Building your own drone from scratch is an exhilarating project that combines engineering, electronics, and a bit of creativity. Whether you’re into quadcopters, FPV racing, or aerial filmmaking, a DIY drone lets you customize everything to your needs. No need for expensive off-the-shelf models like the DJI Mini 4 Pro—you can create a UAV tailored for micro drones, racing drones, or even advanced setups with GPS and obstacle avoidance. This guide walks you through the process step by step, assuming basic soldering skills and tools like a screwdriver set, multimeter, and heat shrink tubing. Expect to spend $200–500 on parts, and you’ll have a functional quadcopter ready for the skies in a weekend.
Selecting and Sourcing Components
The foundation of any great drone starts with high-quality, compatible parts. Focus on lightweight materials for better flight times and agility. Here’s what you’ll need for a standard 250mm quadcopter frame size, ideal for beginners diving into FPV or freestyle flying.
Frame and Propulsion System
Choose a carbon fiber frame for durability and low weight—something like the QAV250 clone, which is 5mm thick and supports 5-inch props. Motors should be brushless, such as 2204 or 2207 models with 2300–2600KV ratings for 4S batteries. Pair them with Gemfan 5045 triblade propellers for efficient thrust. You’ll need four motors, one per arm.
Flight Electronics
The brain is the flight controller, like the F4 flight controller running Betaflight firmware. It integrates an MPU6000 gyro for stabilization and supports Blackbox logging. Electronic speed controllers (ESCs)—four 20–30A BLHeli_32 units—handle motor speed. Add a FrSky XM+ receiver for reliable radio control.
Power and Sensors
A 4S 1300–1500mAh LiPo battery provides 5–8 minutes of flight. Use a power distribution board (PDB) to split voltage. For smarts, include a BMP280 barometer for altitude hold and a PMW3901 optical flow sensor for low-altitude stability, mimicking pro features like obstacle avoidance.
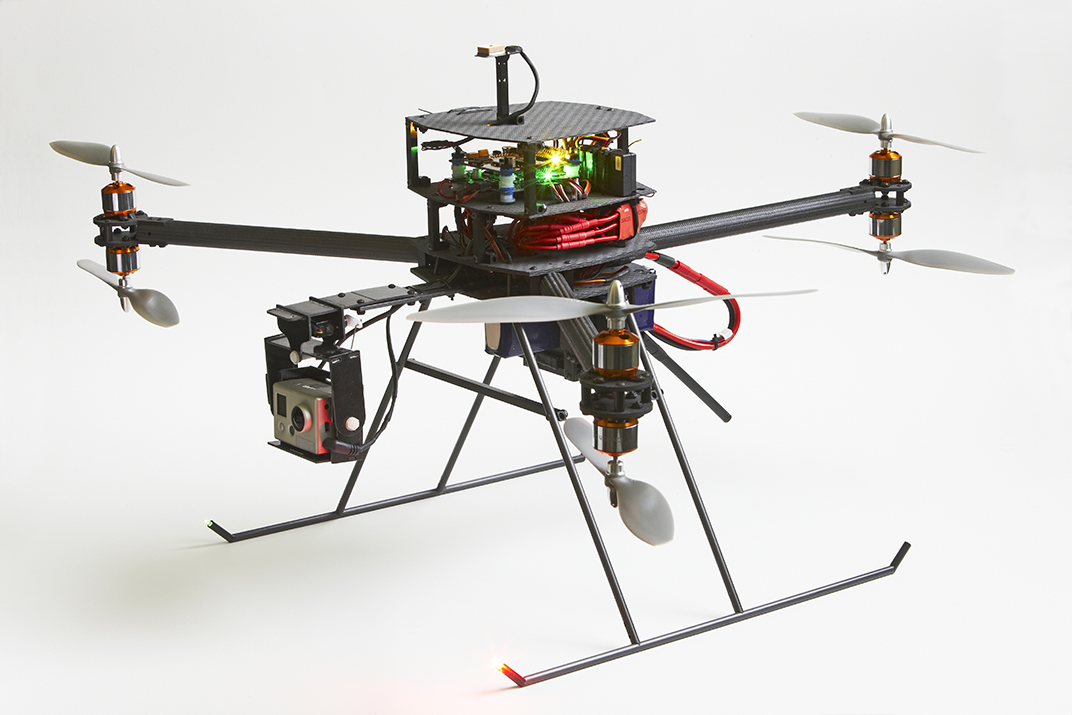
Camera and FPV Setup
For FPV systems, grab a Caddx Ratel CMOS camera with 1200TVL resolution and a 5.8GHz AKK transmitter. If you’re into imaging, mount a lightweight RunCam for 4K recording, stabilized by a simple 2-axis gimbal.
Source parts from hobby shops or online marketplaces specializing in drone accessories like batteries, controllers, and propellers. Always match KV ratings to prop size and battery voltage for balance.
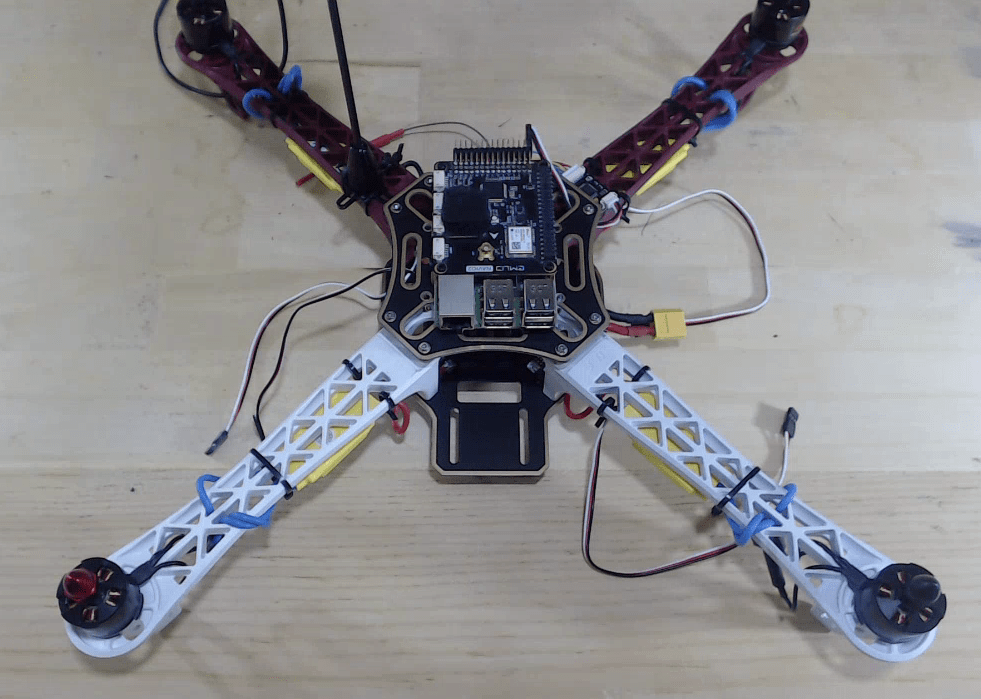
Assembling the Mechanical Structure
With parts in hand, start building the airframe. This step ensures a rigid base for all electronics.
Secure the frame arms to the main plate using M3 screws and nylon standoffs. Mount motors to each arm with X-pattern alignment—clockwise on front-left/rear-right, counterclockwise on others. Thread propeller adapters and secure props last, after electronics testing, using prop nuts.
Install the stack—flight controller atop ESCs on the frame’s center plate. Use double-sided tape or dampening balls to reduce vibrations, crucial for sensors like the gyro. Position the LiPo battery strap hooks on the bottom for easy attachment.
For FPV, angle the camera at 20–35 degrees for aggressive dives. Secure the VTX (video transmitter) away from the PDB to avoid interference. Add zip ties and heat shrink for cable management—neat wiring prevents shorts and improves airflow.
Weigh your build periodically; aim for under 400g without battery for nimble handling in racing drones.
Wiring and Soldering the Electronics
Electronics wiring is where precision matters—poor connections lead to crashes.
Solder ESCs to motors: red to positive, black to negative, signal wire to flight controller motor outputs (M1–M4). Follow Betaflight motor order: front-right M1, rear-right M2, rear-left M3, front-left M4.
Connect the PDB: battery leads to input, 5V BEC to flight controller VBAT/5V pads, ESC power to 12–16V pads. Wire the receiver to SBUS/RSSI on the FC. For sensors, solder the BMP280 to I2C pads and optical flow to UART.
Flash Betaflight Configurator via USB. Bind your FrSky transmitter, set modes (angle for stabilized flight, acro for manual), and calibrate ESCs—full throttle beep sequence confirms.
Power up without props: check motor spin directions (swap two wires if reversed), arm via throttle stick, and test RC inputs. Use the OSD (on-screen display) for battery voltage monitoring.
If adding GPS like a BN-220 module, wire to UART6 for return-to-home features. For cameras, connect video out to VTX and power from 9V BEC.
Safety first: discharge LiPo after use, use a current limiter during initial tests.
Software Configuration and Tuning
Firmware brings your drone to life. Download Betaflight or iNav for GPS modes.
In the configurator:
- Ports tab: Enable UARTs for receiver, GPS, and telemetry.
- Configuration tab: Quad X frame, 4S battery, airframe type.
- PID tab: Start with defaults; tune P/I/D gains post-maiden via Blackbox logs.
- Modes tab: Assign arm switch, assign angle/acro, failsafe to drop throttle.
- OSD tab: Customize with RSSI, flight time, current draw.
For advanced navigation, enable magnetometer calibration and RTH (return to home). Set stabilization systems like horizon mode for cinematic shots.
Update BLHeli firmware on ESCs via BLHeliSuite for smoother response. Test in a flight simulator like Liftoff first.
Testing, Troubleshooting, and First Flights
Bench test complete? Time for props. Balance them with a prop balancer to minimize vibes.
Ground test: arm, throttle up gradually, verify PID response—no wobbles. Maiden flight in an open field: start in angle mode, hover at 1–2m, check stability.
Common issues:
- Jello in FPV: Add gyro filtering or capacitor to camera.
- Overheating ESCs: Improve airflow, lower KV.
- Drift: Calibrate accelerometer on level surface.
Tune iteratively: aggressive PIDs for racing, softer for aerial filmmaking. Experiment with AI follow mode via companion computer like Raspberry Pi if ambitious.
Add-ons like thermal cameras or optical zoom expand uses for mapping or inspections. Join communities for tunes shared on apps.
Your custom drone now embodies tech & innovation—autonomous paths, creative angles await. Fly safe, respect regulations, and iterate. Happy building!
