In the sophisticated world of unmanned aerial vehicles (UAVs) and advanced flight technology, precision is the primary objective. However, as drone designers and flight control engineers push the boundaries of speed, agility, and autonomy, they frequently encounter complex physical phenomena that defy simple linear logic. One of the most critical, yet least understood, concepts in high-level flight dynamics is bifurcation.
At its core, a bifurcation refers to a “splitting” or a qualitative change in the behavior of a dynamic system—such as a drone in flight—resulting from a small change in a parameter, like airspeed, motor RPM, or angle of attack. In the context of flight technology, understanding bifurcation is the difference between a stable, predictable aircraft and one that suddenly enters an uncontrollable tumble. This article explores the mechanics of bifurcation theory within flight systems, its impact on stability, and how modern flight controllers manage these transitions to ensure safe operations.
The Mechanics of Bifurcation in Flight Dynamics
To understand bifurcation, one must first view a drone not as a static object, but as a “dynamic system” governed by mathematical equations. These equations describe how the drone moves in response to inputs from the flight controller and forces from the environment.
Understanding Equilibrium and Stability
In flight technology, an “equilibrium” or “trim state” is a condition where the forces and moments acting on the drone are balanced, allowing it to maintain a steady state—such as a level hover or a constant forward cruise. Stability refers to the drone’s ability to return to this equilibrium after being nudged by a gust of wind or a pilot’s stick input.
Bifurcation occurs when a change in a control parameter (like increasing the tilt angle) causes the existing equilibrium to disappear or become unstable, often giving birth to new, different states of motion. For example, a drone might be perfectly stable at a 20-degree tilt, but at 25 degrees, the aerodynamic flow changes so drastically that the flight controller can no longer maintain a steady orientation. That “tipping point” is a bifurcation.
The Transition from Linear to Non-Linear Behavior
Most basic flight controllers, such as standard PID (Proportional-Integral-Derivative) loops, operate on the assumption of linearity—the idea that if you double the motor output, you get a proportional increase in thrust and stability. However, aerodynamics are inherently non-linear.
As a drone moves into high-speed regimes or undergoes aggressive maneuvers, the air flowing over the propellers and frame creates complex vortices. Bifurcation theory allows engineers to map these non-linear transitions. By identifying bifurcation points, developers can program flight technology to “know” when it is approaching a boundary where traditional control logic will fail, allowing the system to switch to more robust, non-linear control laws.
Types of Bifurcations in Multirotor and Fixed-Wing Systems
Not all instabilities are created equal. In flight technology, different types of bifurcations lead to different physical outcomes, ranging from minor oscillations to catastrophic structural failure.
Hopf Bifurcation and Aeroelastic Flutter
One of the most common types in flight tech is the Hopf Bifurcation. This occurs when a stable equilibrium point (like a steady hover) evolves into a “limit cycle”—a persistent, repeating oscillation. In the real world, we see this as “jello” in a camera feed or high-frequency vibrations in the drone’s arms.
If the flight controller’s gain settings are too high, the system may cross a Hopf bifurcation point, leading to “flutter.” This is particularly dangerous for fixed-wing long-range drones, where the wings may begin to vibrate uncontrollably due to the interaction between aerodynamic forces and structural elasticity. Understanding the Hopf bifurcation point allows engineers to set “gain schedules” that automatically dampen these oscillations before they lead to mechanical failure.
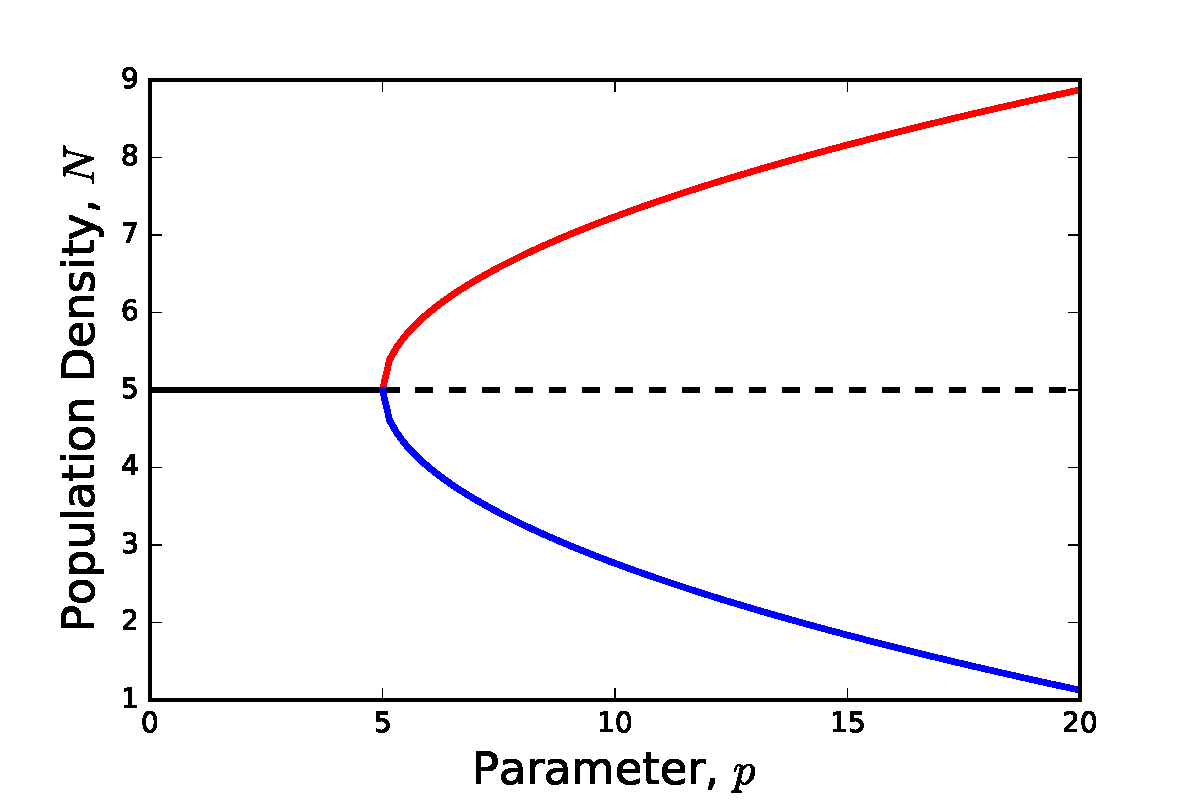
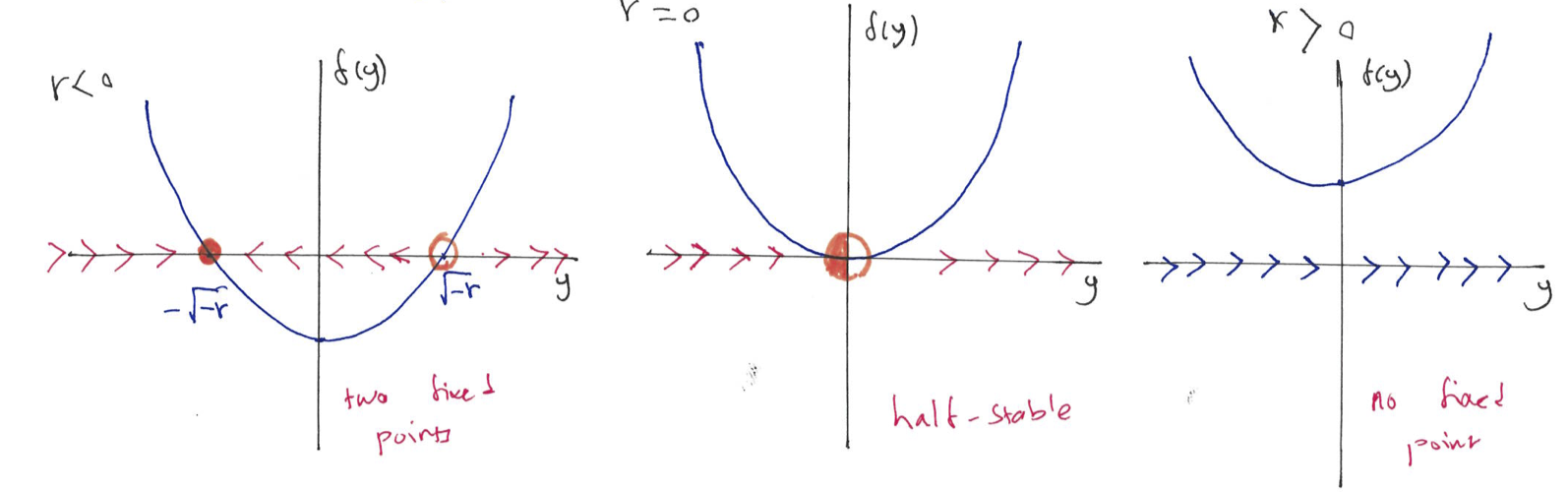
Pitchfork and Saddle-Node Bifurcations
In certain flight regimes, a drone might encounter a Saddle-Node Bifurcation, where two equilibrium states—one stable and one unstable—collide and vanish. Imagine a drone trying to maintain a hover in a heavy tailwind. As the wind speed increases (the parameter), the drone tilts further to compensate. Eventually, it reaches a critical wind speed where the “hover” equilibrium simply ceases to exist because the drone cannot tilt any further without losing altitude. The drone then “drops” or “flips” into a completely different state of motion.

Similarly, Pitchfork Bifurcations can occur in symmetrical aircraft. A drone flying perfectly straight may suddenly find that the “straight” path is no longer stable, and it “branches” into a state where it must yaw slightly to one side or the other to maintain lift. Recognizing these mathematical “forks in the road” is essential for developing autonomous navigation systems that can handle extreme environmental conditions.
Real-World Applications: Managing Flight Boundaries
While the math behind bifurcation is complex, its practical application in flight technology is what keeps modern drones in the air under adverse conditions.
Preventing the Vortex Ring State (VRS)
Perhaps the most famous example of a bifurcation-related disaster in the drone world is the Vortex Ring State (VRS), often called “settling with power.” When a multicopter descends too quickly into its own downwash, the air begins to recirculate around the propellers in a toroidal (donut-shaped) pattern.
This is a classic bifurcation: the stable “thrust-producing” state of the propeller suddenly vanishes, replaced by a state where increasing motor power actually decreases lift. Modern flight technology uses sensors like barometers and GPS to monitor descent rates. Advanced flight controllers are now programmed with “VRS Avoidance” logic, which limits the descent speed based on the drone’s current airspeed to ensure the system never crosses the bifurcation threshold into the vortex ring state.
High-Angle-of-Attack Maneuvers
For fixed-wing UAVs used in mapping or surveillance, the “stall” is a bifurcation point. When the angle of attack becomes too steep, the smooth laminar flow over the wing breaks away, turning into turbulent wake. By applying bifurcation analysis, flight tech developers can create “envelope protection” systems. These systems act as a digital safety net, preventing the pilot (or the AI) from commanding a maneuver that would push the aircraft past its critical bifurcation point, thereby maintaining lift even during aggressive turns.
Control Systems and Bifurcation Analysis
The ultimate goal of studying bifurcation in flight technology is to build smarter, more resilient controllers. We are moving away from simple “one-size-fits-all” stabilization toward “bifurcation-aware” systems.
Designing Robust PID and Nonlinear Controllers
Standard PID controllers are excellent for steady-state flight, but they struggle when the system undergoes a bifurcation. For example, if a drone loses a propeller (a major structural bifurcation), a standard PID controller will likely crash the aircraft because it expects symmetrical thrust.
However, advanced flight technology—like that found in high-end autonomous drones—uses Adaptive Control. These systems use real-time bifurcation analysis to detect when the drone’s behavior has shifted. If a motor fails, the controller recognizes the “branching” of the flight dynamics and immediately switches to a “emergency spin” mode, using the remaining motors to maintain a controlled descent. This is only possible by understanding the mathematical “alternative states” available to the drone.
Safety Protocols and Fail-Safe Mechanisms
Bifurcation theory also plays a role in “Geo-fencing” and automated Return-to-Home (RTH) protocols. By calculating the “Stability Margin”—the distance between the current flight state and the nearest bifurcation point—the flight computer can provide a “health score” for the flight. If the margin becomes too thin due to battery degradation, high winds, or motor wear, the flight technology can trigger a preemptive fail-safe, landing the drone before an uncontrollable bifurcation occurs.
The Future of Stable Flight through Bifurcation Analysis
As we look toward the future of flight technology, the role of bifurcation analysis will only grow. With the rise of Urban Air Mobility (UAM) and large-scale delivery drones, the stakes of flight instability are higher than ever. These larger craft must navigate “urban canyons” with unpredictable wind gusts that can trigger sudden changes in flight dynamics.
Innovations in Artificial Intelligence and Machine Learning are now being used to map these bifurcation points in real-time. Instead of engineers manually programming every possible flight scenario, AI models are trained on vast amounts of flight data to “feel” when a bifurcation is approaching. This allows the flight technology to proactively adjust the center of gravity, tilt the rotors, or change the throttle curve to bypass the instability entirely.
In conclusion, “bifurcation” is more than just a mathematical term; it is the study of the boundaries of flight. By understanding where and why a drone’s stability “splits” or fails, flight technology developers can create aircraft that are not only more agile and efficient but also significantly safer. Whether it is preventing a stall in a fixed-wing UAV or managing the complex vibrations of a racing drone, bifurcation analysis remains the invisible hand that guides modern autonomous flight through the most turbulent of skies.