In the realm of modern aviation, specifically regarding Unmanned Aerial Vehicles (UAVs), the concept of a “line” transcends the basic geometry taught in secondary education. When we ask “what is the equation of the line” in the context of flight technology, we are delving into the mathematical backbone of navigation, path planning, and autonomous stabilization. Every autonomous mission, from a simple automated take-off to a complex high-altitude mapping operation, relies on the ability of a flight controller to calculate, maintain, and correct its position relative to a linear trajectory.
Understanding the equation of the line within flight technology requires a shift from two-dimensional Cartesian planes to three-dimensional vector space. For a drone, a line is not just a mark on a map; it is a temporal and spatial commitment. This article explores how linear mathematics governs the precision of modern flight systems, ensuring that drones can navigate the skies with surgical accuracy.
The Geometry of Navigation: Defining the Flight Path
At its core, flight navigation is the process of moving an aircraft from Point A to Point B. In the most efficient scenario, this path is a straight line. To a flight computer, this “line” is a series of coordinates processed through algorithms that determine the shortest distance between two waypoints while accounting for three-dimensional space.
From Cartesian Coordinates to GPS Waypoints
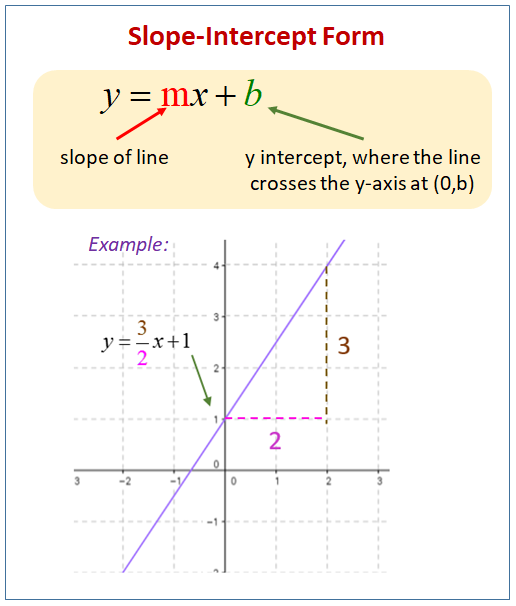
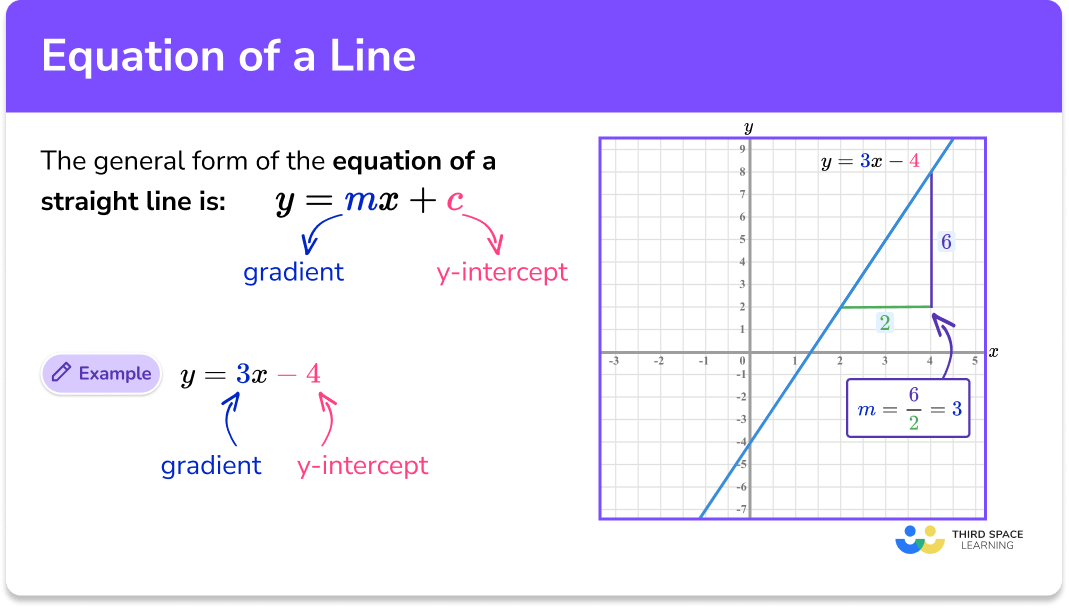
In a classroom, the equation of a line is often expressed as $y = mx + b$. In flight technology, we replace $x$ and $y$ with latitude and longitude (and $z$ for altitude). However, because the Earth is an oblate spheroid, calculating a “straight line” over long distances involves spherical trigonometry. For short-range drone operations, however, the flight controller often uses a Local Tangent Plane (LTP) or a North-East-Down (NED) coordinate system. Here, the “equation of the line” becomes a vector equation: $mathbf{r} = mathbf{a} + tmathbf{d}$. This allows the drone to understand its position ($mathbf{r}$) at any given time ($t$) based on its starting point ($mathbf{a}$) and its direction vector ($mathbf{d}$).
The Role of Linear Algebra in Flight Controllers
Modern flight controllers, such as those based on the ArduPilot or PX4 firmware, utilize linear algebra to handle the heavy lifting of navigation. When a pilot sets a mission path, the software generates a series of linear segments. The drone’s processor must constantly solve these linear equations to ensure the craft hasn’t drifted. This involves calculating the Euclidean distance between the drone’s current GPS coordinates and the nearest point on the intended linear trajectory. By treating the flight path as a mathematical vector, the system can provide instantaneous corrections to the motor output.
Vector-Based Path Planning and Line-Following Algorithms
Simply knowing the equation of the line is not enough; a drone must be able to “follow” it despite external variables like wind, signal latency, and mechanical vibration. This is where path-following algorithms come into play, turning an abstract mathematical line into a physical corridor of flight.
Cross-Track Error and Path Correction
One of the most critical concepts in flight technology is the Cross-Track Error (XTE). If the “equation of the line” represents the desired path, the XTE represents the perpendicular distance between the drone’s actual position and that line. Flight controllers use Proportional-Integral-Derivative (PID) loops to minimize this error. If the XTE is non-zero, the flight controller identifies that the drone has “fallen off” the equation of the line and calculates the necessary roll or yaw adjustments to intersect back with the intended path.
Pure Pursuit Guidance: Staying on the Line
“Pure Pursuit” is a common tracking algorithm used in autonomous flight. Instead of simply trying to move back toward the closest point on the line, the drone looks at a “target point” further ahead on the linear trajectory. By calculating the arc required to reach that future point on the line, the drone achieves much smoother transitions and stays closer to the mathematical ideal of the path. This foresight is what allows professional-grade UAVs to maintain high speeds during autonomous missions without “overshooting” corners or wobbling along the line.
Sensing the Horizon: The Equation of the Line in Sensor Fusion
Flight technology doesn’t just use lines for navigation; it uses them for stabilization and orientation. The “line” of the horizon is perhaps the most important visual and mathematical reference for any flying machine. Through sensor fusion—combining data from IMUs, gyroscopes, and accelerometers—the drone maintains a constant awareness of its relationship to the horizontal plane.
IMU Data and Linear Motion Prediction
An Inertial Measurement Unit (IMU) tracks linear acceleration along three axes. By integrating this acceleration over time, the flight controller calculates the drone’s linear velocity and position. The “line” here is the predicted trajectory based on current momentum. If the drone is supposed to be hovering (a stationary point), but the IMU detects linear movement, the system applies counter-thrust. This constant battle to maintain a “zero-length line” is what provides the rock-solid stability seen in modern GPS-stabilized drones.
Optical Flow and Geometric Ground Tracking
For environments where GPS is unavailable—such as inside warehouses or under bridges—drones use Optical Flow sensors. These sensors “draw” imaginary lines between contrasting pixels on the ground across successive frames of high-speed video. By calculating the slope and length of these lines, the flight technology can deduce the drone’s ground speed and direction. This is essentially a real-time application of the slope-intercept form, where the “slope” of the moving pixels tells the drone exactly how fast it is moving relative to the earth.
Precision Mapping and Photogrammetry: The Grid as a Series of Lines
In the field of remote sensing and mapping, the “equation of the line” is the fundamental unit of the mission. For a drone to create a high-resolution 3D map, it must fly a “lawnmower” pattern—a series of perfectly parallel lines with specific overlap.
Calculating Parallel Flight Tracks
When a surveyor inputs a boundary into mapping software, the algorithm generates a series of parallel lines. The distance between these lines (the “sidelap”) is determined by the camera’s field of view and the desired resolution. These aren’t just arbitrary paths; they are precisely calculated linear equations. If the drone deviates by even a few meters from the calculated line, the resulting map will have “holes” or blurry sections where the data fails to stitch together.
Constant Velocity and Linear Interpolation
For high-quality imaging, the drone must maintain a constant velocity along the line. This is referred to as linear interpolation of movement. The flight controller ensures that the shutter triggers at exact intervals along the linear path. This synchronization of time, speed, and distance is a practical application of the linear motion equation ($d = vt$). By mastering the line, flight technology enables us to turn thousands of individual photos into a single, seamless digital twin of a construction site or agricultural field.
Challenges in Maintaining Linear Precision in Variable Environments
Despite the mathematical perfection of a line, the real world is chaotic. Flight technology must bridge the gap between the “perfect line” of the software and the “curved reality” of the atmosphere.
Wind Compensation and Dynamic Adjustments
Wind is the greatest enemy of the linear flight path. A crosswind will naturally push a drone off its intended equation. Advanced flight technology uses “crab” maneuvers—where the drone points its nose into the wind while moving sideways—to stay on the line. The flight controller is essentially solving a vector addition problem in real-time: the drone’s thrust vector plus the wind vector must equal the vector of the intended flight line.

The Future of Neural-Network Based Trajectory Modeling
As we move toward more advanced AI in flight technology, the way we define the “equation of the line” is evolving. Future systems may not use rigid geometric formulas but rather neural networks that predict the best “line” of flight through complex obstacles. These systems will go beyond $y = mx + b$, using non-linear regressions and machine learning to find the most efficient path through turbulent or cluttered environments, while still maintaining the core objective: getting from one point to another with mathematical certainty.
In conclusion, when we ask “what is the equation of the line” in the context of flight technology, we are exploring the very essence of how machines conquer the sky. From the simple waypoints of a hobbyist drone to the sophisticated grid patterns of an industrial mapping UAV, the line remains the most fundamental and vital tool in the navigator’s arsenal. It is the bridge between human intent and autonomous execution.