In the rapidly evolving landscape of Unmanned Aerial Vehicles (UAVs), the path from a conceptual sketch to a fully autonomous aircraft is fraught with technical challenges. At the heart of this development cycle lies a critical concept: the “mock.” While the term might evoke images of a simple physical replica, in the realm of high-end drone tech and innovation, a mock represents a sophisticated suite of simulated environments, digital twins, and software abstractions. These tools are the silent architects of modern drone capabilities, allowing engineers to push the boundaries of AI, remote sensing, and autonomous navigation without the catastrophic risks of real-world failure.

Understanding the “Mock” in Modern Drone Technology
At its most fundamental level, a mock is a substitute for a real component or environment, used to facilitate development and testing. In the context of drone innovation, this concept bifurcates into two essential streams: hardware mockups for physical design and software “mocking” for systemic intelligence.
Software Mocking vs. Hardware Mockups
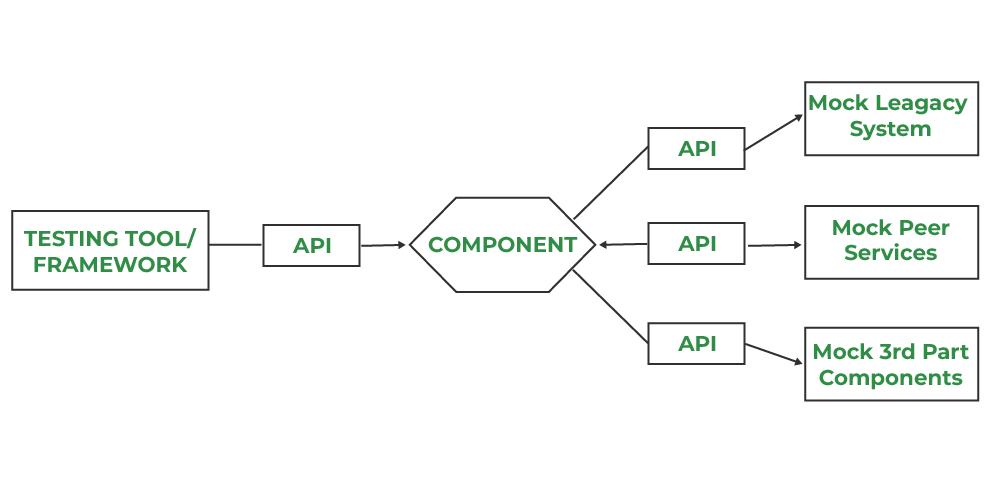
Hardware mockups are often the first step in the physical design process. These non-functional or semi-functional prototypes allow engineers to evaluate ergonomics, weight distribution, and component placement. However, the true innovation occurs in software mocking. In the world of drone coding, “mocking” involves creating simulated objects that mimic the behavior of real-world hardware components, such as a GPS module, an IMU (Inertial Measurement Unit), or a complex LIDAR sensor. By using mocks, developers can write and test flight control logic long before the actual hardware is even manufactured.
The Digital Twin Revolution
One of the most advanced applications of the “mock” concept is the “Digital Twin.” This is a high-fidelity virtual model that exists in a simulated physics environment. Unlike a static model, a digital twin responds to virtual wind, gravity, and signal interference exactly as a physical drone would. This allows for “Software-in-the-Loop” (SITL) testing, where the drone’s actual autopilot firmware is run inside a computer, interacting with a mocked world. This convergence of data and reality is what enables companies to iterate at a pace that was previously unthinkable.
Mocking Environments for Autonomous Flight
The push toward full autonomy—where a drone can navigate complex environments without human intervention—is heavily reliant on mocked environments. To train a drone to “see” and “think,” it must be exposed to thousands of hours of flight data, much of which would be too dangerous or expensive to obtain in the real world.
Simulating Physics and Aerodynamics
To innovate in autonomous flight, developers use “physics mocks.” These are highly complex mathematical engines that simulate fluid dynamics and mechanical stresses. For example, if a drone is designed to deliver packages in high-wind urban canyons, developers will mock the specific aerodynamic turbulence of those locations. This allows the flight controller’s AI to learn how to compensate for “propwash” or sudden gusts in a virtual space, ensuring that when the physical drone finally takes flight, its stabilization algorithms are already “experienced.”
Testing AI Neural Networks in Risk-Free Environments
Artificial Intelligence is the backbone of modern drone innovation. However, training an AI to recognize obstacles or follow a subject requires vast amounts of visual data. By creating mocked 3D environments—digital recreations of forests, construction sites, or industrial plants—developers can feed synthetic visual data into the drone’s AI. These “mock missions” allow for edge-case testing: what happens if a bird flies into the sensor? What if the sun creates a blinding glare on the lens? Mocking these scenarios ensures the AI can handle the unpredictability of the real world without a single propeller ever spinning.
The Importance of Mocks in Remote Sensing and Mapping

Innovation in drones is not limited to how they fly; it is also about the data they collect. Remote sensing and photogrammetry (the science of making measurements from photographs) rely on precise sensor integration, which is another area where “mocking” is indispensable.
Generating Synthetic Data for Sensor Calibration
When a drone is equipped with advanced sensors like thermal cameras or multispectral scanners for agricultural analysis, the data output must be perfectly calibrated. Engineers use mocked data sets to test the processing pipelines. By feeding the drone’s computer a “mock” data stream that represents a known agricultural field with specific nutrient deficiencies, they can verify if the mapping software correctly identifies the problem. This prevents the “garbage in, garbage out” cycle, ensuring that the innovation in the sensor hardware is matched by innovation in data interpretation.
Validating Geospatial Algorithms
Mapping drones must stitch thousands of images into a single, geographically accurate 3D model. Developing the algorithms for this requires a “mock” ground truth. Engineers create a virtual landscape where every coordinate is known down to the millimeter. They then “fly” a virtual drone over this mock landscape to capture virtual images. By comparing the 3D model generated by the software to the original virtual “mock” landscape, they can identify minute errors in the stitching logic, leading to the hyper-accurate mapping tools used in modern construction and surveying.
From Mock to Mission: The Workflow of Drone Innovation
The transition from a mocked environment to a real-world mission is a structured process that characterizes the “fail fast, learn faster” ethos of the tech industry. This workflow is what allows startups and established aerospace giants alike to deploy new features with confidence.
Rapid Prototyping and Iterative Design
The use of mocks facilitates a “modular” approach to innovation. If an engineer wants to test a new “Follow-Me” mode based on AI vision, they don’t need to build a whole new drone. They simply mock the sensor inputs for the existing platform and run the new code in a simulator. This rapid prototyping allows for dozens of iterations in a single day. In the time it would take to charge a real drone battery, a developer could have run 100 mock flights, identified 10 bugs, and pushed a software update.
Reducing Development Costs and Safety Risks
Perhaps the most practical reason for the “mock” in drone tech is the reduction of risk. High-end enterprise drones can cost upwards of $20,000, and their payloads—such as specialized methane gas detectors or high-resolution LIDAR—can double that price. Using a mock-based development cycle ensures that by the time the hardware is airborne, the software is “battle-hardened.” This preserves capital and, more importantly, ensures the safety of people and property on the ground during the testing phases of innovative new flight modes.
The Future of Virtual Testing in the UAV Industry
As we look toward the future, the concept of the “mock” is becoming even more integrated into the lifecycle of a drone, moving beyond the development phase and into the operational phase.
Real-Time Cloud Simulations
The next frontier of drone innovation involves cloud-based mocks. Imagine a fleet of autonomous delivery drones that constantly upload their flight data to a cloud-based “mock” of the city they operate in. As the city changes—new buildings go up, or trees grow—the central “mock” is updated. This allows the drones to “rehearse” their routes in a virtual simulation every night, optimizing for new obstacles or changing weather patterns before they ever take off the next morning.
The Shift Toward Full Autonomy
We are approaching a point where the “mock” and the “reality” are becoming indistinguishable to the drone’s onboard computer. This is the ultimate goal of tech and innovation in the UAV sector: to create a system so intelligent that it treats every real-world flight as a verified execution of a thousand mocked successes. As sensor technology improves and processing power increases, the “mocks” we build today will become the foundations for the fully autonomous, hyper-reliable drone networks of tomorrow.
In conclusion, a “mock” is far from a mere imitation. In the high-stakes world of drone innovation, the mock is the laboratory. it is the safe space where AI is born, where sensors are tuned, and where the future of flight is rigorously tested. By mastering the art of the mock, the UAV industry continues to transform what was once science fiction into reliable, everyday technology.