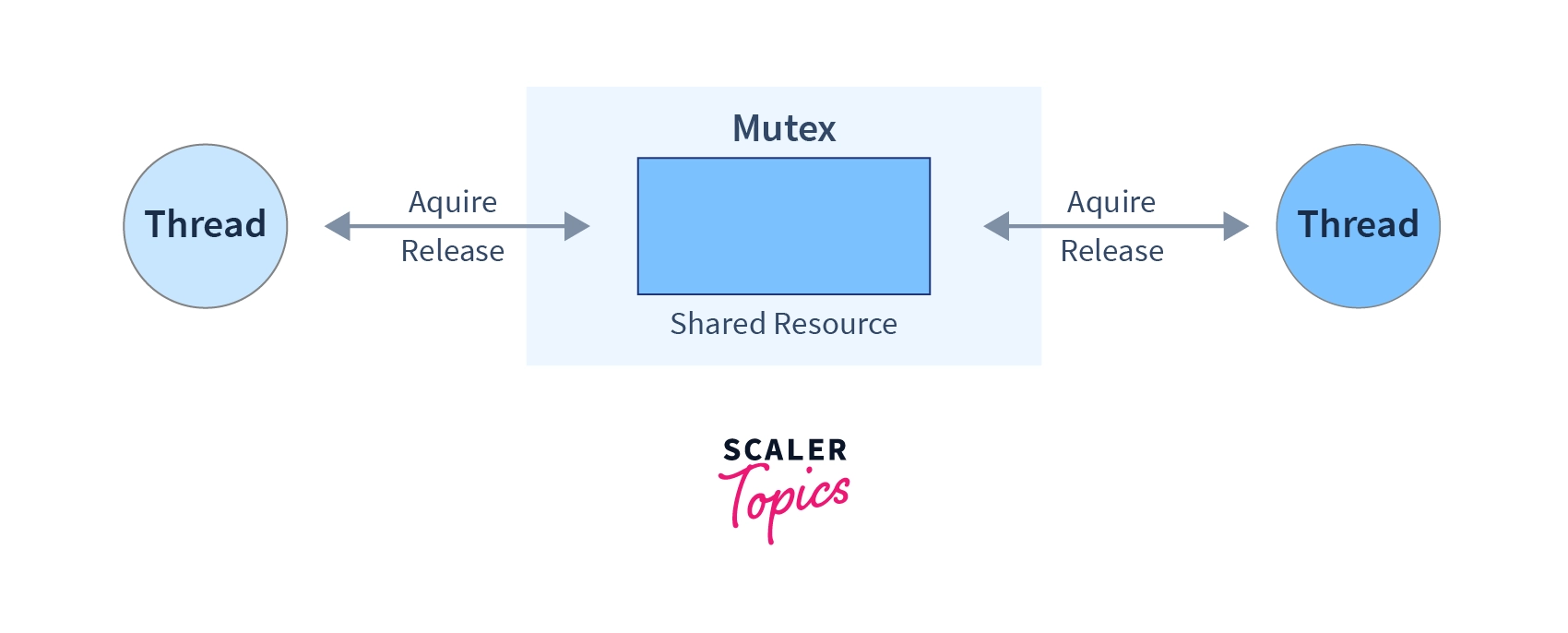
At its core, a mutex, short for Mutual Exclusion, is a synchronization primitive used in concurrent programming to prevent multiple threads or processes from accessing a shared resource simultaneously. Imagine a bustling airport with a single runway. If multiple planes tried to land or take off at the exact same time, it would lead to immediate chaos and potential disaster. Mutexes act as the air traffic controllers of the software world, ensuring that only one “plane” (thread) can access the “runway” (shared resource) at any given moment.
The Challenge of Shared Resources
In modern computing, particularly in applications that demand high performance and responsiveness, such as those found in advanced drone operations, multi-threading is a common technique. Threads are independent sequences of execution that can run concurrently, allowing a program to perform multiple tasks seemingly at once. This concurrency offers significant benefits, from faster processing to more interactive user experiences.
However, when multiple threads need to access and modify the same piece of data or hardware resource – often referred to as a “shared resource” – problems can arise. Consider a scenario where two threads are trying to update a single counter variable. If not properly synchronized, the following could happen:
- Thread A reads the counter value (e.g., 5).
- Thread B reads the counter value (also 5).
- Thread A increments its local copy of the value to 6 and writes it back to the shared variable.
- Thread B increments its local copy of the value to 6 and writes it back to the shared variable.
The expected result was for the counter to be 7 (5 + 1 + 1), but due to the interleaved execution, it ends up being 6. This phenomenon, known as a race condition, can lead to data corruption, inconsistent states, and unpredictable program behavior. In a drone system, such race conditions could have serious consequences, from inaccurate sensor readings to flight control malfunctions.
The Role of Synchronization Primitives
To combat these issues, synchronization primitives are employed. These are mechanisms that allow threads to coordinate their access to shared resources. Mutexes are one of the most fundamental and widely used synchronization primitives. They provide a mechanism to enforce mutual exclusion, guaranteeing that a critical section of code, which accesses the shared resource, can only be executed by one thread at a time.
How Mutexes Ensure Mutual Exclusion
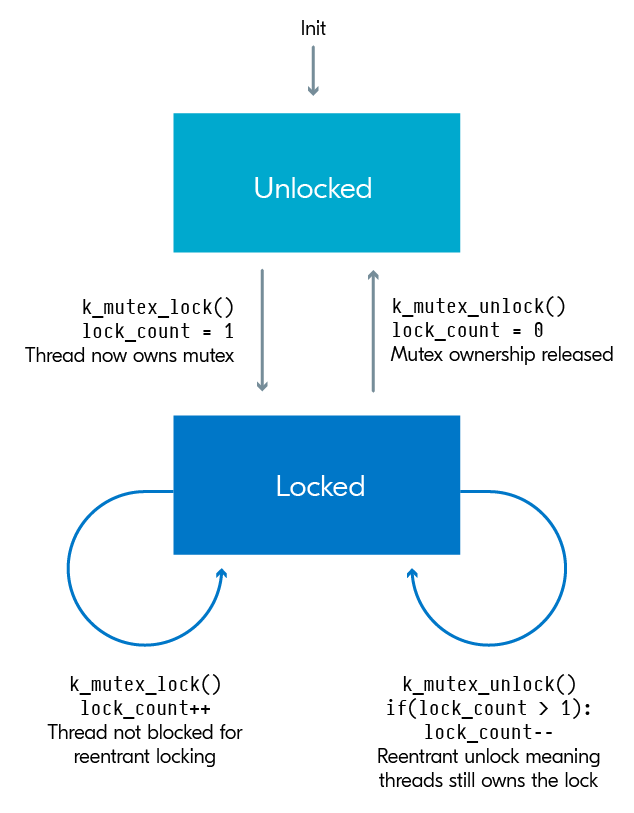
The fundamental operation of a mutex revolves around two primary actions: locking and unlocking. A mutex can be in one of two states: unlocked or locked.
The Lock and Unlock Operations
-
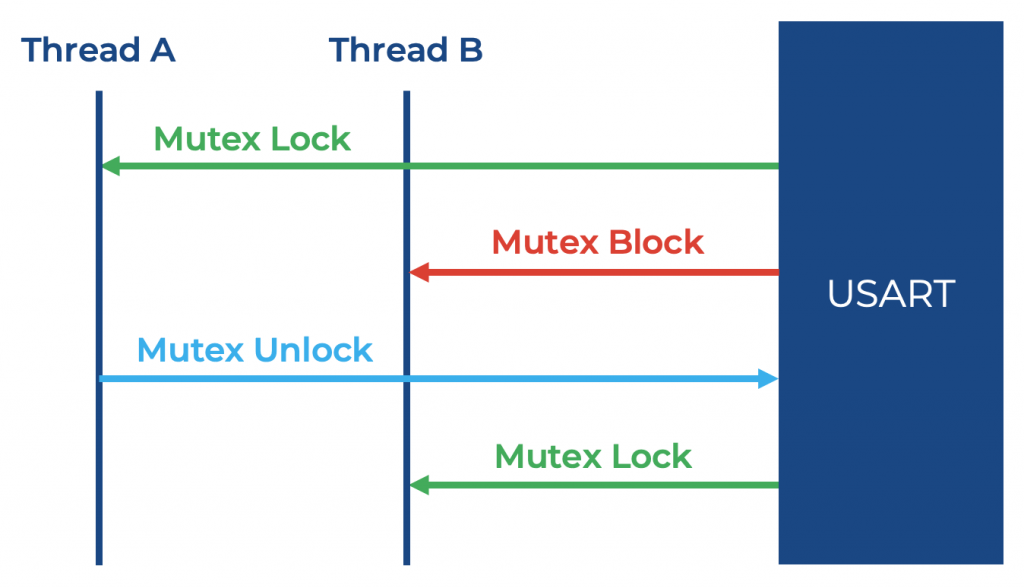
Locking (Acquiring the Mutex): When a thread needs to access a shared resource, it first attempts to “lock” the mutex associated with that resource.
- If the mutex is currently unlocked, the thread successfully acquires the lock, and the mutex transitions to the locked state. The thread can then proceed to access the shared resource.
- If the mutex is already locked by another thread, the current thread will be blocked. It will have to wait until the mutex is unlocked. The operating system or threading library typically handles this waiting process, often putting the thread to sleep until it can acquire the lock.
-
Unlocking (Releasing the Mutex): Once the thread has finished accessing the shared resource, it must “unlock” the mutex. This action makes the mutex available for other waiting threads to acquire. It is crucial that a thread always unlocks a mutex it has locked; failing to do so can lead to a deadlock scenario (discussed later).
Critical Sections
The code segment that accesses the shared resource is known as the critical section. The pattern for using a mutex typically looks like this:
lock(mutex);
// --- Critical Section Start ---
// Access and modify the shared resource here.
// For example, read sensor data, update flight parameters.
// --- Critical Section End ---
unlock(mutex);
By enclosing the critical section within the lock and unlock operations, we ensure that only one thread can execute the code within the critical section at any given time. This prevents race conditions and ensures data integrity.
Advanced Concepts and Potential Pitfalls
While the basic concept of locking and unlocking is straightforward, the effective use of mutexes involves understanding their nuances and potential challenges.
Ownership and Recursion
In most standard mutex implementations, the thread that locks a mutex is the only thread that can unlock it. This principle is known as ownership. Attempting to unlock a mutex that you haven’t locked, or that is already unlocked, can lead to errors.
Some mutex implementations also support recursion. A recursive mutex can be locked multiple times by the same thread. Each lock operation increments an internal counter, and an unlock operation decrements it. The mutex is only truly unlocked when the counter reaches zero. Recursive mutexes can be useful in certain complex scenarios, but they can also obscure the flow of control and are generally less efficient than non-recursive mutexes. For most typical use cases, a non-recursive mutex is preferred.
Deadlocks: The Standoff
One of the most significant challenges when working with mutexes is the possibility of a deadlock. A deadlock occurs when two or more threads are blocked indefinitely, each waiting for a resource that the other thread holds.
Consider two threads, Thread A and Thread B, and two shared resources protected by Mutex X and Mutex Y:
- Thread A needs to access both Resource 1 and Resource 2. It first acquires Mutex X for Resource 1.
- Thread B also needs to access both Resource 1 and Resource 2. It first acquires Mutex Y for Resource 2.
- Now, Thread A attempts to acquire Mutex Y for Resource 2, but Mutex Y is held by Thread B, so Thread A blocks.
- Meanwhile, Thread B attempts to acquire Mutex X for Resource 1, but Mutex X is held by Thread A, so Thread B blocks.
Both threads are now waiting for each other, and neither can proceed. This is a classic deadlock scenario. In a drone system, a deadlock could freeze critical processes, leading to loss of control or system failure.
Strategies to Avoid Deadlocks:
- Consistent Lock Ordering: Always acquire mutexes in the same predefined order. If all threads that need both X and Y always acquire X before Y, the above scenario would be avoided.
- Timeouts: When attempting to acquire a mutex, set a timeout. If the mutex cannot be acquired within the timeout period, the thread can back off, release any locks it holds, and retry later.
- Deadlock Detection and Recovery: More complex systems might implement algorithms to detect deadlocks and attempt to recover by terminating one or more of the involved threads.
Performance Considerations
While mutexes are essential for correctness, they do introduce overhead. The process of acquiring and releasing a lock, and potentially blocking and unblocking a thread, takes time. In highly performance-sensitive applications, excessive use of mutexes or poorly designed critical sections can become a bottleneck.
- Minimizing Critical Section Size: Keep the code within the critical section as short and efficient as possible. Perform as much work as possible outside the critical section.
- Reducing Contention: Design your system to minimize the number of threads that need to access the same resources simultaneously. This might involve using finer-grained locks or alternative synchronization mechanisms.
Mutexes in Real-World Applications (e.g., Drones and Imaging)
The principles of mutexes are fundamental to the operation of many complex systems, including those involved in advanced drone technology.
Drone Flight Control Systems
In a drone, multiple threads might be responsible for different aspects of flight: processing sensor data (IMU, GPS, lidar), calculating control commands, executing motor commands, and communicating with the ground station.
-
Sensor Data Processing: A thread might read raw sensor data from hardware. This data then needs to be processed and potentially fused with data from other sensors. A mutex could protect the shared data structures where this processed data is stored, ensuring that only one thread modifies it at a time while others are reading it. For instance, a flight controller thread might need to read the latest altitude reading from a barometric sensor thread. If the altitude data structure is not protected, the flight controller might read an inconsistent or partially updated value, leading to erratic flight behavior.
-
Command Execution: The flight control algorithm determines the desired trajectory and motor outputs. This decision-making process needs to access and modify shared state representing the drone’s current position, velocity, and desired attitude. Mutexes ensure that updates to these critical parameters are atomic, preventing race conditions that could destabilize the drone.
Gimbal and Camera Systems
Advanced drones often feature sophisticated camera and gimbal systems, which themselves involve complex software.
-
Gimbal Stabilization: A gimbal’s primary function is to keep the camera level or pointed in a specific direction, regardless of the drone’s movements. This involves real-time adjustments to motors based on sensor feedback. A thread controlling the gimbal’s articulation needs to read the desired camera angle and the current drone orientation. Mutexes can protect the shared data structures that hold these values, ensuring that the gimbal control loop receives consistent and up-to-date information, leading to smooth and stable footage.
-
Camera Settings and Data Streaming: When a drone is capturing 4K video or high-resolution stills, multiple processes might be involved: managing camera settings, capturing frames, encoding video, and potentially offloading data to onboard storage or a remote link. Mutexes can be used to synchronize access to shared resources like camera buffers or configuration parameters, preventing corruption of image data or incorrect setting application. For example, a thread responsible for setting the camera’s ISO might need exclusive access to the camera’s configuration registers to prevent conflicts with a thread that is actively capturing frames.
Conclusion
Mutexes are an indispensable tool in the arsenal of any programmer dealing with concurrent systems. They provide a fundamental mechanism for managing access to shared resources, preventing race conditions, and ensuring the integrity and stability of complex software. While their core concept is simple – one thread at a time – their correct implementation and understanding are vital for building robust and reliable applications, from the most intricate flight control systems of advanced UAVs to the seamless operation of their sophisticated imaging payloads. By carefully employing mutexes and being mindful of potential pitfalls like deadlocks, developers can harness the power of concurrency without sacrificing predictability and safety.