In the realm of aviation, the term “stall” carries a profound and often misunderstood meaning. It’s a critical aerodynamic phenomenon that, when not properly managed, can lead to loss of control and potentially dangerous situations. While often associated with fixed-wing aircraft, the principles of a stall are equally relevant to rotary-wing aircraft like drones. Understanding what a stall is, why it occurs, and how it manifests in drone operations is paramount for safe and effective flight. This article delves into the aerodynamic intricacies of a stall, focusing specifically on its implications within the context of drone technology.
The Aerodynamics of Lift and Airflow
At its core, a stall is an aerodynamic event related to the generation of lift. Lift is the upward force that counteracts gravity, enabling an aircraft to fly. This force is primarily generated by the wings (or rotors in the case of drones) as air flows over their specially designed surfaces. The shape of an airfoil, typically curved on top and flatter on the bottom, causes air to travel a longer distance over the upper surface than the lower surface. This difference in distance, coupled with the principle of Bernoulli’s theorem, results in higher air velocity over the top of the airfoil, creating lower pressure. The pressure differential between the upper and lower surfaces generates the upward lift force.
Airflow and Angle of Attack
The relationship between the airfoil and the oncoming air is defined by the angle of attack (AoA). This is the angle between the chord line of the airfoil (an imaginary line connecting the leading and trailing edges) and the direction of the relative wind. A low AoA means the airfoil is nearly parallel to the airflow, resulting in minimal lift. As the AoA increases, the difference in air velocity and pressure across the airfoil becomes more pronounced, leading to a proportional increase in lift. This direct relationship holds true up to a certain point.
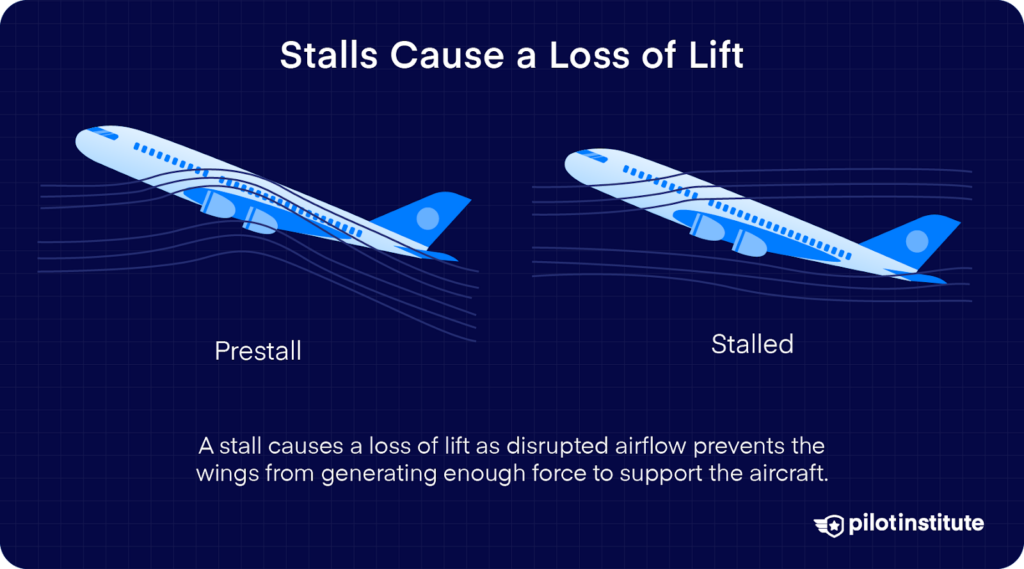
The Critical Angle of Attack
Every airfoil has a critical angle of attack. This is the specific AoA at which the airflow over the upper surface of the airfoil separates from the surface. Beyond this critical angle, the smooth, attached airflow breaks down into turbulent eddies. This separation disrupts the smooth flow of air, significantly reducing the pressure difference and, consequently, the amount of lift generated. When an airfoil exceeds its critical angle of attack, it enters a stall.
Factors Influencing Lift
Several factors influence the amount of lift an airfoil can generate, all of which play a role in understanding stalls:
- Airspeed: At a given AoA, lower airspeed means less air flowing over the airfoil, resulting in less lift. Conversely, higher airspeed generates more lift.
- Wing/Rotor Area: Larger wing or rotor surfaces can generate more lift at the same AoA and airspeed.
- Airfoil Shape: Different airfoil designs are optimized for various flight characteristics, affecting their stall behavior.
- Air Density: Denser air provides more molecules for the airfoil to interact with, leading to greater lift. This is why aircraft perform differently at high altitudes where air is less dense.
- Angle of Attack: As discussed, AoA is a primary driver of lift, but it’s also the direct cause of a stall when exceeded.
Manifestations of a Stall in Drones
While drones, particularly multi-rotor quadcopters, are inherently more stable than fixed-wing aircraft, they are not immune to aerodynamic principles, including the phenomenon of a stall. The way a stall manifests in a drone can differ due to its design, but the underlying aerodynamic cause remains the same: exceeding the critical angle of attack.
Rotational Aerodynamics and Brushless Motors
Drones utilize rotating blades, or rotors, to generate lift. These rotors are essentially airfoils spinning at high speeds. Each blade, as it rotates, interacts with the air at a specific angle of attack. The speed of rotation, the pitch of the blades, and the overall aerodynamic design of the rotor system are crucial for generating the necessary thrust to overcome gravity.
In a typical quadcopter, four brushless motors drive propellers. These motors provide precise control over the rotational speed of each rotor. By independently varying the speed of these rotors, the drone can control its altitude, pitch, roll, and yaw. However, this control is contingent on the rotors generating sufficient thrust, which in turn depends on the airflow over the blades.
Low-Speed and High-Load Situations
A stall in a drone typically occurs not in the same way as a fixed-wing aircraft suddenly dropping from the sky. Instead, it’s more likely to manifest as a loss of control or an inability to maintain altitude or a desired attitude, especially in demanding flight conditions.
- Low-Speed Maneuvers: While drones excel at hovering and low-speed flight, extreme maneuvers at very low speeds can push individual rotors into unfavorable aerodynamic conditions. If a rotor experiences a sudden increase in its angle of attack relative to the airflow, especially at low rotational speeds, the airflow can separate, reducing the thrust generated by that rotor.
- High Load Conditions: When a drone is subjected to significant external forces, such as strong gusts of wind or performing aggressive maneuvers that require rapid changes in thrust, the rotors are working harder. In such scenarios, if the demands placed on a rotor exceed its ability to generate sufficient thrust at its current angle of attack and rotational speed, it can lead to a stall-like condition for that rotor. This can result in a loss of stability and control.
- Blade Pitch and AoA: In fixed-pitch propellers common on many drones, the angle of attack is primarily determined by the drone’s forward speed and the rotational speed of the propeller. In variable-pitch rotors (less common on consumer drones but found on some professional UAVs), the pitch can be adjusted, directly influencing the AoA.
Recognizing the Symptoms
Recognizing the symptoms of a potential stall in a drone is crucial for pilots. These can include:
- Sudden Loss of Altitude: If one or more rotors are experiencing a stall, the drone may suddenly drop in altitude, even if the pilot is attempting to ascend or maintain position.
- Uncommanded Rotations or Tilts: A differential loss of thrust from one or more rotors can cause the drone to unexpectedly roll, pitch, or yaw.
- Sluggish or Unresponsive Controls: When a rotor is not performing optimally due to stalled airflow, the drone’s response to pilot inputs can become delayed or weak.
- Audible Changes: While not always present, sometimes changes in the sound of the motors or propellers can indicate unusual aerodynamic conditions.

Preventing and Recovering from Stalls
The good news is that for most consumer and prosumer drones, the sophisticated flight controllers and software are designed to prevent many stall scenarios from occurring or to mitigate their effects. However, understanding preventative measures and recovery techniques is still vital.
Flight Controller Algorithms
Modern drone flight controllers are equipped with advanced algorithms that constantly monitor flight parameters such as altitude, velocity, attitude, and individual motor speeds. These systems are designed to:
- Maintain Optimal Angles of Attack: The flight controller works to keep the rotors operating within their efficient AoA range. It adjusts motor speeds to compensate for external forces and maintain stable flight.
- Prevent Extreme Maneuvers: While drones are agile, the flight controller will often limit the maximum tilt angles or rates of change during aggressive maneuvers to prevent aerodynamic instability.
- Auto-Stabilization: In adverse conditions, the flight controller will automatically make rapid adjustments to motor speeds to maintain stability, effectively preventing a full stall.
Pilot Best Practices
Even with advanced technology, pilot input and understanding play a significant role in preventing stalls:
- Smooth and Gradual Inputs: Avoid sudden, drastic stick movements, especially during low-speed flight or when encountering turbulence. Gradual inputs allow the flight controller and rotors to respond effectively.
- Respect Wind Conditions: Be aware of wind speed and direction. Strong gusts can easily push a drone into conditions where rotors may struggle to maintain sufficient thrust. Fly within the drone’s operational wind limits.
- Monitor Battery Levels: Low battery voltage can lead to reduced motor power, making it harder for the drone to maintain sufficient rotor speed and thus increasing the risk of aerodynamic instability.
- Avoid Extreme Altitudes: Flying at very high altitudes where air density is low can reduce the effectiveness of the rotors, making them more susceptible to stall-like conditions.
- Understand Drone Limitations: Each drone has its own performance envelope. Familiarize yourself with its capabilities and limitations, especially regarding wind resistance and maneuverability.
Recovery Techniques
If a drone does enter a stall-like condition, quick and correct action can often lead to recovery:
- Reduce AoA: The primary goal of recovery is to reduce the angle of attack on the affected rotors. This is typically achieved by:
- Reducing Collective Pitch (if applicable): For drones with variable-pitch rotors, reducing the pitch angle directly lowers the AoA.
- Reducing Forward Speed: If the stall is related to forward flight, reducing speed can help re-establish attached airflow.
- Lowering Altitude (with caution): In some situations, descending slightly can increase airspeed relative to the rotor disc, aiding recovery, but this must be done cautiously to avoid a hard landing.
- Correcting Uncommanded Movements: If the drone is rolling or pitching unexpectedly, the pilot needs to use the appropriate control input to counter the unwanted movement and level the aircraft.
- Trust the Flight Controller: In many cases, the flight controller will attempt to self-correct. Pilots should allow the system to work and only intervene with precise, controlled inputs.
- Land Safely: If recovery is uncertain or the drone remains unstable, the best course of action is often to find the nearest safe landing spot and land the drone as gently as possible.
Implications for Drone Design and Future Development
The understanding of aerodynamic stalls, even in the context of multi-rotor aircraft, has significant implications for drone design and the ongoing evolution of flight technology. As drones become more sophisticated and are tasked with increasingly complex missions, their aerodynamic efficiency and stability in a wider range of conditions become paramount.
Rotor Design and Optimization
The shape and design of drone rotors are continuously being refined to maximize lift generation and efficiency while minimizing the risk of airflow separation. This involves:
- Advanced Airfoil Shapes: Researchers are exploring new airfoil profiles that are more resistant to stall, especially at higher angles of attack.
- Variable Pitch Systems: While more complex, the integration of variable pitch rotors in more drone designs could offer greater control and the ability to actively manage AoA, further mitigating stall risks.
- Blade Flexibility and Taper: The way blades are designed to flex and taper along their length can also influence airflow and stall characteristics.
Flight Control System Advancements
Flight controller software and hardware are at the forefront of drone safety and performance. Future advancements will likely focus on:
- Predictive Stall Detection: Developing more sophisticated sensors and algorithms that can predict an impending stall based on real-time flight data and environmental conditions, allowing for proactive intervention.
- Enhanced Auto-Recovery: Improving the ability of flight controllers to autonomously recover from stall-like situations with greater precision and speed.
- Adaptive Control Systems: Implementing control systems that can dynamically adapt to changing aerodynamic conditions and maintain optimal performance across a wider range of flight envelopes.

Expanding the Flight Envelope
A deeper understanding and mitigation of stall phenomena will enable drones to operate more reliably and effectively in challenging environments. This includes:
- Improved High-Wind Performance: Drones will be better equipped to handle turbulent and gusty conditions without compromising stability.
- Enhanced Agility and Maneuverability: While safety is paramount, the ability to perform more aggressive maneuvers without encountering aerodynamic instability will open up new possibilities for applications like racing and advanced cinematography.
- Longer Endurance and Efficiency: By optimizing rotor performance and reducing the likelihood of inefficient aerodynamic states, drones can potentially achieve longer flight times and improved energy efficiency.
In conclusion, while the term “stall” might evoke images of traditional aircraft, its underlying principles are fundamental to understanding the flight dynamics of drones. By comprehending the aerodynamics of lift, the critical angle of attack, and how these factors manifest in rotorcraft, pilots and designers can ensure safer, more reliable, and more capable drone operations. The continuous advancements in flight control technology and rotor design are steadily pushing the boundaries, making drones more robust and versatile than ever before.