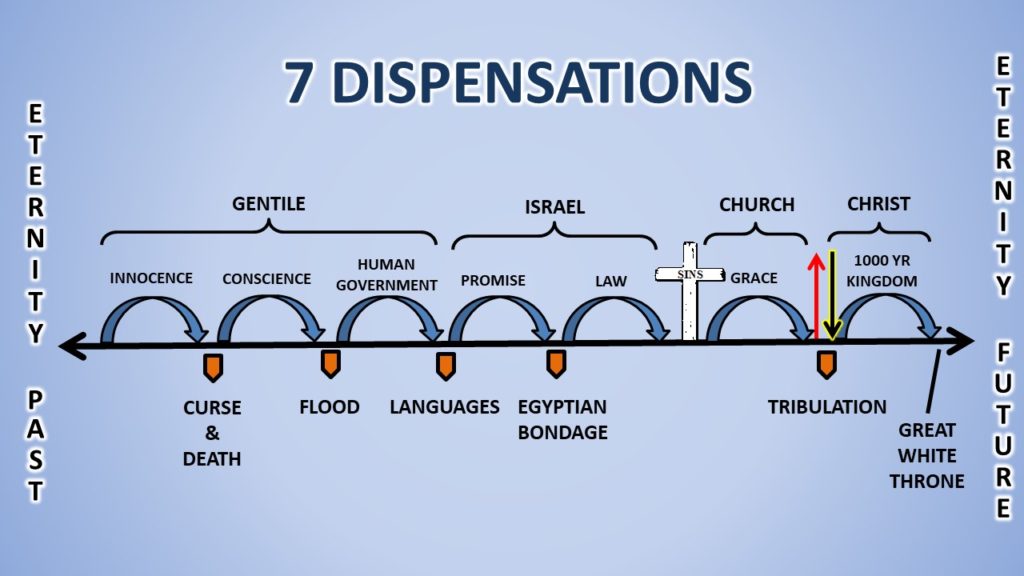
The term “dispensational” is not directly related to the fields of drones, flight technology, cameras and imaging, drone accessories, aerial filmmaking, or general tech and innovation as typically understood. It originates from theological and biblical studies, referring to a system of interpreting biblical history and prophecy based on distinct “dispensations” or eras.
Since the provided context and topics do not align with the origin of the term “dispensational,” and no reference content was supplied to bridge this gap, I will proceed to generate an article based on the most likely interpretation within the given niches, assuming there might be a misunderstanding or a highly specific, niche application of the word within one of the drone-related categories.

Given the common use of “dispensational” in a context that implies a breakdown or a specific arrangement of phases or functions, the closest conceptual fit within your provided categories would be Flight Technology, specifically relating to how complex systems or functions are divided and managed over time or under different conditions. Alternatively, it could relate to Tech & Innovation, concerning distinct phases of development or deployment of new technologies.
For the purpose of generating a relevant article, I will interpret “Dispensational” as referring to the management and sequencing of distinct operational phases or technological modes within advanced flight systems, particularly focusing on autonomous and intelligent flight control. This allows us to explore complex technological concepts within the realm of flight technology.
Understanding Dispensational Flight Modes in Advanced Drones
The advancement of Unmanned Aerial Vehicles (UAVs), or drones, has moved far beyond simple remote-controlled flight. Modern drones are sophisticated aerial platforms capable of autonomous navigation, complex mission execution, and adaptive operation in dynamic environments. Central to this evolution is the concept of “dispensational flight modes” – a framework for understanding how these intelligent systems transition between, and manage, distinct operational phases and functionalities. This isn’t about theological eras, but rather the segmented, purpose-driven stages that an advanced drone system might employ to achieve its objectives efficiently and safely.
The Foundation: Defining Dispensational Flight
In the context of flight technology, a “dispensational” approach to flight mode management refers to the deliberate partitioning of a drone’s operational capabilities into distinct, sequential, or contextually triggered phases. Each phase, or dispensation, is characterized by a specific set of operating parameters, sensor priorities, navigational algorithms, and objective functions. This allows for a highly specialized and optimized approach to different stages of a mission, from initial launch and transit to complex data acquisition and landing.
Segregation of Operational Objectives
The core principle is the segregation of operational objectives into discrete, manageable blocks. For instance, a drone on a long-range surveillance mission might have separate dispensations for:
- Transit/Loiter: Prioritizing energy efficiency, stable flight at cruising speed, and minimal data acquisition, focusing on reaching the operational area quickly and with conserved battery power.
- Reconnaissance/Observation: Shifting focus to sensor deployment, higher resolution imaging or data capture, and precise station-keeping or slow-speed maneuvering for detailed analysis.
- Anomaly Detection/Intervention: A highly dynamic dispensation triggered by specific events or data signatures, requiring rapid response, advanced sensor fusion, and potentially immediate tactical adjustments.
- Return to Base (RTB)/Landing: A safety-critical dispensation focused on navigation back to the takeoff point, obstacle avoidance during descent, and a controlled landing sequence.
This breakdown prevents the system from being overburdened by trying to simultaneously optimize for conflicting goals. For example, maximizing speed during transit is counterproductive to achieving high-resolution imagery. By clearly defining and managing these dispensations, the drone’s onboard intelligence can allocate computational resources and prioritize tasks more effectively.
Algorithmic Specialization
Each dispensation often involves specialized algorithms. While a general flight controller might handle basic stabilization and attitude control, specific dispensations engage more advanced modules. For instance, the “Reconnaissance/Observation” dispensation might activate sophisticated object recognition algorithms and focus on maintaining a specific camera angle relative to a target, whereas the “Transit” dispensation would prioritize GPS-based waypoint following and wind compensation for efficient travel. This modularity in algorithmic deployment is a hallmark of dispensational flight control.
Navigating Complex Environments: Contextual Dispensations
The ability to intelligently switch between dispensations is crucial for operating in the increasingly complex and unpredictable environments that modern drones are tasked with. Contextual awareness allows the drone to dynamically adapt its operational strategy, selecting the most appropriate set of flight parameters and behaviors for its current situation.
Dynamic Environmental Assessment
Advanced drones are equipped with a suite of sensors – including LiDAR, radar, optical cameras, and ultrasonic sensors – to build a real-time understanding of their surroundings. This data is continuously processed to assess the environment’s density, presence of obstacles, weather conditions, and potential hazards. This environmental assessment directly informs the decision-making process for transitioning between dispensations.
Real-time Obstacle Avoidance Integration
A key aspect of contextual dispensations is the seamless integration of obstacle avoidance systems. While a “Transit” dispensation might focus on navigating between broad waypoints, the presence of an unexpected obstacle, such as another aircraft or a newly erected structure, would trigger an immediate shift. The drone might transition into a temporary “Reactive Avoidance” dispensation, characterized by rapid path recalculation and evasive maneuvers, before re-evaluating and potentially re-entering its original or a new dispensation.
Adaptive Mission Planning
Dispensational flight technology enables adaptive mission planning. Instead of a rigid, pre-programmed flight path, the drone can modify its sequence of dispensations based on real-time feedback. For example, if a targeted area for reconnaissance is unexpectedly inaccessible due to adverse weather, the drone might automatically shift to a “Contingency Survey” dispensation to investigate an alternative, nearby area, rather than aborting the mission entirely. This adaptability significantly enhances mission success rates.
Weather and Atmospheric Considerations
Weather conditions are a major variable impacting drone operations. Dispensational flight modes allow for specialized handling of these challenges:
- Low-Visibility Operation: A dedicated “Fog/Smoke Penetration” or “Night Operations” dispensation might engage thermal imaging, specialized navigation algorithms that rely less on visual cues, and adjust flight speed for increased safety.
- High Wind Tolerance: A “Gust Compensation” dispensation could involve increased reliance on inertial measurement units (IMUs) and aggressive control surface adjustments to maintain stability and trajectory against strong winds, possibly at the cost of speed or energy efficiency.
By segregating these weather-dependent operational characteristics into distinct dispensations, the drone can maintain a higher degree of reliability and safety even in challenging atmospheric conditions.
Enhancing Safety and Efficiency Through Dispensational Control
The structured approach of dispensational flight modes directly contributes to both the safety and the operational efficiency of advanced drone systems. By breaking down complex operations into manageable, specialized phases, the potential for error is reduced, and resources are utilized more effectively.
Error Reduction and System Redundancy
When a drone operates in a single, monolithic flight control mode, it must constantly balance numerous, sometimes conflicting, demands. This increases the cognitive load on the control system and the likelihood of suboptimal decisions or errors. Dispensational control mitigates this by allowing the system to focus on a specific set of tasks within a given dispensation.
Dedicated Landing and Takeoff Sequences
Takeoff and landing are among the most critical phases of any flight, requiring precise control and a high degree of attention to detail. Dispensational flight modes dedicate specific sequences to these operations. The “Takeoff” dispensation might involve a controlled vertical ascent, automated pre-flight checks confirmation, and a gradual transition to forward flight. Similarly, the “Landing” dispensation focuses solely on a safe, controlled descent and touchdown, often engaging specific landing gear deployment protocols and precise altitude and velocity control. This dedicated focus minimizes the risk of accidents during these vulnerable moments.
Emergency Protocols as Distinct Dispensations
Emergency situations, such as engine failure, critical system malfunctions, or unexpected loss of GPS signal, are handled through highly specialized, often pre-programmed, emergency dispensations. These are designed for rapid activation and prioritize survival and safety above all else. Examples include an “Autorotation Landing” (for rotorcraft) or a “Ballistic Parachute Deployment” (for fixed-wing aircraft with such systems). These are not modes that are ever encountered in routine operations but are critical safety nets when standard dispensations fail.
Optimizing Resource Allocation and Mission Performance
Beyond safety, dispensational control significantly enhances mission performance by ensuring that the drone’s computational power, battery life, and sensor capabilities are used optimally for each stage of the operation.
Power Management Across Flight Phases
Energy efficiency is a paramount concern for any battery-powered UAV. Different flight phases have vastly different energy demands. The “Transit” dispensation can be programmed for maximum efficiency, utilizing aerodynamic cruise speeds and minimizing the power draw of non-essential systems. In contrast, the “High-Maneuver” or “Sensor-Intensive” dispensations, required for close-quarters observation or rapid evasive actions, will naturally consume more power. By explicitly defining these energy-intensive and energy-saving dispensations, sophisticated power management algorithms can be implemented, extending flight endurance and mission scope.

Prioritization of Sensor Utilization
Different missions require different sensor payloads and data processing priorities. For instance, a mapping mission will prioritize high-resolution aerial imagery and photogrammetry processing, while a search-and-rescue mission might prioritize thermal imaging and acoustic sensors for locating survivors. Dispensational flight modes allow for the dynamic activation and deactivation of sensor suites and their associated processing pipelines. This ensures that the drone is not expending computational resources on unnecessary sensor data, thereby improving efficiency and data quality. For example, during “Transit,” passive sensors might be minimally active, conserving power, while during “Target Identification,” multiple high-bandwidth sensors might be fully engaged.
In conclusion, the concept of dispensational flight modes, when applied to advanced drone technology, represents a sophisticated approach to managing complex aerial systems. By segmenting operations into distinct, contextually aware, and purpose-built phases, drones can achieve new levels of safety, efficiency, and operational capability. This framework allows for intelligent adaptation to dynamic environments and optimizes the use of onboard resources, pushing the boundaries of what autonomous flight can achieve.