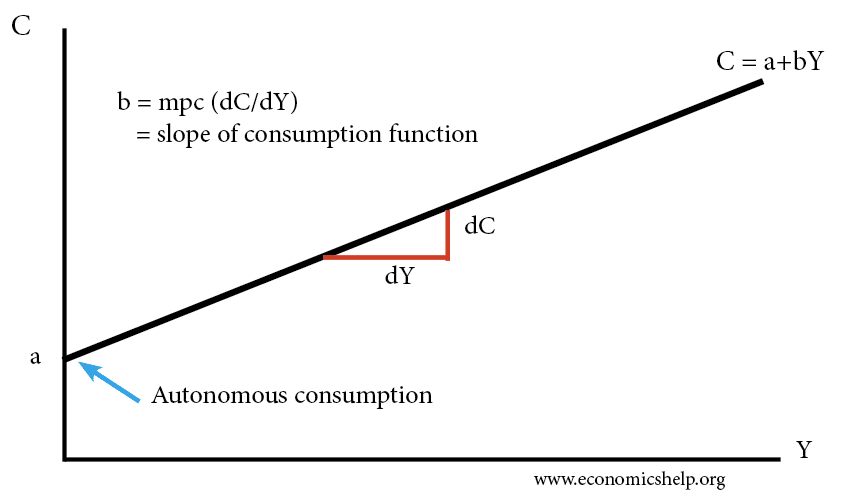
While the acronym MPC is widely recognized in the field of economics as the “Marginal Propensity to Consume,” in the rapidly evolving world of unmanned aerial vehicles (UAVs) and flight technology, it represents something entirely different and arguably more complex: Model Predictive Control. As drones transition from simple hobbyist gadgets to sophisticated autonomous machines capable of high-speed maneuvers and precision tasks, the limitations of traditional stabilization systems have become apparent.
Model Predictive Control (MPC) has emerged as the gold standard for advanced flight control systems. It is the mathematical brain that allows a drone to not just react to its current environment, but to predict future states and adjust its flight path accordingly. This article explores the intricate world of MPC within flight technology, detailing how it outperforms traditional controllers and why it is essential for the next generation of autonomous aerial navigation.
The Evolution from PID to MPC in Flight Control
To understand why MPC is a game-changer for flight technology, one must first understand what it replaced. For decades, the backbone of drone stabilization has been the PID (Proportional-Integral-Derivative) controller. While PID is effective for basic hovering and steady flight, the demands of modern UAV applications require a more “intelligent” approach.
Limitations of Traditional PID Controllers
PID controllers are reactive. They look at the “error” (the difference between the desired position and the current position) and apply a correction. While this works well for maintaining a level hover in calm conditions, PID controllers struggle with “non-linear” dynamics—situations where the drone’s behavior changes rapidly due to high speeds, heavy payloads, or aggressive banking. PID systems do not “know” the physics of the drone; they simply react to deviations. This often leads to overshooting the target or instability during complex maneuvers.
What is Model Predictive Control (MPC)?
Model Predictive Control represents a paradigm shift because it is proactive rather than reactive. At its core, MPC uses a mathematical model of the drone’s physics—including mass, inertia, thrust-to-weight ratio, and aerodynamics—to predict how the aircraft will behave in the future.
Instead of just looking at where the drone is now, an MPC-enabled flight controller simulates thousands of possible flight paths over a short “prediction horizon” (usually the next few seconds). It then selects the optimal set of motor commands that will achieve the desired goal while staying within the physical limits of the aircraft. This process is repeated hundreds of times per second, creating a “receding horizon” effect that ensures the drone is always on the most efficient and stable path.
How MPC Enhances Drone Navigation and Stabilization
The primary advantage of MPC in flight technology is its ability to handle constraints. In flight, constraints are everywhere: motors can only spin so fast, the battery can only provide so much current, and the drone cannot tilt past a certain angle without losing lift.
Predictive Modeling and Constraint Handling
Traditional flight systems often run into “saturation” issues—where a controller asks a motor to do something it physically cannot do, leading to a crash. MPC solves this by incorporating constraints directly into its optimization algorithm. If the system knows that a sharp turn at high speed will exceed the motor’s torque limits, it will calculate a wider, safer arc well before the drone reaches the turn. This “look-ahead” capability allows drones to fly much closer to their physical limits without the risk of losing control, which is vital for racing drones and high-speed delivery UAVs.
Managing External Disturbances (Wind and Inertia)
Flight environments are rarely static. Wind gusts, air pressure changes, and the shifting center of gravity (especially in drones carrying liquid payloads or moving cameras) create “disturbances.” MPC is exceptionally good at rejecting these disturbances. Because it understands the model of the drone, it can differentiate between a command given by the pilot and an external force like a crosswind. By predicting how a gust will affect the drone’s trajectory, the MPC can apply counter-thrust before the drone is significantly pushed off course, resulting in rock-solid stabilization that feels “locked-in” compared to the floaty feel of PID systems.
The Role of MPC in Complex Flight Scenarios
As we move toward autonomous “beyond visual line of sight” (BVLOS) operations, drones must navigate complex environments without human intervention. This is where the predictive nature of MPC becomes a necessity for flight safety.
High-Speed Obstacle Avoidance
When a drone is flying through a forest or an industrial warehouse at 30 miles per hour, there is no room for error. Obstacle avoidance systems using MPC can integrate data from LiDAR and depth cameras to “map” obstacles into the optimization problem. The controller doesn’t just see a wall and stop; it calculates a trajectory that weaves around the wall while maintaining the highest possible speed. Because MPC is predictive, it can begin the banking maneuver for a turn long before it reaches the obstacle, ensuring a smooth, cinematic, and safe flight path.
Precision Trajectory Tracking
For applications like 3D mapping, infrastructure inspection, or aerial light shows, a drone must follow a pre-defined path with centimeter-level accuracy. MPC is the ideal tool for trajectory tracking because it minimizes the “tracking error” over the entire predicted path. In a PID system, a drone might drift wide on a corner and then try to over-correct. An MPC system anticipates the corner, slows down slightly to maintain the line, and accelerates out of the turn, ensuring the drone stays exactly where it is supposed to be.
Hardware Requirements and Implementation Challenges
Despite its superiority, MPC is not yet found in every toy drone. The reason lies in the sheer amount of mathematics required to run these systems in real-time.
Computational Costs and Processing Power
MPC requires solving a complex “quadratic programming” optimization problem every few milliseconds. This is computationally expensive. While a simple PID loop can run on a basic 8-bit microcontroller, a high-performance MPC system typically requires 32-bit ARM processors or specialized Flight Control Units (FCUs) like those found in high-end industrial drones or advanced DIY platforms running PX4 or ArduPilot with companion computers. As mobile processing power continues to increase and become more energy-efficient, we are seeing MPC move from laboratory research into commercial-off-the-shelf (COTS) flight controllers.
Integrating Sensors and GPS Data
For MPC to work, it needs a perfect understanding of the drone’s current state. This requires high-fidelity data from an Inertial Measurement Unit (IMU), GPS, and often optical flow sensors. If the sensor data is “noisy” or inaccurate, the mathematical model will make incorrect predictions. Therefore, the implementation of MPC goes hand-in-hand with advanced sensor fusion techniques, such as Extended Kalman Filters (EKF), which clean and combine sensor data to provide the MPC with a clear picture of reality.
The Future of MPC in Autonomous Flight Technology
The ultimate goal of flight technology is full autonomy—the ability for a drone to take off, complete a complex mission in an unmapped environment, and land, all without human input. MPC is the bridge to this future.
Synergy with AI and Machine Learning
The next frontier for MPC is the integration of Artificial Intelligence. While traditional MPC relies on a fixed mathematical model, “Learning-based MPC” uses machine learning to update the model in real-time. If a drone loses a propeller or suffers a motor malfunction, a learning-based MPC can detect the change in the drone’s physics and “re-learn” how to fly the damaged aircraft on the fly. This level of resilience is critical for the safety of urban air mobility (UAM) and passenger-carrying drones.
Moving Toward Full Autonomy
As we look toward a future filled with autonomous delivery swarms and aerial taxis, Model Predictive Control will be the silent pilot ensuring these vehicles interact safely. By allowing drones to communicate their “predicted paths” to one another, MPC enables sophisticated “swarm” behaviors where drones can fly in tight formations without colliding, even in turbulent weather.
In conclusion, while “MPC” might mean one thing to an economist, to a flight engineer, it represents the pinnacle of control theory. By shifting from a reactive “correction” mindset to a proactive “prediction” mindset, Model Predictive Control has unlocked new levels of stability, speed, and safety in drone technology. As hardware becomes more powerful and algorithms more refined, MPC will continue to be the driving force behind the most advanced flight systems in the world, turning the dream of truly autonomous flight into a daily reality.