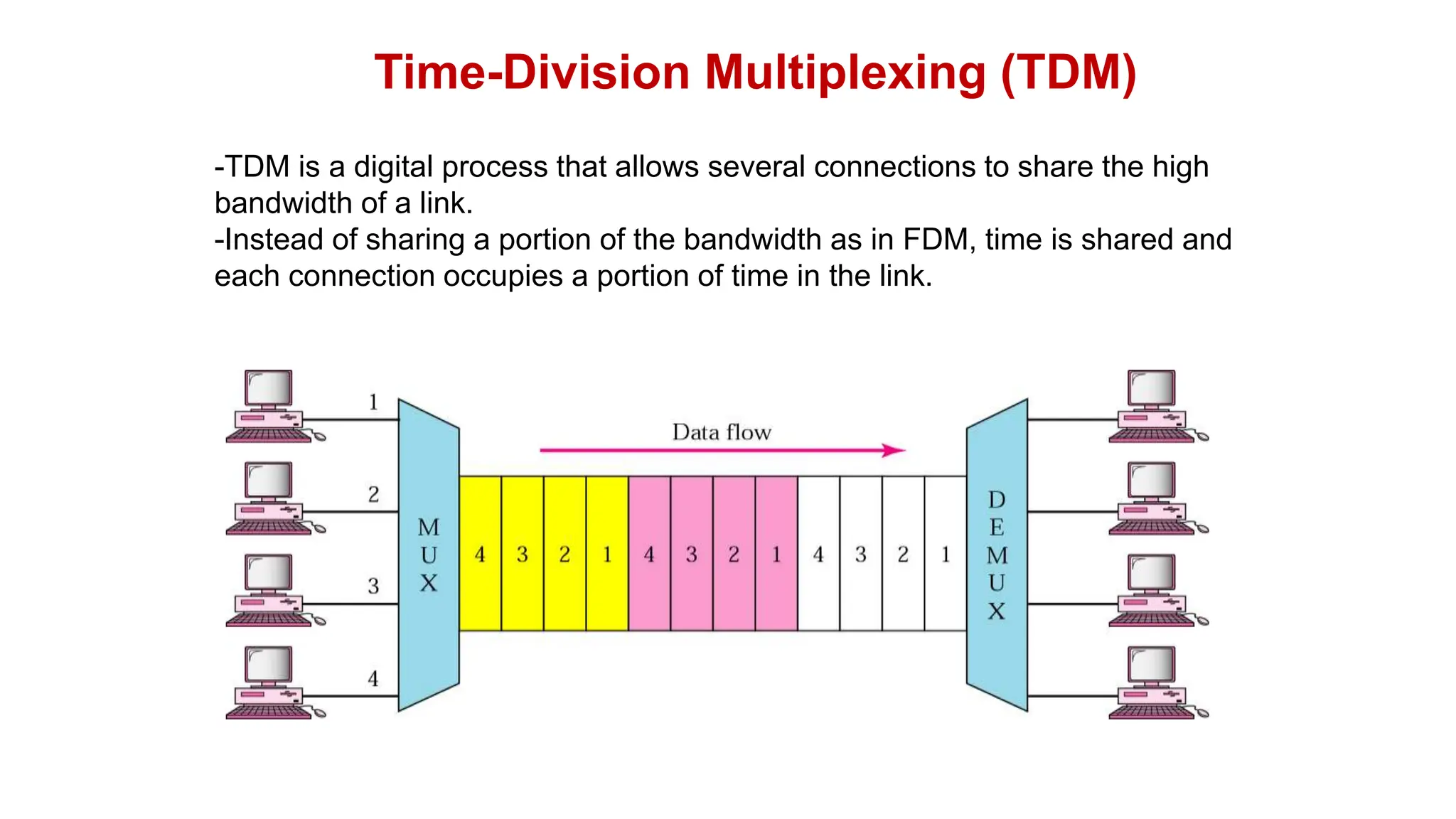
In the rapidly evolving landscape of unmanned aerial vehicles (UAVs) and sophisticated flight systems, the ability to transmit vast amounts of data reliably and instantaneously is paramount. Whether it is a commercial drone navigating a complex urban environment or a high-performance racing quadcopter maintaining a precision hover, the underlying communication architecture determines the success of the mission. At the heart of this digital communication lies a foundational concept: Time Division Multiplexing (TDM).
Time Division Multiplexing is a method of transmitting multiple signals over a single communication channel by dividing the signal into different time slots. In the context of flight technology, TDM acts as the “traffic controller” for data, ensuring that navigation commands, GPS coordinates, stabilization data, and telemetry all reach their destination without colliding. This article explores the mechanics of TDM, its critical role in flight stabilization and navigation, and why it remains a cornerstone of modern aerospace engineering.

Understanding the Fundamentals of Time Division Multiplexing
To appreciate how TDM empowers flight technology, one must first understand the basic mechanics of multiplexing. In traditional analog systems, sending multiple streams of information required multiple physical wires or distinct frequency bands. TDM revolutionizes this by utilizing the dimension of time rather than physical space or frequency alone.
How TDM Works: The Pulse and the Interval
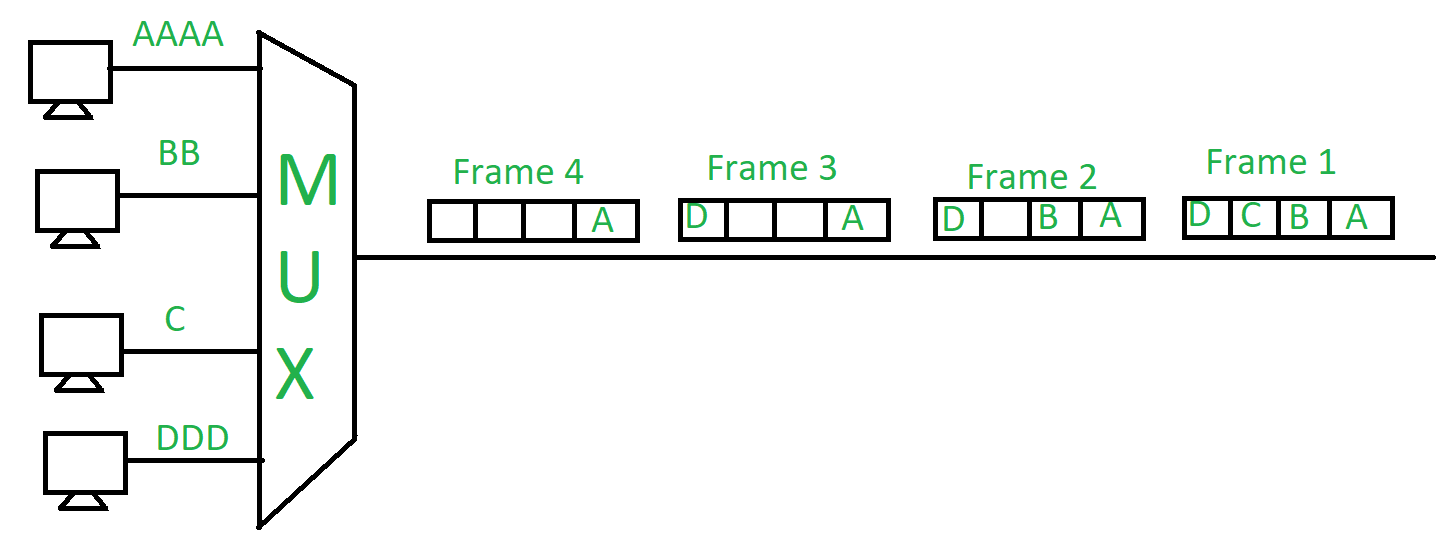
The core principle of TDM is the division of a single high-speed carrier signal into a sequence of recurring time slots. Imagine a revolving door where only one person can pass through at a time. If we assign “Person A” to represent GPS data and “Person B” to represent stabilization commands, the door allows Person A to pass for one second, then Person B for the next.
In a digital flight controller, this happens at nanosecond speeds. The system samples the input from various sensors—such as the gyroscope, accelerometer, and barometer—and places these samples into specific “frames.” Each frame is divided into slots, and each slot is dedicated to a specific data source. Because the switching happens so rapidly, the end-user (or the flight computer) perceives the data streams as simultaneous, even though they are technically taking turns.
The Difference Between Synchronous and Asynchronous TDM
In flight technology, there are two primary ways to implement this: Synchronous and Asynchronous (or Statistical) TDM.
- Synchronous TDM: Here, the time slots are pre-assigned and fixed. Even if a sensor has no new data to report (for instance, if the GPS hasn’t updated its position yet), its time slot remains reserved and empty. This is common in mission-critical flight systems where predictability and low “jitter” are essential for flight stabilization.
- Asynchronous TDM: This method allocates time slots dynamically based on demand. If the obstacle avoidance sensors detect an object and need more bandwidth to transmit high-priority data, the system can grant them more “turns” in the revolving door. While more efficient, it requires complex addressing to ensure the flight computer knows which data belongs to which sensor.
The Role of TDM in Drone Communication and Telemetry
Modern flight technology relies on a constant “conversation” between the ground control station (GCS) and the aircraft. This conversation is not a single voice but a cacophony of different data types. TDM is the mechanism that organizes this noise into a coherent digital dialogue.
Managing Uplink and Downlink Streams
A flight system typically operates on two primary paths: the Uplink (commands from the pilot or autonomous system to the drone) and the Downlink (telemetry from the drone to the pilot). TDM allows these two streams to coexist on the same radio frequency. By allocating specific time windows for the drone to “listen” and other windows for it to “talk,” TDM prevents the high-powered transmission signal from deafening the sensitive receiver on the same device. This is often referred to as Time Division Duplexing (TDD), a specialized application of TDM that is vital for long-range navigation and remote sensing.
Integrating GPS and Sensor Data
Navigation is more than just knowing a set of coordinates; it is the fusion of multiple sensor inputs. A flight controller must process data from:
- GPS/GNSS: Global positioning for waypoint navigation.
- IMU (Inertial Measurement Unit): High-speed data regarding pitch, roll, and yaw.
- Barometric Pressure Sensors: For precise altitude holding.
- Compass/Magnetometer: For directional heading.
Using TDM, the flight technology stack can “interleave” these samples. Within a single millisecond, the system receives a packet of IMU data, followed by a packet of GPS data, followed by a status check on the battery voltage. This serialized stream ensures that the central processing unit (CPU) receives a holistic view of the aircraft’s state in real-time, which is critical for autonomous navigation.
TDM vs. FDM: Why Time-Sharing Wins in Flight Systems
In the early days of radio-controlled flight, Frequency Division Multiplexing (FDM) was the standard. In FDM, different signals are sent at the same time but on different frequencies. However, as drones have become more advanced, TDM has largely taken over for several strategic reasons.
Spectrum Efficiency and Bandwidth Management
The radio frequency spectrum is a finite and crowded resource. With thousands of drones, Wi-Fi signals, and cellular networks competing for the same airwaves, FDM becomes inefficient because it requires “guard bands” (empty spaces) between frequencies to prevent interference.
TDM, however, uses the entire available bandwidth of a channel but only for a fraction of the time. This “burst” transmission style is much more resilient to interference. In flight technology, this means a more stable link between the controller and the aircraft, even in environments with heavy electromagnetic noise. Furthermore, digital TDM allows for advanced error correction, meaning that if one “time slot” is corrupted by noise, the system can quickly request a retransmission without losing the entire data stream.
Minimizing Signal Interference in Crowded Airspace
When multiple drones are flying in close proximity—such as in a search-and-rescue operation or a drone light show—signal interference is a major risk. Because TDM is based on precise timing, modern flight protocols (like FHSS – Frequency Hopping Spread Spectrum) combine TDM with frequency hopping. The system transmits in a specific time slot on one frequency, then jumps to another frequency for the next time slot. This synergy makes the navigation link nearly impossible to jam and ensures that the flight stabilization systems are not compromised by external signals.
Practical Applications in Autonomous Flight and Stabilization
The most impressive application of TDM is found within the flight stabilization loop itself. For a drone to remain level in a gust of wind, the flight controller must make hundreds of micro-adjustments per second.
Real-Time Stabilization Loops
Flight stabilization relies on a feedback loop: Sense -> Process -> Act. The “Sense” part of this loop is where TDM shines. The flight controller’s “scheduler” uses TDM to poll sensors at specific intervals. For example, the gyroscope might be polled every 125 microseconds, while the GPS is polled every 100 milliseconds.
TDM ensures that high-priority stabilization data (the gyroscope) is never blocked by lower-priority navigation data (the GPS). By organizing the data based on time-criticality, TDM allows the stabilization system to maintain a constant “heartbeat,” ensuring the aircraft remains steady even during complex maneuvers or high-speed autonomous flight.
Multi-Drone Swarm Communication
In the realm of Tech and Innovation, drone swarms are becoming increasingly common. Swarm technology requires drones to communicate with each other to avoid collisions and maintain formation. TDM is the primary protocol used to manage these “mesh” networks. Each drone in the swarm is assigned a specific time slot to broadcast its position and velocity. Because every drone knows exactly when to transmit, the entire swarm can share a single radio channel without their signals overlapping. This precision is what enables hundreds of drones to move as a single, coordinated entity.
The Future of Multiplexing in Next-Gen UAV Navigation
As we look toward the future of flight technology, the role of Time Division Multiplexing is only set to expand. With the integration of 5G connectivity and AI-driven remote sensing, the volume of data being processed by aircraft is growing exponentially.
Integration with AI-Driven Data Processing
Future flight systems will incorporate “Cognitive TDM,” where AI algorithms analyze the flight environment in real-time and adjust time-slot allocations on the fly. For instance, if a drone enters a high-risk obstacle environment, the AI could automatically increase the TDM frequency for the obstacle avoidance sensors, temporarily reducing the bandwidth for non-essential telemetry. This level of intelligent resource management will be vital for the next generation of autonomous delivery drones and urban air mobility (UAM) vehicles.
Conclusion
Time Division Multiplexing may seem like a hidden technical detail, but it is the invisible architecture that makes modern flight technology possible. By masterfully managing the dimension of time, TDM allows for the seamless integration of navigation, stabilization, and communication systems. It transforms a chaotic stream of sensor data into a precise, actionable flow of information, ensuring that whether a drone is flying a cinematic path or conducting a complex mapping mission, it remains stable, responsive, and safe. As we push the boundaries of what is possible in the skies, TDM will remain the heartbeat of the digital cockpit, pulse by pulse, slot by slot.