In the dynamic world of drone technology, understanding the underlying principles that govern performance is crucial for enthusiasts, professionals, and manufacturers alike. While terms like “speed,” “endurance,” and “range” are commonly discussed, the mathematical models that describe these phenomena often contain parameters that are less intuitive. One such parameter, often represented by the letter ‘b’, plays a significant role in exponential growth models applied to various aspects of drone operation. This article delves into the meaning, implications, and practical applications of the ‘b’ parameter in the context of drone performance, focusing on how it shapes and predicts exponential growth in key metrics.
The Foundation of Exponential Growth in Drone Metrics
Exponential growth is a phenomenon where a quantity increases at a rate proportional to its current value. In the context of drones, this can manifest in various ways, from the rate of battery depletion under certain flight conditions to the accumulation of data during a mapping mission. Understanding these growth patterns allows for better prediction, optimization, and ultimately, enhanced drone capabilities.
Understanding the Exponential Growth Model
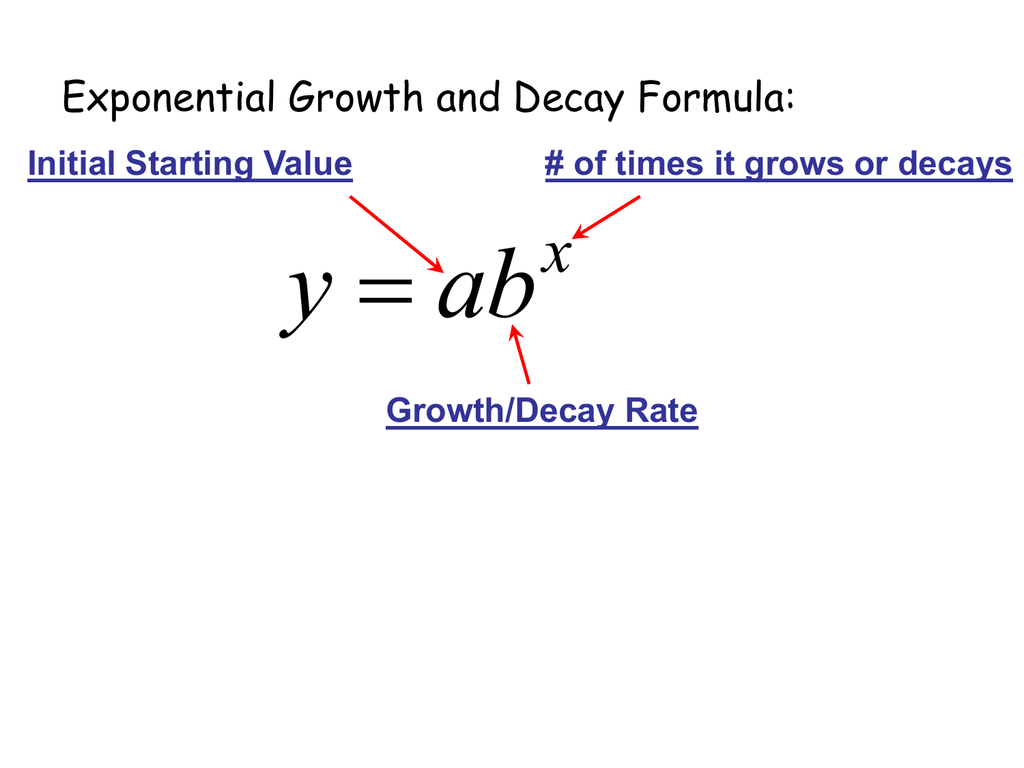
At its core, exponential growth is described by the formula:
$N(t) = N_0 * e^(rt)$
Where:
- $N(t)$ is the quantity at time $t$.
- $N_0$ is the initial quantity.
- $e$ is the base of the natural logarithm (approximately 2.71828).
- $r$ is the growth rate.
- $t$ is time.
However, more complex models are often employed to capture nuances specific to drone operations. A common variation, particularly when dealing with decay or saturation, might look like:
$N(t) = A * (1 – e^(-bt))$
or
$N(t) = A * e^(bt)$
In these formulations, ‘b’ is a parameter that dictates the rate at which the growth approaches its asymptotic limit or the speed at which it increases. It’s not the growth rate itself (that’s often related to ‘r’ or is incorporated within ‘b’), but rather a factor that influences how quickly that exponential change occurs.
The Role of ‘b’ as a Scaling Factor for Exponential Change
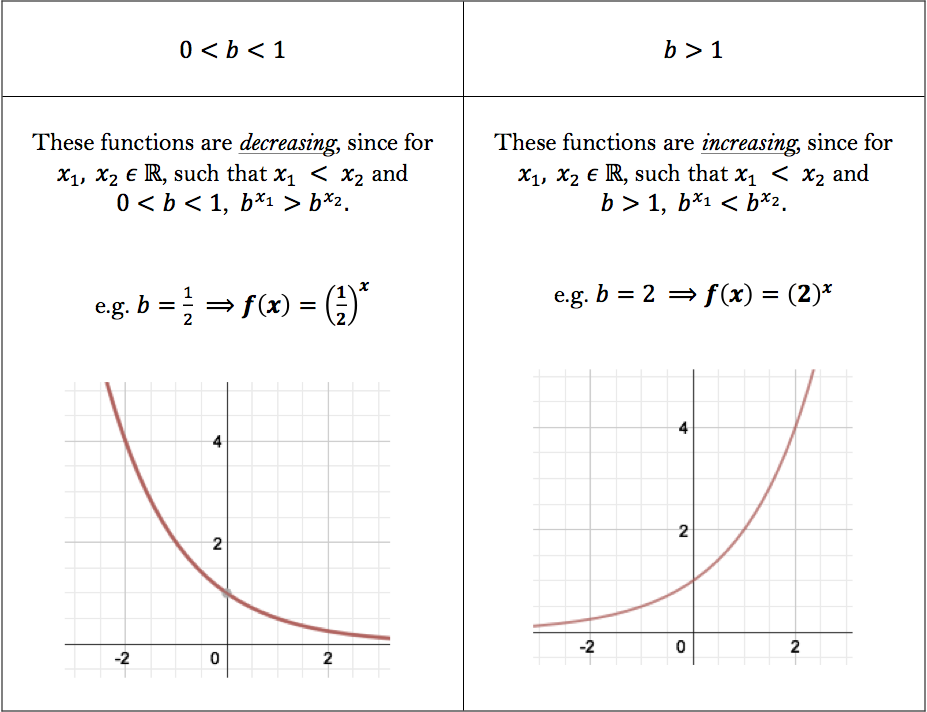
The ‘b’ parameter essentially acts as a scaling factor for the exponent. A larger ‘b’ value signifies a faster rate of exponential growth or decay, meaning the quantity in question will reach its maximum or minimum value more rapidly. Conversely, a smaller ‘b’ indicates a slower, more gradual exponential progression.
Consider the function $y = e^(bx)$. If $b$ is large (e.g., $b=5$), the function grows very rapidly. If $b$ is small (e.g., $b=0.1$), the function grows much more slowly. This simple illustration underscores the fundamental role of ‘b’ in shaping the steepness of the exponential curve.
Practical Implications of ‘b’ in Drone Performance
The ‘b’ parameter, though abstract in its mathematical representation, has tangible implications for how we design, operate, and interpret drone performance. It influences everything from the efficiency of battery usage to the speed of data processing and the effectiveness of certain autonomous flight algorithms. By understanding and potentially manipulating ‘b’, we can unlock new levels of drone capability and reliability.
‘b’ in Battery Depletion and Flight Endurance
One of the most critical aspects of drone operation is battery life. The rate at which a battery depletes is often influenced by a complex interplay of factors, and in simplified models, exponential decay can be used to approximate certain aspects of this process. While direct exponential decay of battery capacity isn’t typically how we model it (capacity is finite), the rate of power consumption under varying conditions can exhibit exponential characteristics, and ‘b’ would define how quickly that consumption scales.
Modeling Power Draw and Flight Time
When a drone is subjected to increased load – for instance, flying into a strong headwind, performing aggressive maneuvers, or carrying an additional payload – its power draw increases significantly. In some scenarios, this increase in power draw might not be linear but rather exhibit a dependency that, when integrated over time, contributes to an effectively faster rate of battery depletion.
If we were to model the effective rate of battery capacity decrease as a function of some operational parameter ‘x’ (e.g., wind speed, maneuver intensity), the relationship might be expressed in an exponential form. In such a model, ‘b’ would dictate how rapidly the battery’s usable capacity diminishes as ‘x’ increases.
For example, a model for remaining battery capacity could be framed as:
$C(t) = C0 – int0^t P(tau) dtau$
Where $P(tau)$ is the power draw at time $tau$. If the power draw itself is a function of operational intensity that leads to exponential scaling of energy consumption, then ‘b’ would be a key parameter in that scaling. A high ‘b’ would mean that even slight increases in operational intensity lead to a disproportionately rapid decrease in flight endurance.
Impact of Flight Conditions on ‘b’
The environment in which a drone operates has a profound impact on its energy consumption. Factors such as:
- Air Density: Lower air density at higher altitudes requires more power for lift and propulsion.
- Wind Speed and Turbulence: Battling headwinds or turbulent air significantly increases motor load and thus power draw.
- Temperature: Extreme temperatures can affect battery performance, leading to reduced efficiency and faster discharge rates.
- Flight Maneuvers: Aggressive acceleration, deceleration, and sharp turns demand more power than steady, controlled flight.
In a sophisticated model predicting flight endurance, ‘b’ could be a dynamic parameter that changes based on these environmental conditions. For instance, ‘b’ might increase substantially in turbulent conditions, signifying a much faster effective “depletion rate” due to increased demand on the propulsion system. Manufacturers and flight control systems aim to manage these factors, implicitly or explicitly accounting for the ‘b’ parameter to optimize flight time and provide accurate remaining flight time estimations.
Optimizing for Endurance: Understanding the Trade-offs with ‘b’
For drone operators, understanding the implications of ‘b’ translates into strategic decision-making. If ‘b’ is high for a particular operational profile, it means the drone is highly sensitive to factors that increase power draw. This might necessitate:

- Shorter Mission Durations: To avoid running out of power unexpectedly.
- Conservative Flight Planning: Avoiding areas with high wind or turbulence where possible.
- Payload Management: Reducing the weight of the payload to minimize strain on the motors.
- Battery Management: Ensuring batteries are in optimal condition and at appropriate temperatures.
Conversely, a drone designed for operations where ‘b’ is inherently low will exhibit more consistent and predictable flight times, even under moderate environmental stress. This highlights the importance of ‘b’ in the design phase, where engineers strive to minimize its influence on critical performance metrics.
‘b’ in Data Acquisition and Processing Rates
Beyond flight mechanics, exponential growth principles, and thus the ‘b’ parameter, are also relevant to how drones acquire and process data, particularly in applications like aerial mapping, surveying, and inspection. The rate at which data is collected and the efficiency of its subsequent processing can be modeled using exponential functions.
Sensor Data Volume and Exponential Accumulation
Drones equipped with high-resolution cameras, LiDAR scanners, or multispectral sensors can generate vast amounts of data. The total volume of data collected over time can exhibit exponential growth if the sensor’s data acquisition rate increases with certain operational parameters or simply accumulates rapidly during a continuous scan.
For instance, if a drone is performing a photogrammetry mission, the number of images captured per unit time might be constant, leading to linear data accumulation. However, if the drone is actively using on-board processing to analyze environmental features in real-time and adjust its scanning path to capture more detailed data in identified areas of interest, the data acquisition rate could effectively increase, leading to exponential growth in the total dataset size over the mission duration. In such a scenario, ‘b’ would quantify how quickly this exponential accumulation of data occurs. A higher ‘b’ means the dataset grows much faster, requiring more robust storage and processing capabilities.
On-board Processing Speed and Algorithmic Efficiency
Modern drones are increasingly incorporating sophisticated on-board processing capabilities, leveraging AI and machine learning for tasks like object recognition, obstacle avoidance, and autonomous navigation. The efficiency of these algorithms, and the speed at which they can process incoming sensor data, can also be described using exponential growth or saturation models.
Consider an object detection algorithm. As it processes more frames of video, its confidence in identifying an object might increase exponentially towards a maximum probability. Alternatively, the rate at which it can process frames might be limited by computational resources, but the effectiveness of its learning or adaptation could grow exponentially in its early stages.
In these contexts, ‘b’ would represent the speed of convergence or the rate of improvement. A higher ‘b’ might indicate a highly efficient learning algorithm that quickly masters a task or an exceptionally fast processing pipeline that can handle a high throughput of data. Conversely, a low ‘b’ might signify a slower, more deliberate learning process or a processing system that requires more time to achieve optimal results.
Impact on Mission Planning and Resource Allocation
The ‘b’ parameter in data acquisition and processing directly impacts mission planning and the allocation of computational resources.
- Storage Requirements: A high ‘b’ in data accumulation necessitates larger on-board storage or a robust real-time data offload strategy.
- Processing Power: Faster data processing convergence (higher ‘b’) may allow for simpler or less powerful on-board computers, or it could enable more complex real-time analyses.
- Mission Duration: If processing is a bottleneck, a high ‘b’ might limit the effective duration of a data acquisition mission as the system struggles to keep up.
Understanding the ‘b’ value associated with a specific sensor payload and processing suite allows for more accurate forecasting of mission completion times, data management needs, and the required computational infrastructure, whether on the drone itself or for post-mission analysis.
‘b’ in Autonomous Systems and Learning Capabilities
The increasing sophistication of autonomous flight and the integration of AI in drone operations bring ‘b’ to the forefront in modeling learning and adaptation. The ability of a drone to learn from its environment and improve its performance over time is often characterized by exponential progress.
Learning Curves and Algorithmic Improvement
In machine learning applied to drone control, the performance of an algorithm often follows a learning curve. Initially, the algorithm might perform poorly, but as it is exposed to more data and experiences, its accuracy and efficiency improve. This improvement can be modeled as exponential growth.
For example, the error rate of a navigation algorithm might decrease exponentially as it accumulates flight data and refines its understanding of its operational environment. The equation could be something like:
$Error(t) = E{min} + (E0 – E_{min}) * e^(-bt)$
Here, ‘b’ quantifies how quickly the error rate approaches its minimum achievable value ($E_{min}$). A high ‘b’ indicates rapid learning and a fast convergence to optimal performance. This is crucial for tasks like precise waypoint navigation, automated landing, or sophisticated formation flying.
Adaptation to Dynamic Environments
Drones operating in complex and unpredictable environments, such as urban landscapes or disaster zones, need to adapt rapidly to changing conditions. Autonomous systems employ various sensing and control strategies to achieve this. The effectiveness and speed of this adaptation can be influenced by the ‘b’ parameter.
If a drone’s obstacle avoidance system learns to better predict the movement of dynamic obstacles, its ability to avoid collisions could improve exponentially over time. The ‘b’ parameter in this context would represent the rate of learning and adaptation. A high ‘b’ means the drone becomes proficient at navigating a dynamic environment very quickly, reducing the risk of accidents and enabling more efficient operation in challenging scenarios.
The Role of ‘b’ in Human-Drone Interaction and Training
The ‘b’ parameter also has relevance in how humans interact with and train autonomous drone systems. For operators who are learning to fly complex drones or use advanced software interfaces, their proficiency might also exhibit exponential growth. The ‘b’ parameter could characterize the steepness of their learning curve, indicating how quickly they master new skills or become adept at operating the technology.
Furthermore, in developing intuitive user interfaces for drones, the goal is often to minimize the time it takes for a user to reach a high level of competence. The design of these interfaces can be influenced by an understanding of the ‘b’ parameter in human learning, aiming to create systems that facilitate rapid skill acquisition.
Conclusion: Harnessing the Power of ‘b’ for Advanced Drone Capabilities
The ‘b’ parameter, though a mathematical construct, is a critical determinant of how various drone performance metrics evolve over time. Whether it’s the rate of battery depletion, the speed of data acquisition, or the efficiency of autonomous learning, ‘b’ dictates the tempo of exponential change.
For drone manufacturers, a deep understanding of ‘b’ is essential for designing systems that offer predictable performance, enhanced efficiency, and robust reliability across diverse operational conditions. By optimizing parameters that influence ‘b’, engineers can create drones that fly longer, collect data more effectively, and navigate autonomously with greater precision.
For drone operators, recognizing the implications of ‘b’ empowers them to make informed decisions regarding mission planning, risk assessment, and resource management. It allows for a more nuanced understanding of why a drone might behave in a certain way under specific circumstances and how to best leverage its capabilities.
As drone technology continues to advance, the ability to model, predict, and control the influence of parameters like ‘b’ will be paramount. It is through this deeper mathematical and engineering insight that we unlock the full potential of unmanned aerial vehicles, pushing the boundaries of what is possible in aerial technology, imaging, and beyond. The seemingly abstract ‘b’ is, in essence, a key to unlocking more predictable, efficient, and capable drone operations.