In the rapidly evolving landscape of unmanned aerial vehicles (UAVs) and autonomous systems, the sophistication of hardware often garners the most headlines. We marvel at carbon fiber frames, high-torque brushless motors, and multi-spectral sensors. However, the true intelligence of these machines resides in the firmware—the complex lines of code that translate physical phenomena into digital logic. At the heart of this logic lies a fundamental data type known as the “unsigned int” (unsigned integer).
To the uninitiated, “unsigned int” might sound like a minor detail of computer science. Yet, in the realms of Tech & Innovation, particularly regarding AI follow modes, autonomous navigation, and remote sensing, this specific way of handling numbers is a cornerstone of efficiency and safety. Understanding what an unsigned int is and how it functions within the drone ecosystem is essential for anyone looking to grasp how modern aerial robotics process the world around them.
The Core Logic of Embedded Systems in Drone Technology
At its simplest level, every decision a drone makes—from stabilizing its pitch in high winds to identifying a target via machine learning—is the result of mathematical operations. These operations rely on variables, and variables require defined data types.
Defining the Unsigned Integer in Programming
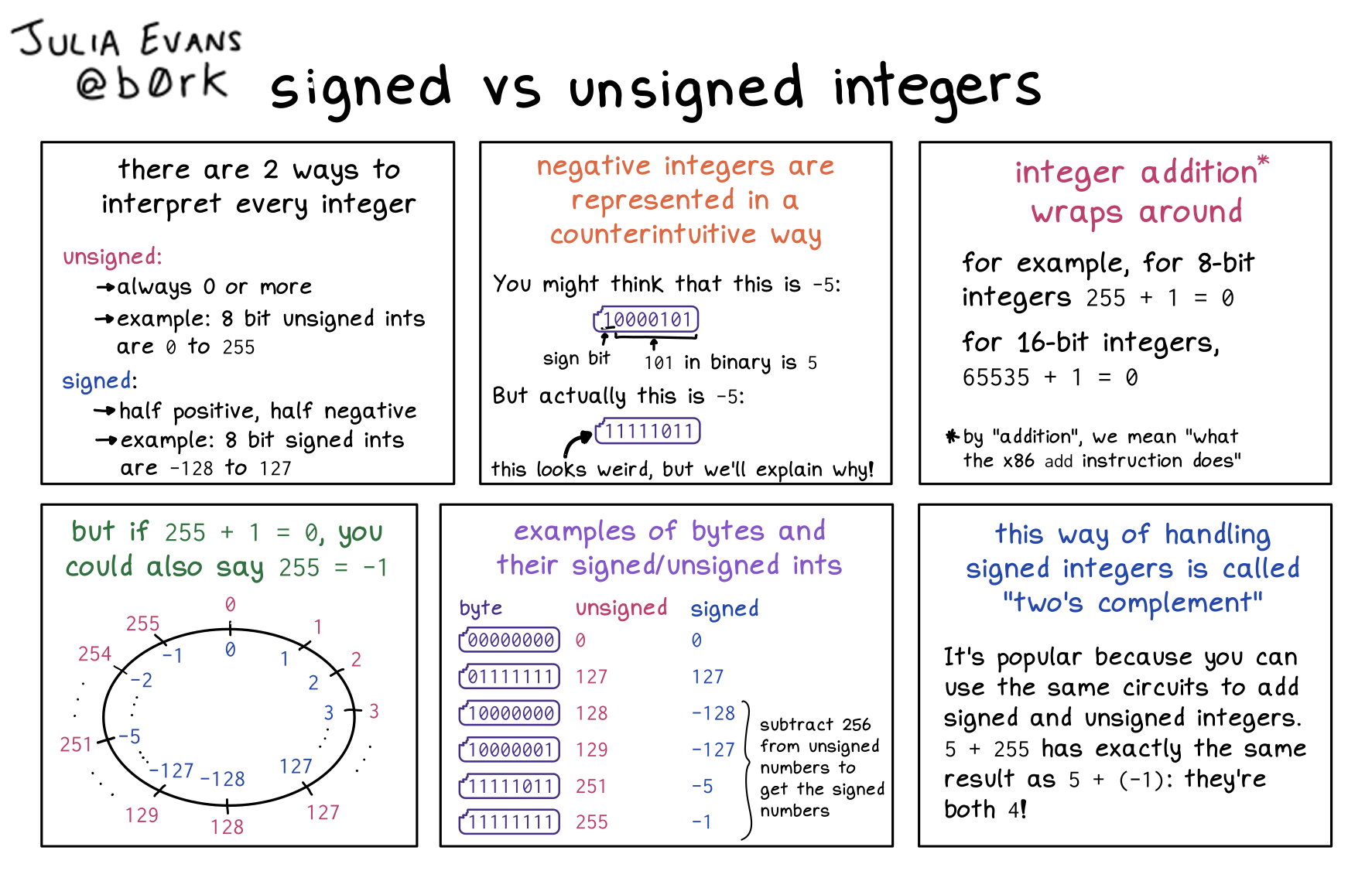
In the C and C++ programming languages, which serve as the backbone for flight controllers like the Pixhawk or platforms like ArduPilot and PX4, an “integer” is a whole number. A “signed” integer can represent both positive and negative values (e.g., -10, 0, 10). Conversely, an “unsigned int” is a data type that only represents non-negative integers (0 and positive numbers).
By removing the ability to store negative numbers, the system gains a significant advantage in range. In a standard 16-bit system, a signed integer ranges from -32,768 to 32,767. An unsigned integer of the same bit-size ranges from 0 to 65,535. This effectively doubles the positive capacity of the variable without increasing the amount of memory (RAM) required. In the resource-constrained environment of a drone’s onboard computer, this efficiency is paramount.
Why Memory Efficiency Matters for Flight Controllers
Drone innovation is a constant battle between weight, power consumption, and computational overhead. Every microgram of hardware and every milliwatt of battery power is scrutinized. This philosophy extends to the “silicon” level.
Flight controllers use microcontrollers (MCUs) that do not have the luxury of gigabytes of RAM found in desktop computers. By utilizing unsigned integers for values that can never be negative—such as motor RPM, battery percentage, or the number of satellites locked by a GPS module—developers can optimize memory usage. This allows more space for complex autonomous algorithms, such as real-time Path Planning or AI-driven obstacle avoidance, ensuring that the drone can think faster and fly longer.
Practical Applications in Autonomous Flight and Remote Sensing
The transition from a manual “remote-controlled” aircraft to a truly autonomous “intelligent” drone relies heavily on how data is categorized. Unsigned integers are the preferred data type for many of the most critical telemetry and navigational metrics.
Sensor Data Interpretation and Range Limitations
In remote sensing and autonomous flight, the drone is constantly ingesting data from an array of sensors: ultrasonic rangefinders, LiDAR, and barometers. Most of these sensors produce data that is inherently non-negative. For instance, a LiDAR sensor measuring the distance to the ground will never return a value of -5 meters.
Using an unsigned int for distance measurements provides higher precision within the same bit-depth. When a drone is mapping a terrain or performing a low-altitude inspection of a power line, the difference between a 10-bit and a 12-bit resolution can be the difference between a successful mission and a collision. By utilizing the full bit-range of an unsigned integer, developers ensure that the data fed into the AI navigation system is as granular as possible, allowing for smoother autonomous adjustments.

PWM and Motor Speed Regulation
The propulsion system of a drone is managed through Pulse Width Modulation (PWM). This involves sending high-speed digital signals to the Electronic Speed Controllers (ESCs) to dictate how fast each motor should spin. These signals are represented as numerical values—typically ranging from 1000 to 2000 microseconds in standard protocols.
Because motor speeds and signal widths cannot be negative, unsigned integers are used to handle these transmissions. This prevents “logic errors” where a negative value might inadvertently be sent to a motor controller, which could cause a catastrophic failure or an unplanned mid-air shutdown. In the context of “Tech & Innovation,” the move toward “DShot” and other digital protocols has only increased the reliance on precise, unsigned digital data to ensure the drone’s motors respond with microsecond accuracy to the AI’s commands.
Precision in Aerial Mapping and AI Computer Vision
As we move into the era of AI-powered drones, the role of the unsigned int expands from simple motor control to the complex world of computer vision and remote sensing data.
Pixel Intensity and Metadata in Remote Sensing
Modern drones used for mapping and agricultural monitoring often carry thermal or multispectral cameras. Each pixel in an image captured by these sensors is assigned a value representing light intensity or temperature. In standard 8-bit imaging, these values are stored as unsigned integers ranging from 0 (black/cold) to 255 (white/hot).
When an AI “Follow Mode” algorithm analyzes a video feed to track a hiker or a vehicle, it is essentially performing rapid-fire math on these unsigned integers. The algorithm looks for patterns in these positive numerical values to distinguish the subject from the background. Because the system doesn’t have to account for negative “light” values, the processing speed is maximized, allowing for the real-time, low-latency tracking that characterizes high-end autonomous drones.
Avoiding Overflow Errors in Navigational Algorithms
One of the most critical aspects of using unsigned integers in drone innovation is managing “overflow.” An overflow occurs when a calculation exceeds the maximum capacity of the data type. For example, if an 8-bit unsigned int is at 255 and you add 1, it wraps around to 0.
In autonomous navigation, this could be disastrous. Imagine a drone tracking its “Time Since Boot” or “Distance Traveled” using an unsigned integer. If the software is not designed to handle an overflow, the drone might suddenly think it has traveled zero miles or that its mission timer has reset, leading to a failure in its “Return to Home” (RTH) logic. Professional-grade drone tech involves rigorous “overflow protection” to ensure that as these unsigned integers climb, the drone remains aware of its physical state and its position in 3D space.

The Future of Drone Innovation: Beyond Binary Constraints
As we look toward the future of drone technology, the way we use fundamental data types like the unsigned int is evolving alongside advancements in Artificial Intelligence and Edge Computing.
The next generation of autonomous drones will likely utilize 64-bit architectures more frequently, where unsigned integers can reach astronomical values (over 18 quintillion). This capacity will be necessary for “Swarm Intelligence,” where a single coordinator must track the unique IDs, coordinates, and health statuses of hundreds of individual sub-units simultaneously. In these scenarios, the unsigned int acts as a unique digital fingerprint for every component and every drone within the network.
Furthermore, in the realm of Remote Sensing and 3D Mapping (Photogrammetry), the use of unsigned integers is becoming more integrated with cloud-based processing. As drones upload vast quantities of data to the cloud for AI analysis, the consistency of data types ensures that the “Digital Twin” of a construction site or an agricultural field is accurate to the millimeter.
In conclusion, while the term “unsigned int” may originate in the dry halls of computer science, its application is what gives life to the “smart” features of modern drones. It is the language of the sensors, the rhythm of the motors, and the vision of the AI. By maximizing efficiency and providing a stable framework for non-negative data, the unsigned integer remains one of the most vital, if invisible, innovations in the world of aerial robotics. Whether a drone is navigating a complex forest autonomously or mapping a vast desert, it is doing so one unsigned integer at a time.