In the rapidly evolving landscape of Unmanned Aerial Vehicles (UAVs), the distinction between “hardware” and “software” is becoming increasingly blurred. Modern drones are no longer just flying cameras; they are sophisticated, flying edge-computing nodes capable of autonomous navigation, real-time object recognition, and complex data processing. As these capabilities expand, the software architecture powering them must become more robust, portable, and scalable. This is where Docker enters the frame.
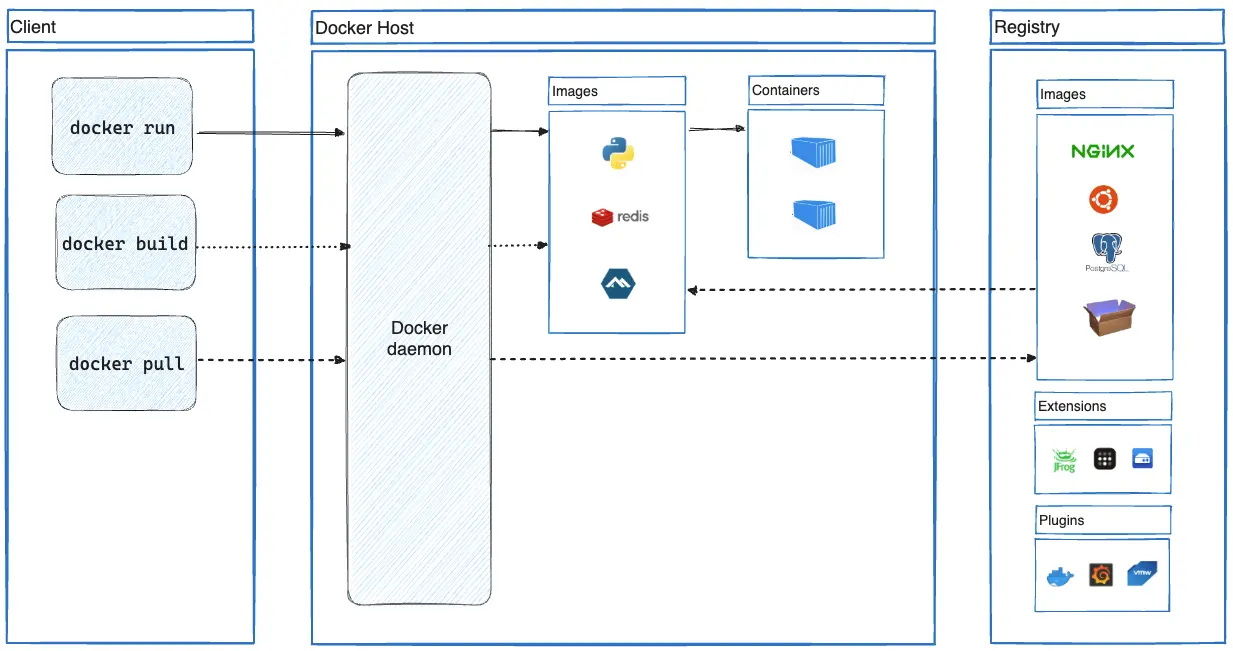
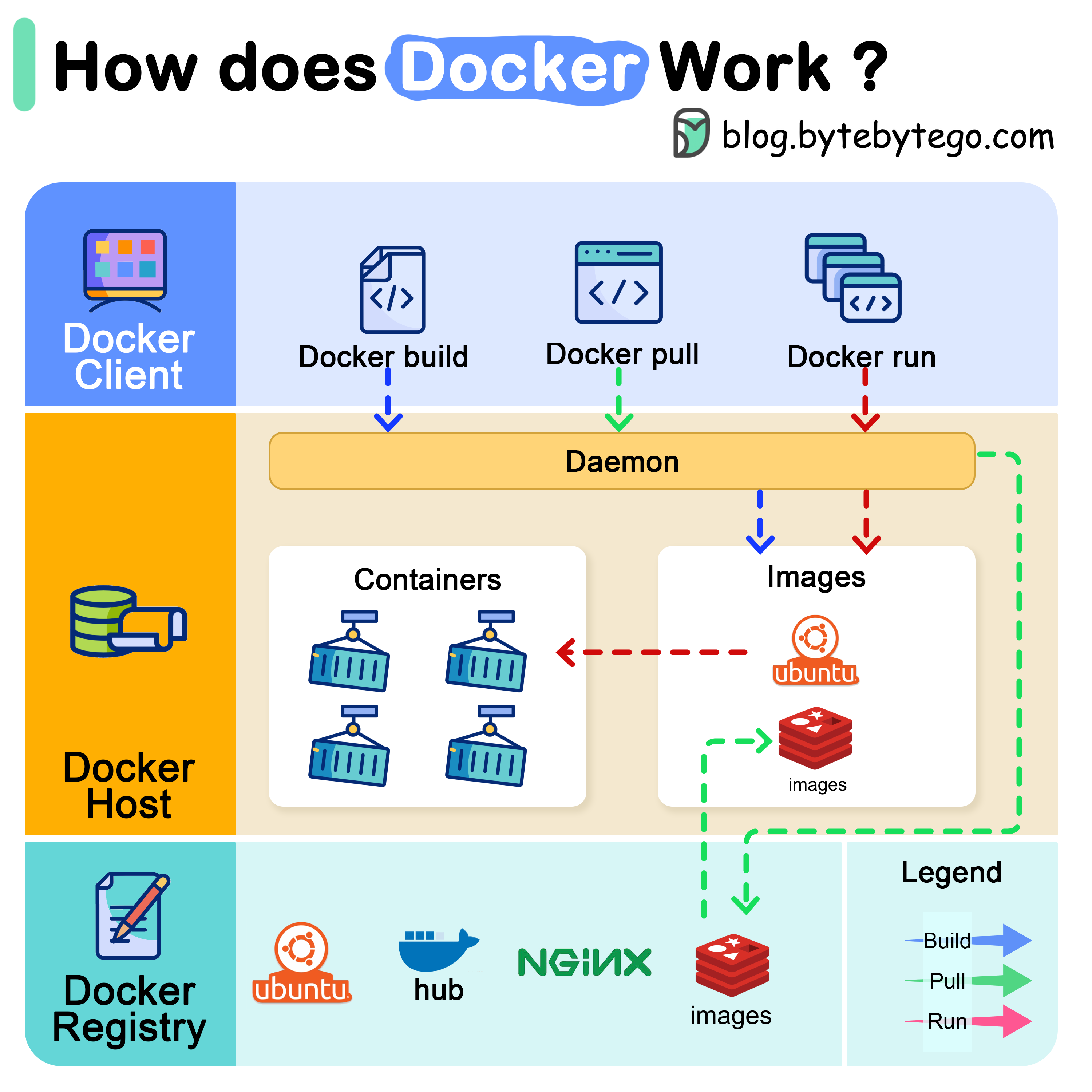
In the realm of Tech & Innovation, Docker is a revolutionary tool that has transitioned from data centers to the onboard computers of high-end drones. But what exactly does Docker do, and why is it becoming the backbone of next-generation autonomous flight and remote sensing? At its core, Docker is a platform designed to help developers “containerize” applications, ensuring they run identically regardless of the environment. In the context of drone innovation, Docker facilitates the seamless deployment of AI, mapping algorithms, and flight control logic across diverse hardware ecosystems.
Streamlining Autonomous Flight Development and Deployment
The development of autonomous flight systems is fraught with “dependency hell.” An autonomous drone relies on a complex stack of software, including the Robot Operating System (ROS), computer vision libraries like OpenCV, and deep learning frameworks like TensorFlow or PyTorch. Traditionally, installing these on a drone’s onboard computer (such as an NVIDIA Jetson or a Raspberry Pi) was a manual, error-prone process.
Ensuring Environment Consistency from Simulation to Sky
One of the primary functions of Docker is to ensure that the software environment used by an engineer on a high-powered workstation is identical to the one running on the drone’s hardware. In the drone industry, much of the initial testing happens in SITL (Software-In-The-Loop) simulations. Without Docker, a developer might find that a flight algorithm works perfectly in a Linux-based simulator but crashes on the drone due to a minor version mismatch in a mathematical library.
By using Docker, the entire environment—the OS, the libraries, and the code—is packaged into a “container.” This container is immutable. When the pilot or engineer deploys this container to the drone, they can be 100% certain that the code will execute exactly as it did during the simulation phase, drastically reducing the risk of mid-air software failures.
Facilitating Rapid Prototyping and Version Control
In the field of drone innovation, the ability to iterate quickly is a competitive advantage. Docker allows developers to maintain multiple versions of their flight software on a single device without interference. If a new experimental “AI Follow Mode” fails during a field test, the operator can instantly roll back to a previous, stable Docker image. This modularity allows for “hot-swapping” capabilities—changing the drone’s mission profile from a mapping tool to a thermal inspection tool simply by launching a different container.
Docker at the Edge: Real-Time Processing on UAVs
“Edge computing” refers to processing data near the source (the drone) rather than sending it to a distant cloud server. This is critical for drones because of latency; an autonomous drone cannot wait two seconds for a cloud server to tell it there is an obstacle in its path. Docker is the premier tool for managing these edge applications.
Optimization for On-Board Computing
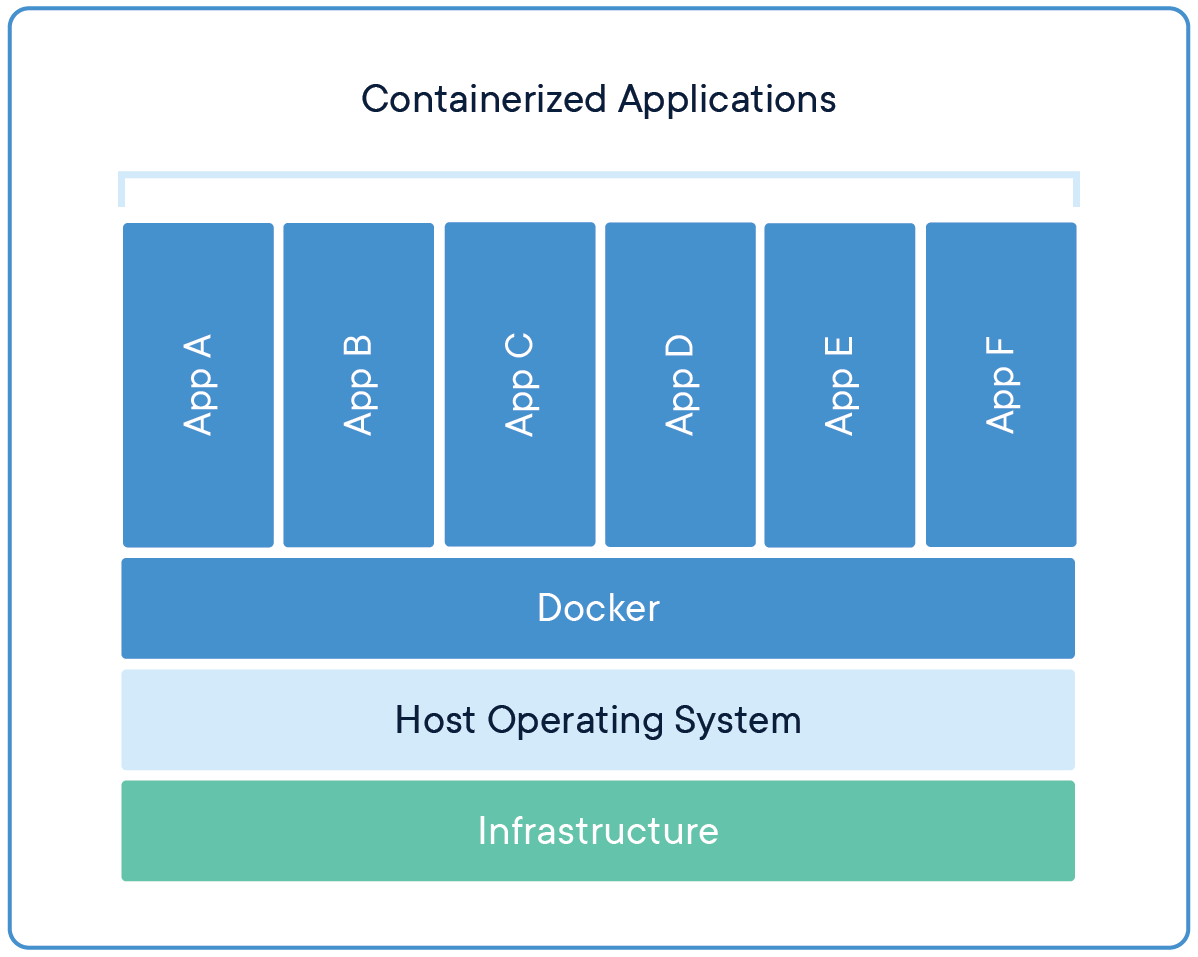
Drones have limited computational resources and battery life. Running a full virtual machine (VM) to isolate software would be too heavy and would drain the battery rapidly. Docker containers, however, share the host system’s kernel, making them incredibly lightweight. What Docker does is provide the isolation of a VM with the performance of a native application.
For drones equipped with AI-driven obstacle avoidance, Docker allows the neural network to access the GPU (via tools like NVIDIA Container Toolkit) with near-zero overhead. This ensures that the drone can process high-frame-rate video feeds in real-time to navigate complex environments, such as forests or construction sites, without the “weight” of traditional virtualization.
Over-the-Air (OTA) Updates for Remote Fleets
For companies managing a fleet of hundreds of drones, manually updating software is impossible. Docker simplifies the deployment of Over-the-Air updates. Instead of sending a massive firmware patch that risks bricking the device, developers can push a new Docker image layer. Because Docker only sends the “diff” (the changes between the old version and the new version), the update is small and fast. This is vital for drones operating in remote areas with limited LTE or satellite connectivity, ensuring they always have the latest safety protocols and mapping algorithms.
Managing Complex Data Ecosystems: Mapping and Remote Sensing
Mapping and remote sensing are perhaps the most data-intensive applications in the drone industry. Whether it is LiDAR point-cloud generation or multispectral imaging for precision agriculture, the software required to process this data is immense. Docker plays a pivotal role in organizing these data pipelines.
Cloud-to-Drone Synchronization
In many modern workflows, the drone performs “pre-processing” in the air and “post-processing” in the cloud. Docker provides a unified language for both stages. For example, a drone might run a lightweight Docker container to stitch low-resolution preview images for the pilot. Once the drone lands, the same Docker container—scaled up with more CPU and RAM resources—can be triggered in a cloud environment to generate a high-resolution 3D orthomosaic map. This “write once, run anywhere” philosophy eliminates the need to rewrite code for different stages of the data lifecycle.
Scalable Data Pipelines for Photogrammetry
Photogrammetry (the science of making measurements from photographs) requires massive parallel processing. When a drone completes a mission and uploads thousands of 4K images, Docker-based architectures (often orchestrated by Kubernetes) can spin up dozens of containers simultaneously to process the imagery. This drastically reduces the “time-to-insight,” allowing construction managers or farmers to receive their processed maps in minutes rather than days. By containerizing the photogrammetry engine, innovation-led companies can ensure their software is scalable and easy to maintain.
Enhancing Security and Reliability in Drone Swarms
As we move toward a future of “drone swarms” and coordinated autonomous flight, the complexity of communication increases exponentially. Docker provides the security and isolation necessary to keep these systems running safely.
Isolated Execution for Critical Systems
A modern drone runs many processes simultaneously: flight control, telemetry communication, payload management, and obstacle avoidance. If the “AI Follow Mode” software encounters a memory leak or a crash, it could potentially take down the entire system. Docker mitigates this through isolation. What Docker does is “sandbox” the non-critical applications. If a containerized mapping app crashes, the core flight controller remains unaffected, allowing the drone to perform a safe “Return to Home” (RTH) procedure.
Orchestrating Multi-Drone Deployments
In Tech & Innovation, the cutting edge is currently focused on “Drone-in-a-Box” solutions and autonomous swarms. These systems require a high level of orchestration. Docker, paired with orchestration tools like Kubernetes or K3s (a lightweight version for the edge), allows a central command center to manage the software state of multiple drones at once. If a specific drone in a swarm needs a specialized sensor update for a thermal imaging mission, that specific Docker container can be deployed to just that unit, while the rest of the swarm continues with standard optical sensing.
The Future of Containerized Aviation
The integration of Docker into the drone industry represents a shift from “embedded hardware” thinking to “software-defined” thinking. As drones become more integrated with AI and IoT (Internet of Things), the ability to package, deploy, and scale software becomes the primary driver of innovation.
By using Docker, the drone industry is adopting the best practices of the multi-trillion-dollar software industry. This means more reliable flights, faster updates, and the ability to run complex AI models that were previously reserved for supercomputers. Whether it is a drone mapping a disaster zone or an autonomous UAV delivering a package in a dense urban environment, Docker is the “invisible engine” that ensures the software on board is as capable and resilient as the hardware it inhabits.
In conclusion, “what Docker does” is provide a standardized, secure, and efficient way to bridge the gap between complex software development and the rugged, unpredictable world of aerial robotics. It is not just a tool for web developers; it is a fundamental pillar of modern drone tech and innovation.