In the world of unmanned aerial vehicles (UAVs), speed is often discussed in terms of “max throttle” or “burst acceleration.” However, there is a fundamental physical limit that every drone pilot, engineer, and safety officer must understand: terminal velocity. While we often focus on how fast a drone can climb or cruise, the physics of how fast it falls—or the maximum speed it can achieve before air resistance prevents further acceleration—is critical for flight dynamics, regulatory compliance, and risk management.
Terminal velocity is the constant speed that a free-falling object reaches when the resistance of the medium through which it is falling prevents further acceleration. For drones, this isn’t just a theoretical concept; it is the “speed limit” dictated by nature. Whether you are operating a 250g micro-drone or a 25kg industrial heavy-lifter, terminal velocity dictates the potential energy of an impact and the aerodynamic constraints of high-speed maneuvers.
The Fundamental Physics of Terminal Velocity for Drones
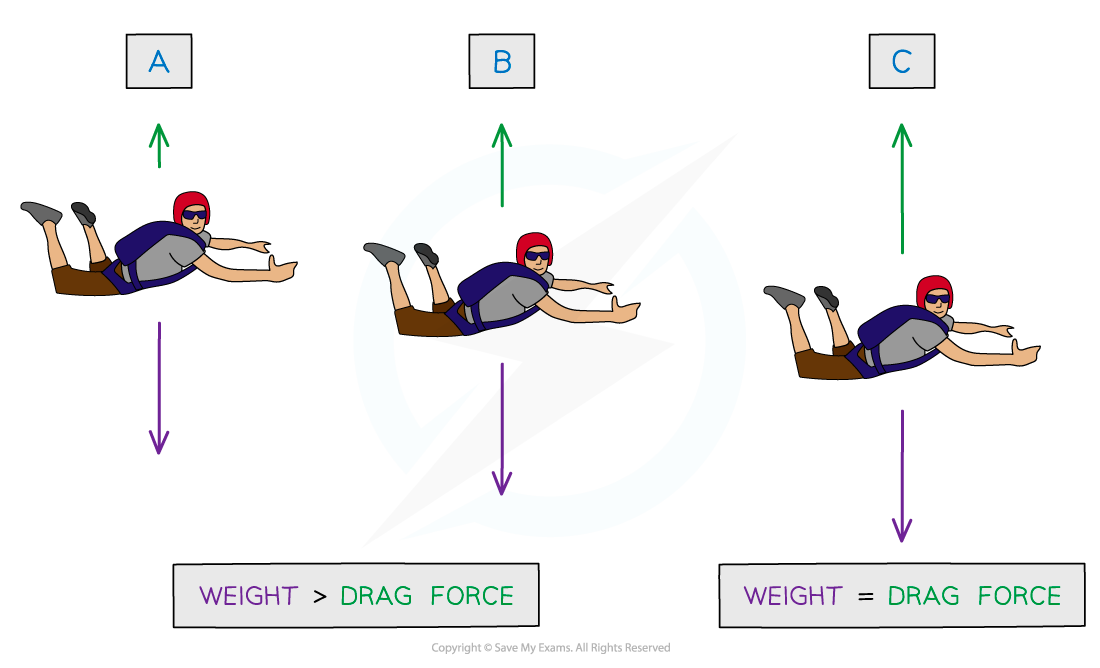
To understand the speed of terminal velocity, we must look at the tug-of-war between two primary forces: gravity and drag. When a drone is in a state of free fall (due to a motor failure or power loss), gravity pulls it toward the earth, causing it to accelerate. As the drone gains speed, it encounters air molecules that create an opposing force known as aerodynamic drag.
Gravity vs. Drag: The Balancing Act
At the start of a fall, gravity is the dominant force. The drone accelerates at approximately 9.8 meters per second squared ($m/s^2$). However, drag is proportional to the square of the velocity. This means that as the drone doubles its speed, the air resistance quadruples. Eventually, the upward force of drag equals the downward force of gravity. At this precise moment, the net force becomes zero, acceleration stops, and the drone continues to fall at a steady rate. This is the terminal velocity.
The Formula Behind the Fall
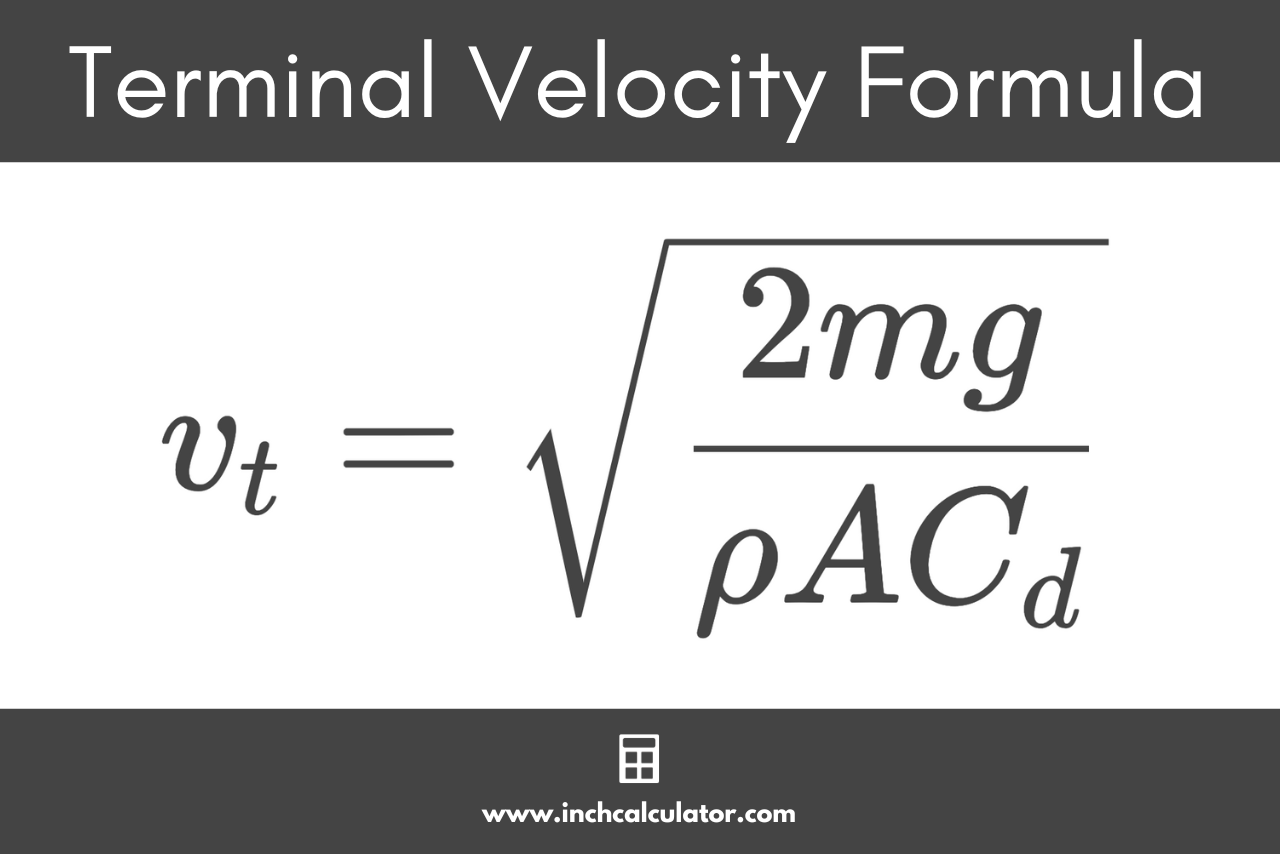
The terminal velocity ($vt$) of a drone can be calculated using a specific formula that accounts for its physical characteristics:
$vt = sqrt{frac{2mg}{rho AC_d}}$
Where:
- m is the mass of the drone.
- g is the acceleration due to gravity.
- ρ (rho) is the density of the air.
- A is the projected frontal area of the drone.
- $C_d$ is the drag coefficient (how aerodynamic the shape is).
From this formula, we can see that a heavier drone with a small surface area will have a much higher terminal velocity than a lightweight, bulky drone. This explains why a racing drone, built like a sleek projectile, falls much faster than a cinematic drone with large prop guards and a wide frame.
Calculating Terminal Velocity for Common Drone Classes
Not all drones are created equal when it comes to aerodynamics. The “speed” of terminal velocity varies significantly depending on the category of the UAV.
Micro Drones and Cinewhoops
Sub-250g drones, such as the DJI Mini series or FPV Cinewhoops, have a relatively low terminal velocity. Because they are lightweight but have a significant surface area relative to their mass, they reach their “equilibrium” quickly. A typical micro drone might reach a terminal velocity of approximately 15 to 25 meters per second (33–56 mph). For these drones, the air acts as a thick fluid, slowing them down significantly and reducing the kinetic energy during a crash.
Enterprise and Heavy-Lift Platforms
On the other end of the spectrum, industrial drones like the Matrice 350 RTK or heavy-lift cinema rigs carrying Arri Alexa cameras have much higher terminal velocities. These platforms are heavy and often designed with dense components. If such a drone were to experience a total power failure at 400 feet, it could reach speeds exceeding 40 to 50 meters per second (90–112 mph) before hitting the ground. The momentum generated at these speeds is why structural integrity and fail-safe systems are so heavily emphasized in the enterprise sector.
The Role of Surface Area and Orientation
One variable often overlooked is the “tumble factor.” A drone rarely falls in a perfectly aerodynamic “nose-down” position. Most drones will tumble, which constantly changes the surface area ($A$) and the drag coefficient ($C_d$). If a drone falls flat (pancake style), the terminal velocity is lowered because the broad surface of the arms and body creates maximum drag. If it falls vertically or edge-first, it slices through the air with less resistance, resulting in a much higher terminal velocity.
Why Terminal Velocity Matters for Pilot Safety and Regulations
For drone manufacturers and regulatory bodies like the FAA or EASA, terminal velocity is more than a physics problem; it is a safety metric. Most drone regulations are based on the “Category of Risk,” which is directly tied to the kinetic energy a drone would transfer upon impact with a human being.
Kinetic Energy and Impact Force
The formula for kinetic energy is $KE = 1/2 mv^2$. Notice that velocity ($v$) is squared. This means that the speed at which a drone falls is the most critical factor in determining how dangerous it is. A drone falling at its terminal velocity represents the “worst-case scenario” impact. If a drone’s terminal velocity is high, its potential to cause injury increases exponentially. This is why many “flight over people” certifications require the drone to have a low mass or a built-in mechanism to reduce its terminal velocity.
Parachute Recovery Systems
To combat the dangers of high terminal velocity, many professional drone operators use Parachute Recovery Systems (PRS). A parachute works by dramatically increasing the surface area ($A$) and the drag coefficient ($C_d$) of the falling object. When a parachute deploys, it resets the terminal velocity of the drone to a “survivable” speed—usually around 3 to 5 meters per second. At this speed, the kinetic energy is reduced to a level that is unlikely to cause a fatality or significant property damage, allowing for legal flight over populated areas.
Terminal Velocity vs. Maximum Horizontal Speed
While terminal velocity is usually discussed in the context of falling, the same aerodynamic principles limit how fast a drone can fly horizontally. In high-speed FPV racing, pilots often talk about hitting a “wall.” This wall is effectively the horizontal equivalent of terminal velocity.
Propeller Pitch and Motor RPM
In horizontal flight, the “thrust” from the motors replaces gravity as the primary moving force. As the drone accelerates, the drag increases. Eventually, the drag force becomes so great that the motors do not have enough torque or RPM to overcome it. At this point, even at 100% throttle, the drone cannot go any faster.
Drag Limitations in High-Speed Racing
For racing drones, reaching high speeds requires minimizing the drag coefficient. This is why racing frames are slim and components are tucked away. However, even with the most powerful motors, a drone’s “top speed” is essentially the terminal velocity of the craft relative to the thrust it can produce. Understanding the terminal velocity of your specific airframe helps in choosing the right propeller pitch; a propeller with too much “grip” might create more drag than thrust at high speeds, effectively lowering the drone’s maximum velocity.
Strategies to Manage and Mitigate High-Speed Descents
Experienced pilots and developers use several techniques to manage the risks associated with high-velocity descents, ensuring that the drone remains controllable even when gravity is taking over.
Fail-safe Mechanisms and Software Limits
Modern flight controllers (like ArduPilot or PX4) have “max descent” limits programmed into the firmware. These limits ensure that even if a pilot pushes the stick all the way down, the drone does not enter a state of uncontrolled “vortex ring state” or approach its terminal velocity. The software maintains a level of propeller RPM to provide stabilization and air resistance, effectively creating a “controlled descent” that is much slower and safer than a free fall.
Aerodynamic Braking Techniques
In FPV flying, pilots often use “aerodynamic braking” to slow down after a high-speed dive. By pitching the drone up sharply (increasing the surface area facing the direction of travel), the pilot uses the drone’s own body as a drag-inducer. This utilizes the physics of terminal velocity in reverse—by intentionally increasing drag, the pilot forces the drone to slow down to a much lower equilibrium speed, allowing for a sharp turn or a controlled landing.
Conclusion
What speed is terminal velocity? For a drone, the answer is not a single number, but a range determined by weight, shape, and air density. From the 20 mph drift of a tiny quadcopter to the 100 mph plunge of a heavy-lift rig, terminal velocity defines the limits of UAV safety and performance. By understanding these principles, pilots can better appreciate the importance of weight distribution, the utility of parachutes, and the inherent risks of high-altitude flight. In the end, mastering the physics of the fall is just as important as mastering the physics of the flight.