In the rapidly evolving landscape of unmanned aerial vehicles (UAVs), the drive for progress is rarely a solitary pursuit. While we often view technological advancement through the lens of pure engineering, a deeper psychological framework—Social Comparison Theory—plays a pivotal role in shaping the current era of tech and innovation. Originally proposed by psychologist Leon Festinger in 1954, Social Comparison Theory suggests that individuals and entities determine their own social and personal worth based on how they stack up against others. In the context of drone technology, particularly within the realms of AI follow modes, autonomous flight, and remote sensing, this theory manifests as “competitive benchmarking.” It is the invisible force that drives manufacturers and software developers to push the boundaries of what is possible, ensuring that autonomous systems are not just functional, but superior to their predecessors and peers.
The Architecture of Benchmarking: Upward and Downward Comparison in AI
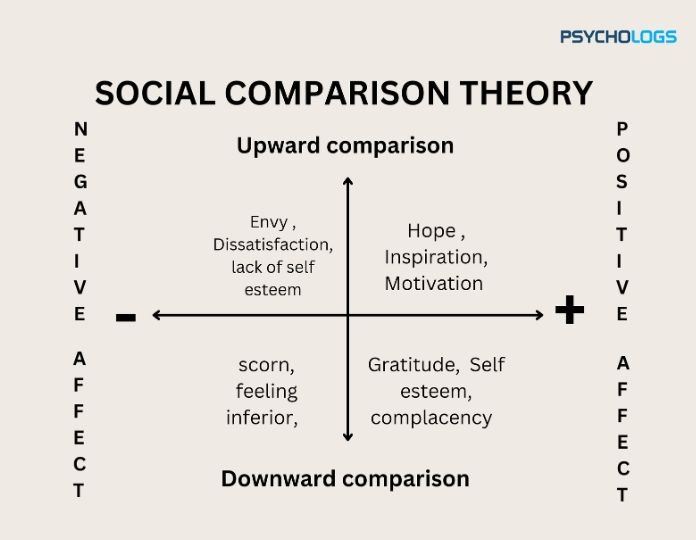
At its core, Social Comparison Theory involves two primary directions: upward comparison (comparing ourselves to those we perceive as better) and downward comparison (comparing ourselves to those we perceive as worse). In the tech and innovation sector of the drone industry, these comparisons are the primary catalysts for research and development.
Upward Comparison and the Pursuit of the “Gold Standard”
Upward comparison in drone innovation occurs when a company or research institution looks at the industry leader—be it in obstacle avoidance precision or AI-driven pathfinding—and identifies the gap between their current capabilities and that “gold standard.” This comparison creates a powerful incentive for innovation. For instance, when a developer sees an autonomous flight system capable of navigating dense forest canopies at high speeds, they are forced to re-evaluate their own algorithms. This leads to the integration of more sophisticated neural networks and faster processing units, as the “social” status of the technology is at stake. The upward comparison ensures that innovation never stagnates; as soon as one peak is reached, the “social” landscape of the industry shifts the target higher.
Downward Comparison as a Safety and Reliability Metric
While upward comparison drives performance, downward comparison often focuses on safety, stability, and market accessibility. Developers analyze legacy systems—older autonomous modes that lacked robust redundancy—to ensure their new innovations are demonstrably safer. By comparing new AI follow modes against the “failed” or “limited” parameters of previous generations, innovators can quantify their progress. This comparison is vital in remote sensing and mapping, where the “downward” look at previous errors (such as signal drift or low-resolution data stitching) provides a clear roadmap for what the new technology must avoid. It establishes a baseline of “minimum viable innovation” that keeps the industry moving forward without repeating past mistakes.
Multi-Agent Systems and the Theory of Comparative Learning
Social Comparison Theory isn’t just a metaphor for corporate competition; it is increasingly being encoded into the very logic of multi-agent autonomous systems. As we move toward drone swarms and collaborative mapping fleets, the “social” interaction between individual units becomes a technical reality.
Swarm Intelligence and Peer-to-Peer Evaluation
In a drone swarm, individual units must constantly compare their spatial data and flight telemetry with their “peers.” This is a technical manifestation of social comparison. If one unit in a mapping swarm detects an obstacle or a change in wind resistance that others haven’t, the swarm uses comparative logic to adjust the flight paths of the entire group. This “peer evaluation” allows the collective to perform more efficiently than a single, high-powered unit could. The innovation here lies in the communication protocols that allow drones to “compare” their situational awareness in real-time, leading to a level of autonomous synergy that mimics biological social structures.

Adaptive AI and Mimetic Learning
Modern AI follow modes are beginning to utilize mimetic learning—a concept closely tied to how humans use social comparison to learn new skills. In autonomous flight innovation, this involves training AI models by having them “compare” their predicted flight path against a “master” path flown by a human pilot or a superior simulation. Through millions of iterations of this comparison, the AI identifies discrepancies and adjusts its weights. This comparative feedback loop is the engine behind the latest breakthroughs in autonomous racing and complex cinematography flight paths. The machine is essentially asking, “How does my performance compare to the ideal?” and closing that gap through recursive innovation.
Competitive Innovation in Mapping and Remote Sensing
In the niche of remote sensing and mapping, the Social Comparison Theory operates through the lens of data integrity and precision. When a new sensor or mapping software enters the market, its value is defined almost entirely by how its output compares to existing datasets.
The Standard of Precision in LiDAR and Photogrammetry
Innovation in remote sensing is a race for higher resolution and lower margins of error. When a new LiDAR (Light Detection and Ranging) system is developed, its success is predicated on its comparative advantage over existing photogrammetry methods. This comparison drives the industry to integrate better GPS/GNSS systems and more sensitive IMUs (Inertial Measurement Units). Developers are constantly looking at the “social” landscape of data—what researchers and surveyors currently accept as “accurate”—and attempting to redefine that accuracy. This creates a cycle where the “innovation” of today becomes the “baseline” of tomorrow, purely through the pressure of comparative expectations.
Technological Leapfrogging in Autonomous Data Processing
Remote sensing is no longer just about capturing data; it is about the autonomous processing of that data. Social Comparison Theory explains the “leapfrogging” effect seen in software innovation. When one company releases an AI-driven mapping tool that reduces processing time by 50%, the comparison instantly devalues all other existing tools. This forced evolution pushes competitors to not just match, but to leapfrog that innovation by introducing even more advanced features, such as real-time 3D cloud rendering or automated feature extraction. The “social” pressure of the market’s demand for the fastest, most accurate data ensures that the tech remains in a constant state of flux.
Defining the “Golden Standard”: The Future of Collaborative Autonomy
As we look toward the future of drone tech and innovation, the principles of Social Comparison Theory are being formalized into industry standards. These standards act as the “social contract” that all new autonomous systems must fulfill to be considered innovative.
The Role of Standardization as a Comparative Benchmark
Innovation often requires a common language. In the world of autonomous flight, standardization (such as MAVLink protocols or OpenTX) provides the framework for comparison. By having a set of standardized benchmarks, innovators can clearly demonstrate how their new AI follow mode or sensing array outperforms the status quo. This formalization of comparison allows for a more structured evolution of technology. Instead of isolated improvements, we see a global “social” effort where developers across the world build upon each other’s work, using the established standards as a ladder for upward comparison.
Toward “Self-Aware” Autonomous Systems
The ultimate frontier of drone innovation is the development of systems that can perform self-comparison. Imagine a drone equipped with remote sensing technology that can evaluate the quality of its own data capture in real-time, comparing it against the mission’s required parameters. If the data doesn’t “measure up,” the drone autonomously adjusts its flight path, altitude, or sensor settings. This move from external comparison (comparing one drone to another) to internal, autonomous comparison (comparing current performance to a mission ideal) represents the pinnacle of AI innovation. It is the transition of Social Comparison Theory from a psychological observation to a functional, algorithmic reality.
In conclusion, “What is the social comparison theory” in the context of drone innovation? It is the foundational engine of the industry. It is the psychological and technical drive that forces a developer to look at a competitor’s AI follow mode and say, “We can make it smarter.” It is the benchmark that a mapping drone uses to ensure its data is the most precise in the field. By understanding this theory, we gain insight into why drone technology moves so fast. We are not just building machines; we are participating in a global, high-stakes game of comparative evolution, where every new autonomous feature, every increase in sensor resolution, and every leap in AI capability is a response to the “social” landscape of the tech world. In the end, the drones that soar the highest are the ones that have most effectively navigated the complex world of comparison.