The Foundation of 3D Spatial Understanding
A point cloud is a fundamental concept in the realm of 3D data acquisition and processing, representing a collection of data points in a three-dimensional coordinate system. Each point within this cloud possesses X, Y, and Z coordinates, defining its precise location in space. However, the true power of a point cloud extends beyond mere spatial coordinates. Depending on the technology used for its creation, each point can also be enriched with additional attributes such as color (RGB values), intensity (reflectivity), classification information (e.g., ground, vegetation, building), and even normal vectors, which indicate the orientation of the surface at that point.
The creation of point clouds is typically achieved through various sensing technologies, most notably LiDAR (Light Detection and Ranging) and photogrammetry. LiDAR systems emit laser pulses and measure the time it takes for them to return after reflecting off surfaces. By calculating the distance based on the speed of light and the round-trip time, and knowing the sensor’s precise position and orientation, a dense collection of 3D points representing the scanned environment is generated. Photogrammetry, on the other hand, uses multiple overlapping photographs taken from different viewpoints. Sophisticated algorithms then analyze these images to identify common features and triangulate their positions in 3D space, effectively reconstructing the scene as a point cloud.
The resulting point cloud, regardless of its origin, serves as a raw, unorganized, but incredibly rich dataset that forms the bedrock for numerous applications. It’s akin to a digital fingerprint of a physical space, capturing its geometry and often its appearance. This digital representation allows for detailed analysis, measurement, visualization, and manipulation of real-world objects and environments in a way that was previously impossible. The ability to generate and work with point clouds has revolutionized fields ranging from surveying and architecture to engineering, cultural heritage preservation, and even the development of autonomous systems.
Generating Point Clouds: The Technology Behind the Data
The accurate and efficient generation of point clouds is dependent on the sophisticated technologies employed in their acquisition. While the fundamental principle remains capturing spatial data, the methods and their resulting characteristics can vary significantly. Understanding these technologies is key to appreciating the nuances and capabilities of point cloud data.
LiDAR: Precision Through Laser Pulses
LiDAR is a remote sensing technology that has become synonymous with high-accuracy point cloud generation. At its core, LiDAR operates by emitting laser beams and measuring the time it takes for these beams to reflect off objects and return to the sensor.
How LiDAR Works
The process begins with the LiDAR sensor emitting a pulsed laser beam. This beam travels at the speed of light. Upon striking an object – be it a building facade, a tree canopy, or the ground – a portion of the laser energy is reflected back towards the sensor. The sensor’s internal clock precisely records the time elapsed from emission to reception. Knowing the speed of light, the distance to the object can be calculated using the formula: Distance = (Speed of Light * Time of Flight) / 2.
To create a 3D point cloud, the LiDAR sensor is typically mounted on a moving platform, such as a terrestrial scanner, an aircraft, or a drone. This platform is equipped with precise positioning systems (like GNSS/IMU – Global Navigation Satellite System/Inertial Measurement Unit) that record the exact location and orientation of the sensor at the moment each laser pulse is fired. By combining the calculated distance of each returning pulse with the sensor’s position and orientation, the X, Y, and Z coordinates of the reflecting surface point can be determined.
Types of LiDAR and Their Outputs
There are several types of LiDAR systems, each suited for different applications and producing point clouds with varying characteristics:
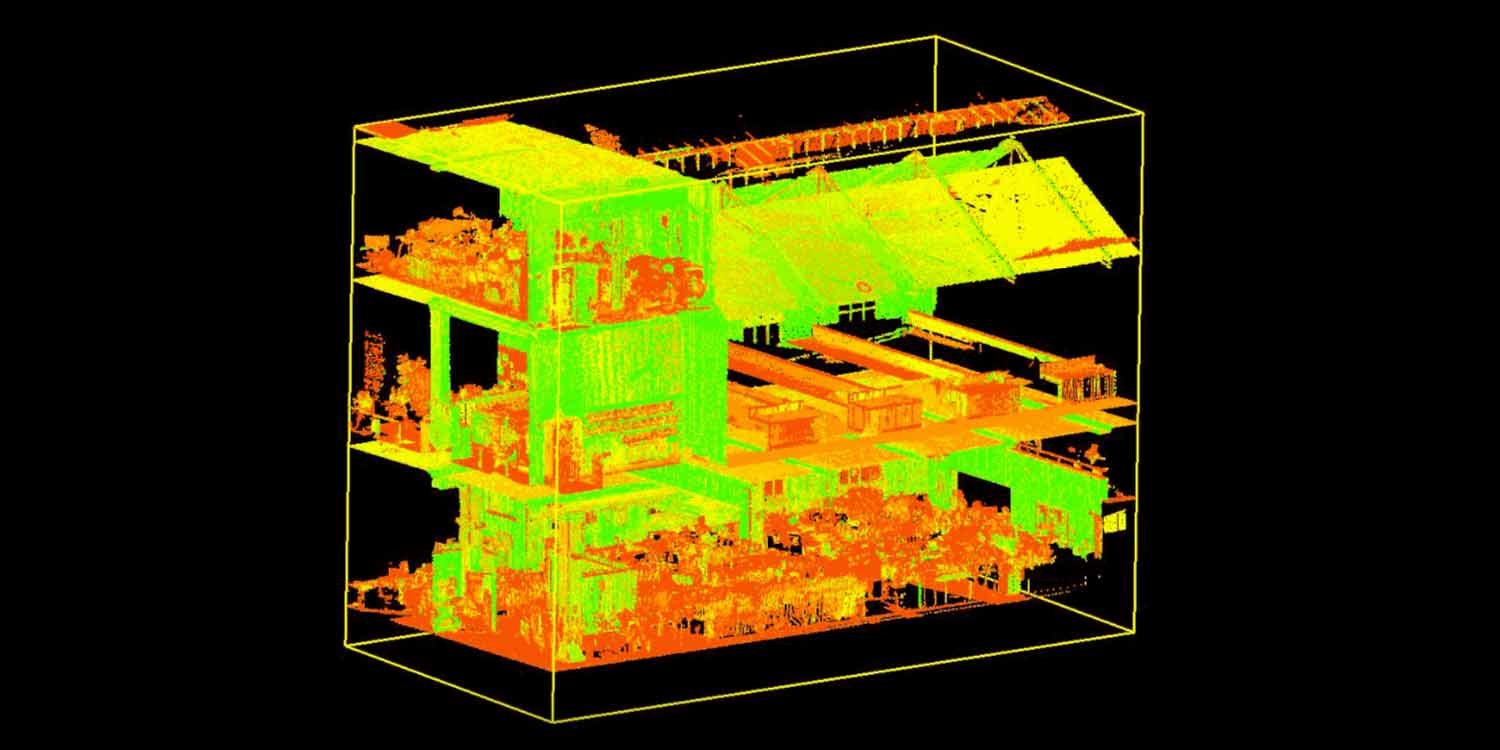
- Terrestrial LiDAR (TLS): These scanners are ground-based and are typically mounted on tripods. They are known for their extremely high accuracy and detail, making them ideal for surveying buildings, industrial sites, and archaeological ruins. TLS point clouds are often very dense, capturing intricate surface details.
- Mobile LiDAR (MLS): Mounted on vehicles, MLS systems capture point clouds as the vehicle moves. This allows for rapid data acquisition over large areas, such as roads, railways, and urban environments. The accuracy can be slightly lower than TLS due to the dynamic nature of the platform, but the speed and coverage are significant advantages.
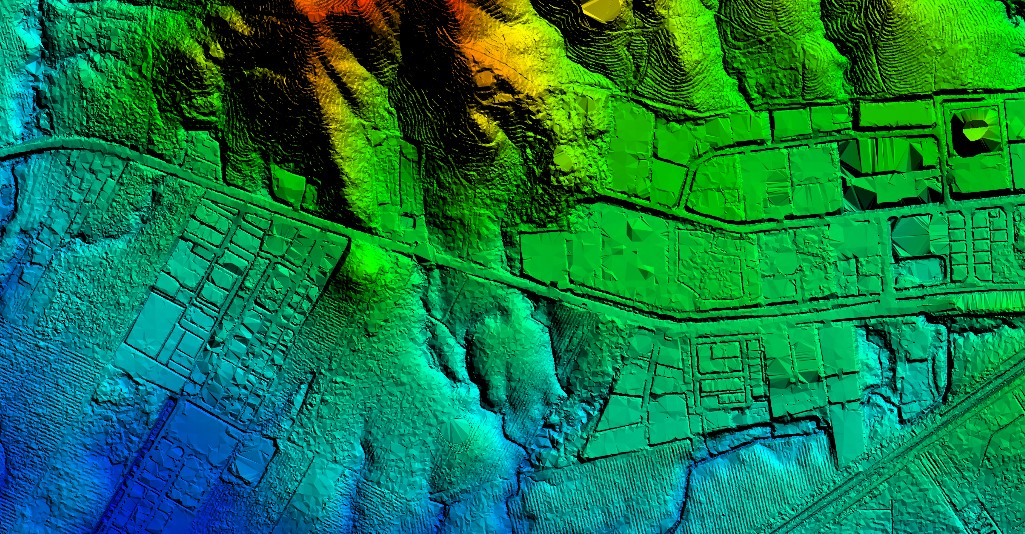
- Aerial LiDAR (ALS): Deployed on aircraft (planes or helicopters), ALS is used for large-scale mapping of terrain, forestry, and infrastructure. ALS point clouds are crucial for creating Digital Elevation Models (DEMs) and Digital Surface Models (DSMs). They can penetrate vegetation to some extent, allowing for the mapping of the ground surface beneath the canopy.
- UAV-mounted LiDAR: Drones equipped with LiDAR offer a flexible and cost-effective solution for acquiring high-resolution point clouds for smaller to medium-sized areas. They provide access to difficult-to-reach locations and can achieve very detailed scans, bridging the gap between TLS and ALS in terms of resolution and accessibility.
A key characteristic of LiDAR-generated point clouds is the intensity value associated with each point. This value represents the strength of the returned laser signal, which is influenced by the reflectivity of the surface material. Intensity data can be used for classification purposes, helping to differentiate between different surface types (e.g., asphalt vs. grass) and can sometimes be visualized to create grayscale images of the scanned environment.
Photogrammetry: Reconstruction from Images
Photogrammetry is another powerful technique for generating 3D point clouds, leveraging the power of digital photography. Instead of lasers, it uses overlapping images captured from multiple perspectives.
The Photogrammetry Workflow
The photogrammetry process begins with capturing a series of overlapping photographs of an object or environment. The overlap is crucial, as it ensures that each point of interest is visible in at least two, and ideally more, images. This set of images is then processed using specialized software.
The software first identifies common features or “tie points” across the overlapping images. By analyzing the position and scale of these tie points in multiple images, the software can triangulate their 3D coordinates. This initial process, known as Structure from Motion (SfM), reconstructs the camera positions and orientations for each photo and generates a sparse point cloud.
Following SfM, a dense matching algorithm is employed to generate a much denser point cloud. This algorithm analyzes the pixel-level similarities between images to infer depth information for a far greater number of points. The result is a detailed 3D representation of the scene.
Advantages and Limitations of Photogrammetry
Photogrammetry offers several distinct advantages. One of the most significant is the ability to capture color information (RGB) directly from the photographs. This results in highly realistic and visually appealing point clouds, where each point is colorized according to its appearance in the real world. This is invaluable for applications where visual fidelity is important, such as cultural heritage documentation or architectural visualization.
Furthermore, the hardware required for photogrammetry can be more accessible and less expensive than high-end LiDAR systems. Standard cameras, including those found on drones, can be used effectively.
However, photogrammetry does have its limitations. Its accuracy is highly dependent on image quality, lighting conditions, and the texture of the subject. Featureless or highly reflective surfaces can pose challenges for the matching algorithms. Unlike LiDAR, photogrammetry cannot inherently measure absolute distances without ground control points (GCPs) for georeferencing and scale calibration. The “point cloud” generated is essentially a visual reconstruction, and its geometric accuracy is derived from the geometric accuracy of the captured images and the processing techniques.
Point Cloud Data Processing and Applications
Once a point cloud has been generated, its raw form is often just the starting point. The true value of point cloud data is unlocked through subsequent processing and analysis, enabling a wide array of applications across diverse industries.
Cleaning, Registration, and Georeferencing
Raw point clouds, particularly those generated from multiple scans or from different sensors, often require significant post-processing to become usable.
Registration: Stitching Scans Together
When a large area or complex object is scanned, it’s common to perform multiple individual scans from different positions. Registration is the process of aligning and merging these individual scans into a single, coherent point cloud. This is typically achieved by identifying common overlapping areas between scans and then applying transformation algorithms (e.g., rigid body transformations) to bring them into a unified coordinate system. Without accurate registration, the resulting point cloud would be fragmented and inaccurate.
Georeferencing: Anchoring to Real-World Coordinates
For many applications, it is essential that the point cloud is accurately positioned within a real-world coordinate system (e.g., UTM, State Plane). Georeferencing involves tying the point cloud to known geographic coordinates. This is often achieved using data from GNSS receivers that were active during the scan acquisition. For terrestrial scans, surveyed control points with known coordinates can be used. This step ensures that measurements taken from the point cloud are spatially accurate and can be integrated with other geospatial data.
Noise Reduction and Filtering
Point clouds are often susceptible to noise, which can manifest as spurious points or unwanted data (e.g., points from passing vehicles, birds, or sensor errors). Noise reduction techniques, such as statistical outlier removal or radius-based filtering, are applied to clean up the data and remove these erroneous points, leading to a more accurate representation of the target environment.
Feature Extraction and Analysis
The processed point cloud becomes a rich source for extracting meaningful information. This involves identifying and analyzing specific geometric features.
Classification: Understanding What’s What
One of the most critical processing steps is classification. This involves assigning each point in the cloud to a specific category based on its geometric properties or other attributes (like intensity or color). Common classification categories include:
- Ground: Points representing the bare earth.
- Vegetation: Points belonging to trees, shrubs, and other plants.
- Buildings: Points forming the structures of buildings.
- Water: Points representing water bodies.
- Man-made objects: Including roads, power lines, and vehicles.
Classification can be performed manually, semi-automatically, or fully automatically using algorithms, often enhanced by machine learning and artificial intelligence. Once classified, the data can be filtered to isolate specific classes, for example, to create a bare-earth terrain model by only keeping ground points.
Measurement and Modeling
With a clean, classified, and georeferenced point cloud, precise measurements of distances, angles, areas, and volumes can be taken directly from the 3D data. This eliminates the need for physical site visits for every measurement. Beyond simple measurements, point clouds serve as the foundation for creating various types of 3D models. These can include:
- TIN (Triangulated Irregular Network) Models: Representing surfaces using interconnected triangles.
- BIM (Building Information Modeling) Models: Creating detailed digital representations of buildings with associated information.
- Mesh Models: Generating a surface representation composed of polygons, often used for visualization and simulation.
Diverse Applications
The ability to capture, process, and analyze 3D spatial data via point clouds has led to transformative applications across numerous sectors.
Surveying and Mapping
Point clouds from LiDAR and photogrammetry have revolutionized traditional surveying. They allow for the rapid and accurate creation of topographic maps, Digital Elevation Models (DEMs), and Digital Surface Models (DSMs). This is crucial for land development, infrastructure planning, and environmental monitoring.
Architecture, Engineering, and Construction (AEC)
In AEC, point clouds are used for:
- As-built modeling: Capturing the precise existing conditions of a structure for renovation or expansion projects.
- Progress monitoring: Tracking construction progress by comparing point clouds captured at different stages.
- Quality control: Verifying that constructed elements conform to design specifications.
- Facility management: Creating detailed digital twins of buildings for ongoing maintenance and operations.
Cultural Heritage Preservation
Point clouds enable the meticulous documentation of historical sites, artifacts, and monuments. This 3D data can be used for virtual reconstructions, condition assessments, and to create detailed records for preservation efforts, especially in cases of damage or loss due to natural disasters or conflict.
Autonomous Systems and Robotics
Point clouds are a vital input for the perception systems of autonomous vehicles, robots, and drones. They provide a detailed understanding of the surrounding environment, allowing these systems to navigate, detect obstacles, and plan paths safely and effectively. Applications include self-driving cars, automated warehouse robots, and drones used for inspection and delivery.

Forensics and Accident Reconstruction
The detailed spatial information contained within point clouds is invaluable for forensic investigations and accident reconstruction. They allow investigators to create precise 3D models of crime scenes or accident sites, aiding in the analysis of events and the determination of causality.
In essence, a point cloud is far more than just a collection of dots; it is a powerful and versatile data structure that forms the foundation of modern 3D spatial understanding, driving innovation and efficiency across a vast spectrum of technological and scientific endeavors.